
基于Petri网的鱼雷保障虚拟训练系统
2012-09-19 02:04:34起1波2麻志峰3
水下无人系统学报 2012年6期
张 起1, 黄 波2, 麻志峰3
基于Petri网的鱼雷保障虚拟训练系统
张 起, 黄 波, 麻志峰
(1. 海军装备部, 北京, 100073; 2. 海军潜艇学院导弹兵器系, 山东青岛, 266042; 3. 92840部队, 山东青岛, 266405)
结合当前鱼雷武器保障训练实际需求, 设计了基于虚拟样机和仿真控制技术的鱼雷保障虚拟训练系统方案。详细论述了基于维修知识描述Petri网的鱼雷保障过程, 通过分析其保障资源、约束条件和操作过程建模, 得出了鱼雷保障过程的建模原则, 设计了该虚拟训练系统仿真流程。通过仿真实例说明, Petri网能很好地解决系统中的资源及作业结果对操作过程的约束问题。
鱼雷保障; 虚拟训练; Petri网; 仿真
0 引言
鱼雷技术保障水平直接影响着武器装备效能的发挥, 高技术和高集成度的现代鱼雷武器对技术保障水平提出了更高的要求。而鱼雷技术保障的复杂性和系统性制约了实装训练的全面深入开展, 影响了部队技术保障水平的科学快速提升。为此, 各种模拟训练手段陆续被应用到鱼雷武器的保障训练中。
近年来, 虚拟仿真技术在鱼雷武器训练中的应用已经不少, 但多数仅局限于2D的、简单逻辑关系的键盘鼠标模式下的虚拟作业, 其环境、复杂逻辑关系和训练方式的仿真度较低。文中针对鱼雷技术保障训练的实际需求, 将基于维修知识描述Petri网技术应用到构建鱼雷保障过程模型中, 并在此基础上对鱼雷保障体系及各岗位作业过程进行了仿真建模, 其能够真实反映实际保障任务中各种复杂的约束关系、作业模式和场景。
