
本舰机动分辨目标左右舷建模与仿真
2012-09-19 02:10:40林宗祥孙永侃熊正祥
水下无人系统学报 2012年6期
林宗祥, 孙永侃, 熊正祥
本舰机动分辨目标左右舷建模与仿真
林宗祥, 孙永侃, 熊正祥
(海军大连舰艇学院科研部, 辽宁大连, 116018)
为研究本舰机动分辨目标左右舷的转向角度, 分析了本舰机动分辨目标左右舷推理规则可能存在的误判问题。综合考虑敌我运动和转向时间等因素, 建立了本舰机动分辨目标左右舷的细化模型。仿真结果表明, 本舰转向方向与目标所处舷角方向相反时, 分辨目标左右舷所需的转向角度较小; 反之, 则需较大的转向角。最后, 根据仿真结果, 利用1stOpt软件进行拟合得到本舰转向后目标舷角最大值和最小值的多项式表达式, 并完善了本舰机动的推理规则以更加可靠地判断目标左右舷。
本舰机动; 左右舷分辨; 转向角度; 建模与仿真
0 引言
被动拖曳线列阵声纳存在一个显著缺点是不能分辨目标左右舷, 即存在左右舷模糊问题。为此, 需要通过本舰机动分辨目标左右舷。从作战使用的角度考虑, 指挥员关心的是如何实施本舰机动以便可靠地分辨出目标左右舷。目前为止, 对于如何实施本舰机动以实现对目标左右舷的分辨研究得较少。如何实施本舰机动的关键是确定机动角度的大小, 即本舰应该机动多大角度的问题。本文就该问题进行初步探讨。
1 本舰机动分辨目标左右舷存在的问题
1.1 本舰机动分辨目标左右舷的推理规则
根据以上分析, 本舰机动分辨目标左右舷的推理规则如下。
1) 本舰向左转向: 目标舷角增大, 则目标在右舷; 目标舷角减小, 则目标在左舷。