1 鱼雷保障虚拟训练系统构成
鱼雷保障虚拟训练系统是通过对鱼雷的保障作业体系进行仿真建模, 得到与真实保障过程相同虚拟训练体系框架。其主要由虚拟装备样机和虚拟保障训练仿真控制两大部分组成, 具体包括虚拟环境生成和输出、虚拟人体控制及人机交互、保障作业过程控制、装备虚拟样机及功能行为描述、虚拟训练效果评估等模块组成, 其相互间的连接关系如图1所示。
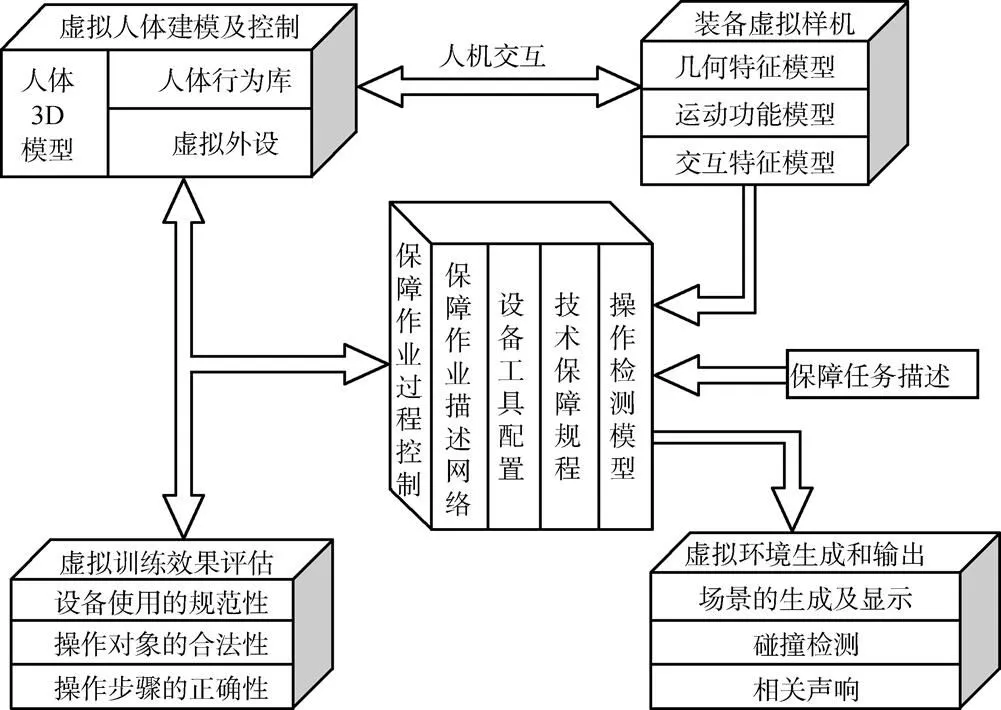
图1 技术保障虚拟训练系统构成
其中各模块功能如下:
1) 虚拟环境生成和输出。建立具有真实感的虚拟环境, 包括: 生成逼真的技术保障区场景; 将虚拟装备、工具和人体模型导入到虚拟场境; 随着保障训练工作的展开推进, 通过保障作业控制模块对场景和虚拟设备实时刷新和显示。
2) 虚拟人体建模及控制。将用户的运动进行跟踪, 并映射到虚拟人的操作动作。利用碰撞检测方法对虚拟操作进行判别, 并产生相应的触觉和声音信号, 以便形成良好的人机协同运动。
3) 保障作业过程控制。规范保障作业的相关信息, 包括过程类信息和控制类信息。过程类信息主要指技术保障的规程和具体操作步骤, 即各项操作的逻辑顺序; 控制类信息则是对整个训练过程进行监控、记录和辨别, 并给出适人化的指导。
4) 装备虚拟样机。是虚拟鱼雷及设备工具行为模型。借助人机交互平台, 根据虚拟鱼雷状态和虚拟操作响应, 实时更新与管理虚拟鱼雷及设备工具状态。