2) 本舰向右转向: 目标舷角增大, 则目标在左舷; 目标舷角减小, 则目标在右舷。
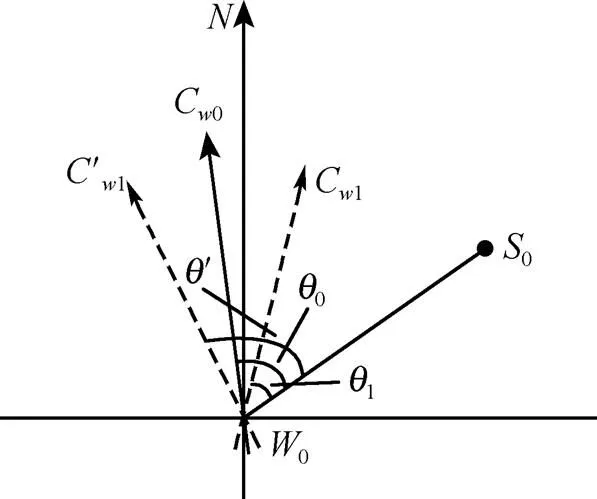
图1 本舰机动推断目标左右舷原理
1.2 本舰机动分辨目标左右舷存在的问题
本舰机动分辨目标左右舷的推理规则基于以下假设: 1) 本舰转向立即完成, 即不考虑本舰转向所耗费的时间以及本舰转向过程中的位置变化; 2) 不考虑本舰转向过程中的目标运动; 3) 不考虑拖曳线列阵声纳的测向误差。
根据推理规则, 理论上本舰只需做一个小角度的机动, 即可分辨出目标左右舷。实际上, 本舰机动过程中自身位置在发生变化, 而目标也在不断运动。考虑到本舰和目标的相对运动以及拖曳线列阵声纳的探测误差, 如若本舰转向角度不恰当, 可能出现与推理规则相悖的情况。此时, 若采用推理规则, 则可能误判目标所处的舷侧, 下面仅举一例说明。
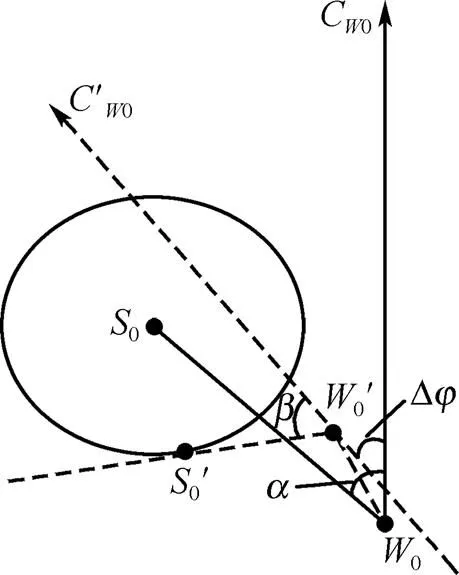
图2 误判目标左右舷的情况
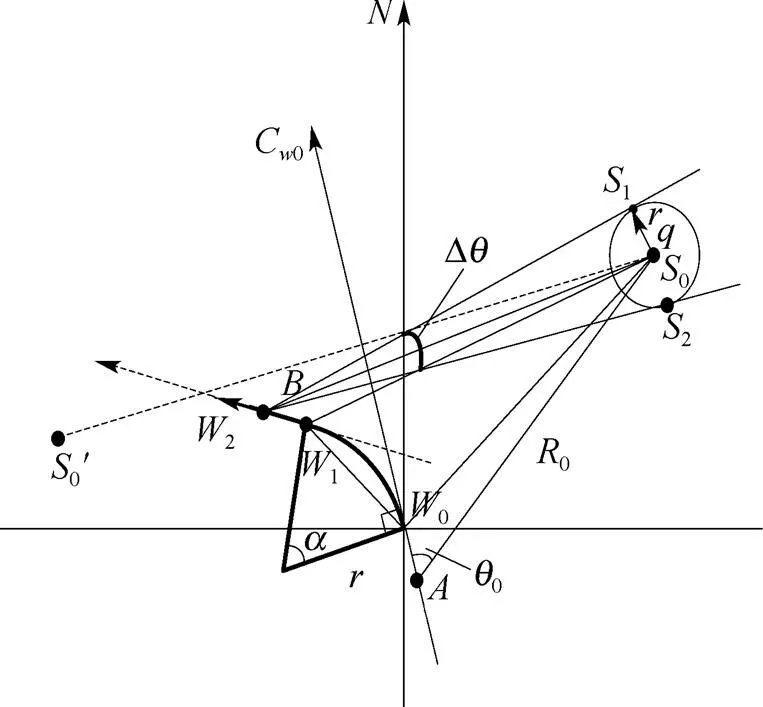
图3 目标在右舷本舰向左转向
2 本舰机动分辨目标左右舷模型
2.1 目标位于右舷本舰向左转向
本舰完成转向到重新测得目标方位耗费时间
=-(2)
由几何关系可得
(4)

(6)
则

(8)

又
(10)
则
(12)

(14)

(16)
2.2 目标位于右舷本舰向右转向