该系统可全面反映鱼雷保障过程中的各个环节, 为虚拟训练提供高仿真度的交互关系和感官体验, 其核心则是保障作业过程的仿真建模, 即本文研究的重点内容。
2 基于维修知识描述Petri网的鱼雷保障过程描述
Petri网是一种由节点与弧所组成的有向图, 用托肯(Token)来模拟系统的动态行为与并发活动, 非常适合于研究“过程仿真”、“资源共享”、“竞争”等问题。它有很强的模拟能力, 其模型具有动态的随机变化的特点。为满足维修作业过程的建模需要, 在Petri网的基础上设计了维修知识描述网(maintenance knowledge description net, MKDN)。
鱼雷保障过程由许多保障作业组成, 在MKDN模型中, 用库所代表保障对象和保障资源的状态; 变迁表示保障作业的执行; 有向弧表示的网络逻辑关系代表了保障作业的约束条件; 相关保障资源则利用库所中的托肯来表示。在整个系统中采用层次分解的办法进行保障训练任务描述,利用子网来代替MKDN中的变迁或者库所。
根据相互间的逻辑关系, 又有下述5类子网:
1) 顺序子网。用以描述一系列连续的作业、动作或者状态变化。
2) 并行子网。用以表示几个在同一时间并行进行的作业、动作或者状态变化。且这些事件的结果直接决定与之相关的其他事件是否开始。
3) 选择子网。用以表示对一个连续的作业、动作或者作业对象进行多种选择。例如: 在进行某项作业前的资源选用; 或者在某个阶段, 可以根据实际情况选择要进行的作业项目等。
4) 互斥子网。在某个阶段, 只允许选择保障资源或者作业中的一个进行作业, 同时其他则被禁止发生。
5) 开关子网。根据存储在“开关”变迁中作业对象的技术状态, 允许对应的作业项目或动作使用该对象或资源。
3 鱼雷保障过程模型的建立
鱼雷保障过程建模包括了对鱼雷及其各舱段的技术状态、保障作业的执行、约束条件以及对相关保障资源的描述, 在此基础上确定保障操作过程建模规则。
3.1 资源建模
保障资源包括人员、设备工具、备件和辅助信息资料等, 这些保障资源在MKDN网中被抽象为托肯。
作为资源一般具有两种基本状态, “空闲”与“忙”状态。通过使用两个库所表示通用状态“空闲”与“忙”, 则可以通过判断对应托肯的有无来判断资源的可用与否, 如图2(a)所示。
此外, 也可以采用建立全局“资源”库所来存放所有的资源对象托肯, 如图2(b)所示。即在此库所中存在所需要的托肯, 表示相应资源可用; 若此不含有该托肯, 则表明没有所需的资源。
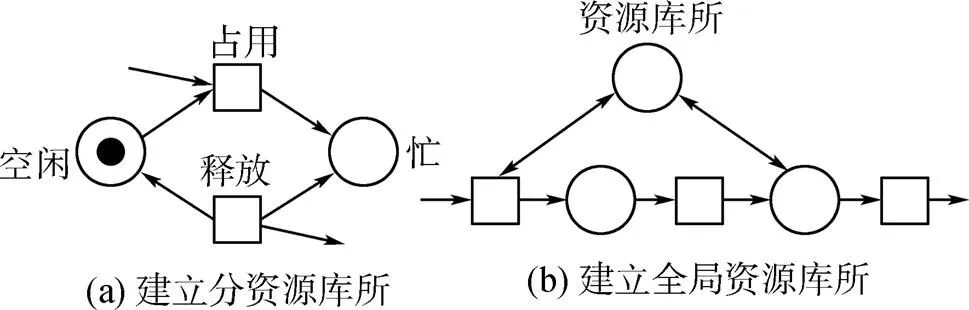
图2 资源库所建模
3.2 保障过程的约束建模
保障过程中的变迁在受保障资源制约的同时, 还与对象的技术状态密切相关。图3(a)表示保障作业只有在保障作业完成后才能开始, 图3(b)则表示保障作业需要有保障资源和才能进行。
图3 保障过程的约束建模
Fig.3 Modeling of restriction during support process
3.3 保障操作过程建模