目标位于右舷本舰向右转向如图4所示。则式(7)、式(10)应分别变为式(17)、式(18)。

(18)
图4 目标在右舷本舰向右转向
Fig. 4 Mother ship turning right while target on starboard side

3 仿真结果与分析
3.1 仿真条件

(21)
3.2 仿真结果与分析
根据3.1节分析, 取典型情况的仿真结果如表1所示。
表1 目标在右舷本舰向左转向
由表1可知, 在相同的仿真条件下, 本舰机动方向不同, 对应的,值也不同。
此外, 本舰转向方向的选择对分辨目标左右舷具有重大影响。例如, 以条件2(=15 km,=60º,=9º)为仿真初始值, 本舰向左转向时, 本舰完成转向后测得的目标舷角范围为60.8º ~94.4º, 满足目标舷角增大的推理规则。此时, 可以推断出目标在右舷。若本舰选择向右转向, 则转向后目标所处舷角范围为41.7º ~76.3º, 难以满足目标舷角减小的推理规则。此时, 推断不出目标所处的舷侧。
3.3 参数拟合
(23)
本文使用1stOpt软件进行拟合。以目标在右舷本舰向左转向的仿真结果为例, 拟合的初始数据如表2所示。拟合得到的多项式系数如表3所示。拟合过程中发现项对拟合精度影响不大, 拟合时将其设置为0。
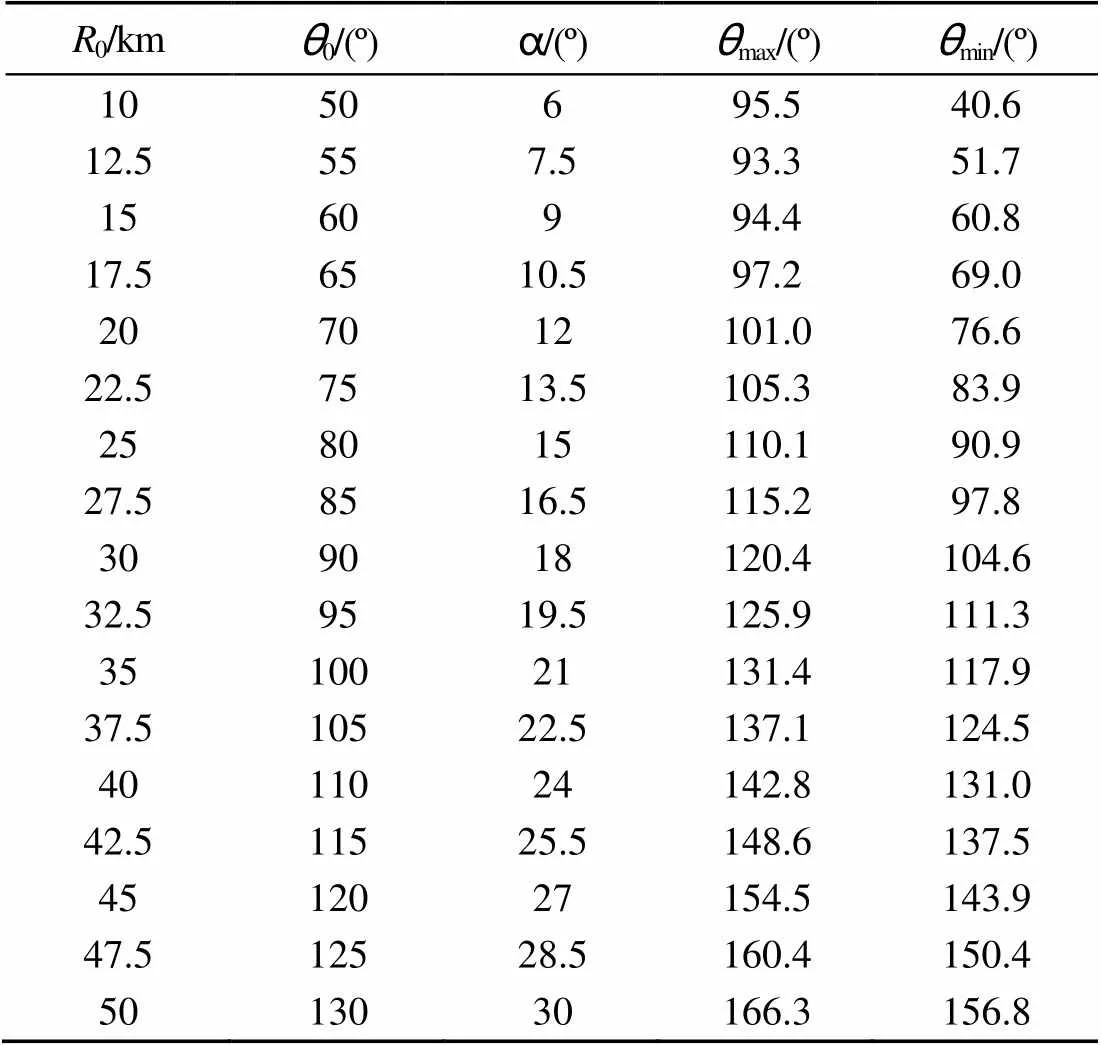
表2 初始拟合数据
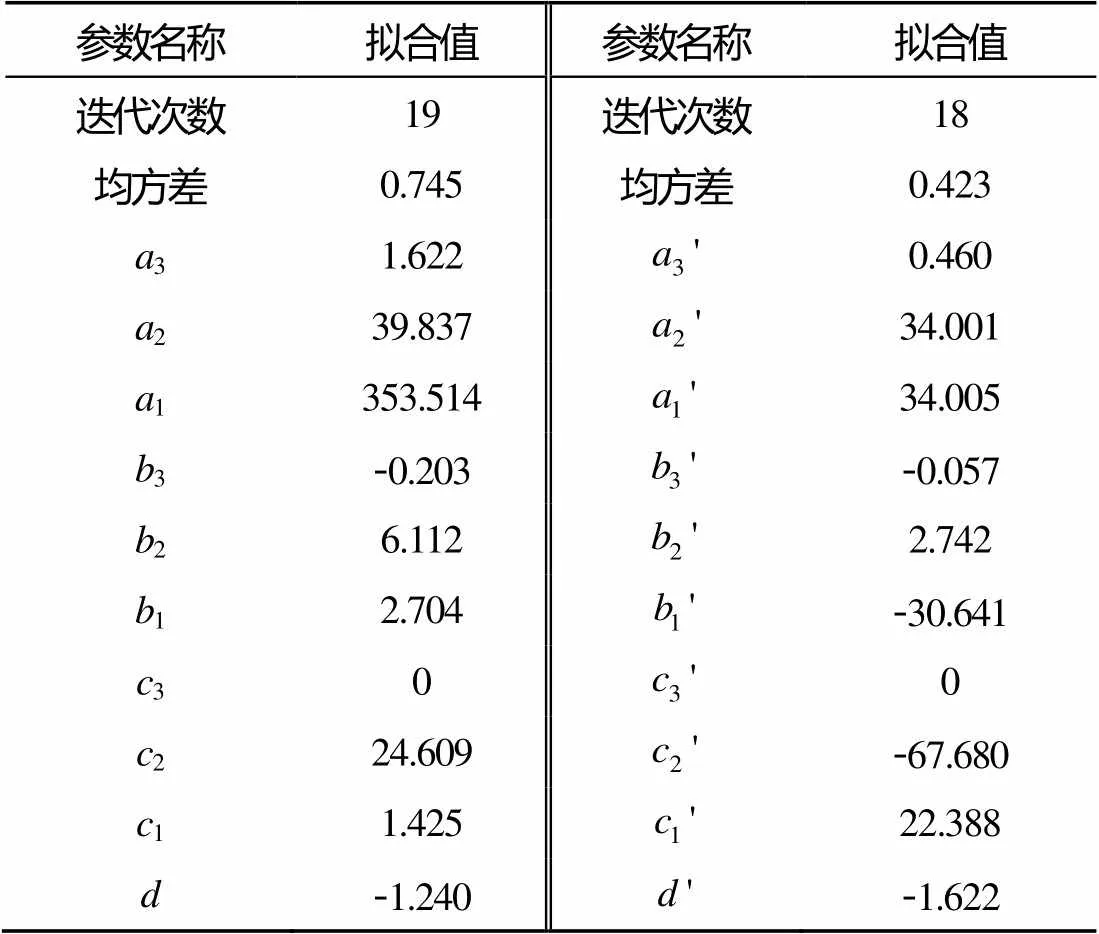
表3 拟合系数
3.4 作战使用建议
本舰机动分辨目标左右舷的核心决策内容是机动角度的大小。假设在目标初始舷角、初始距离情况下, 本舰转向角度大小。根据以上模型分析可得本舰转向完成后目标可能的最大舷角和最小舷角。要确保对目标左右舷不发生误判, 应将本舰机动的推理规则修改如下。
3) 若不满足以上1)、2)两种情况, 则难以可靠地分辨出目标左右舷。此时, 应增大本舰转向角度, 以确保能够符合1)和2)的条件。
4 结束语
本舰机动分辨目标左右舷是基于拖曳线列阵声纳远距离反潜的重要战术决策内容。本文建立了本舰机动分辨目标左右舷的细化模型, 仿真了本舰转向后的目标舷角与不同敌我距离、不同初始舷角以及不同转向角和转向方向的关系。仿真结果表明这些因素共同影响着转向后的目标舷角。在此基础上利用1stOpt软件拟合获得了本舰转向完成后的目标舷角最大值、最小值的表达式。最后, 为可靠地推断出目标所处舷侧, 对本舰机动推断目标左右舷的推理规则进行了完善。
本文研究成果有助于指挥员在进行本舰机动科学合理地选择合适的转向角度。为后续本舰机动辅助决策模型的建立提供了参考。
[1] 何心怡, 张春华, 张驰, 等. 本舰机动左右舷分辨方法研究[J]. 应用声学, 2006, 25(6): 352-358.He Xin-yi, Zhang Chun-hua, Zhang Chi, et al. Study on the Port/starboard Discrimination by Mother Ship Maneuverability[J]. Applied Asooustics, 2006, 25(6):352-358.