鱼雷保障一般由关键组部件的保障作业、各系统及舱段的保障作业和总装总调保障作业等组成, 这里以鱼雷的自导系统保障作业为例。准备鱼雷任务书下达后, 首先需要组织准备总装资源对雷进行分段, 将自导段拆下; 同时, 准备自导系统保障所需的各类资源。资源一般分为不变资源和可变资源, 不变资源主要指装备、工具和人员等共享固定资源, 需要考虑是否占用; 可变资源主要指备用件及消耗品, 无需考虑占用。而对于不变资源则判断是否被占用, 只有其不被占用时才能开始保障作业。其保障作业流程见图4。
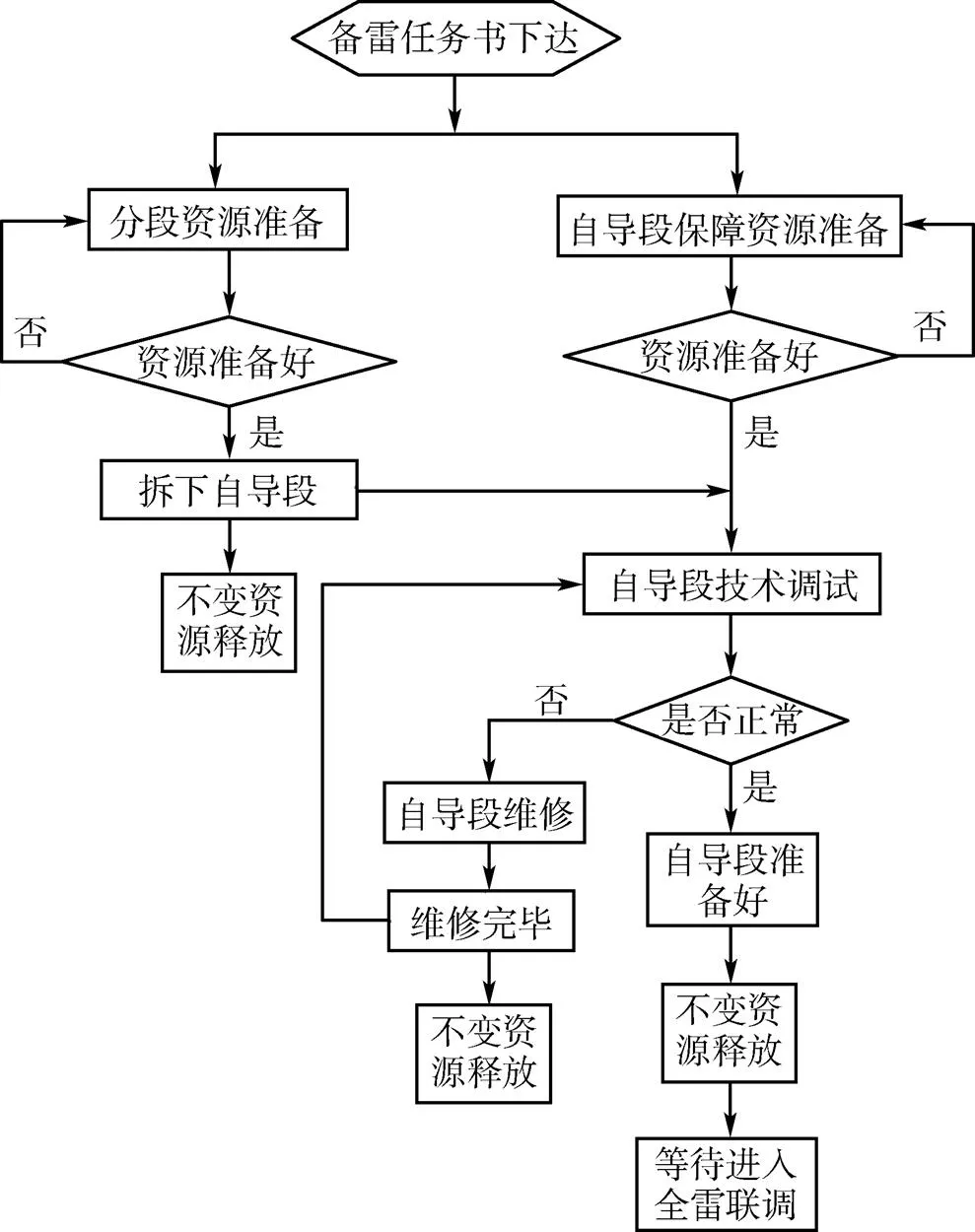
图4 鱼雷自导系统保障作业流程图
在进行过程建模时应考虑各种资源状态、约束条件和各种实际情况等操作过程因素, 其主要规则如下。1) 每个保障操作用变迁(=1, 2, …,)描述, 为每个操作单元变迁建立触发后的状态库所; 2) 库所描述的是对象的集合, 通过托肯描述对象状态的变化。可变资源, 将其状态分为“有”或“无”两种情况, 不变资源, 将其状态用“忙”或“闲”表示; 3) 全面考虑能够触发变迁所需的各种条件, 并建立“变迁解释库所”表达; 4) 将基本动作对应的变迁替换为“开关”变迁, 并给它增加几个分支。“开关”变迁存储着控制型知识, 多以产生式的形式进行表达; 5) 为库所到变迁的有向弧赋权值; 6) 针对需要展开的节点, 按照上述条目逐步展开, 进行层次化建模。
4 系统仿真流程
鱼雷保障虚拟训练系统属于过程仿真系统, 系统根据初始状态设置和保障过程变迁的触发, 不断判读网络模型中的结点状态, 刷新相关对象和虚拟场景, 直至整个保障训练任务完成, 并进行效果评估。其仿真流程如图5所示。
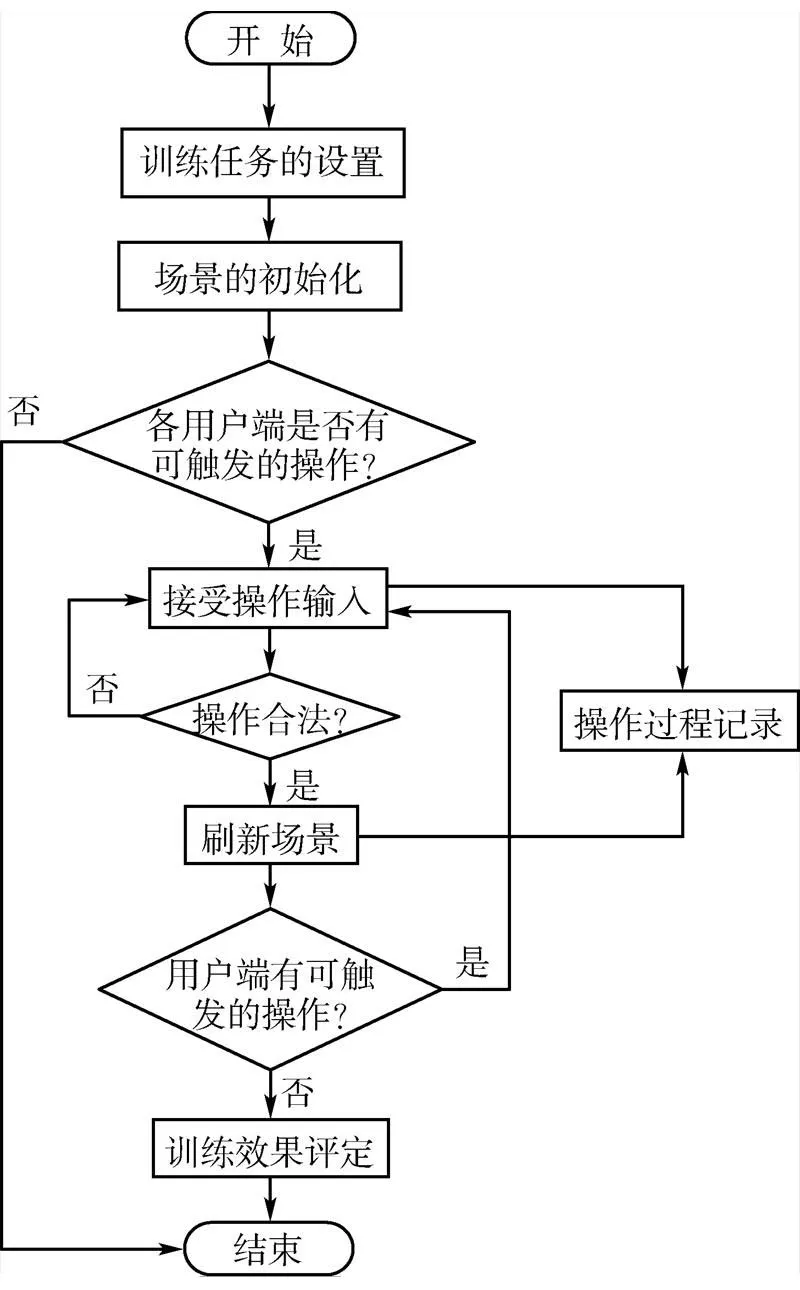
图5 系统