[2] 何心怡, 张春华, 李启虎. 拖曳线列阵声呐及其左右舷分辨方法概述[J]. 舰船科学技术, 2006, 28(5): 9-14.He Xin-yi, Zhang Chun-hua, Li Qi-hu. Rough Introduction of the Towed Linear Array Sonar and Port/starboard Discrimination Methods[J]. Ship Science and Technology, 2006, 28(5): 9-14.
[3] 郭书城, 尹四德. 拖曳线列阵声纳判断目标左右舷模糊方法研究[J]. 舰船科学技术, 2005, 27(5): 64-67.Guo Shu-cheng, Yin Si-de. Study of the Way of Judging Port and Starboard Ambiguity of Towed Linear Array Sonar[J].Ship Science and Technology, 2005, 27(5): 64-67.
[4] 七维高科. 1stOpt使用手册[M]. 北京: 七维高科, 2009.
(责任编辑: 许 妍)
Modeling and Simulation of Mother Ship Maneuver for Discriminating Port/Starboard of Target
LIN Zong-xiang, SUN Yong-kan , XIONG Zheng-xiang
(Scientific Research Department, Dalian Naval Academy, Dalian 116018, China)
To understand the turning angle for mother ship to discriminate the port/starboard of a target, the possible false deduction in the reasoning rule of discrimination is analyzed. A detailed model of mother ship maneuver for discriminating port/starboard of a target is established, in which such factors as the maneuvers of mother ship and target, the maneuvering time of mother ship, and so on, are taken into account. Simulation results indicate that a smaller turning angle is needed to discriminate port/starboard of a target when mother ship′s maneuver direction is opposite to the board angle in which target locates, otherwise a larger turning angle is needed. The polynomial expressions of target board angle′smaximum and minimumjust after mother ship maneuver are obtained by fitting the simulation data with the software 1stOpt. Subsequently, the reasoning rule for discriminating port/starboard of a target is improved for more reliable discrimination.
mother ship maneuver; port/starboard discrimination; turning angle; modeling and simulation
U666.7; E843
A
1673-1948(2012)06-0458-05
2012-06-05;
2012-07-20.
林宗祥(1984-), 男, 在读博士, 研究方向为水面舰艇反潜作战辅助决策.
猜你喜欢
小猕猴智力画刊(2024年2期)2024-04-14 02:07:12
作文与考试·小学低年级版(2022年22期)2022-03-23 20:39:15
孩子(2020年2期)2020-04-09 08:14:42
家教世界(2020年4期)2020-01-03 06:13:30
电光与控制(2018年11期)2018-11-21 03:38:22
船舶经济贸易(2018年7期)2018-08-02 07:24:24
电光与控制(2018年4期)2018-04-19 01:19:59
小学生·多元智能大王(2014年3期)2014-03-21 23:36:00
舰船科学技术(2013年7期)2013-03-08 06:42:32
诗歌月刊(2009年4期)2009-05-22 03:38:04
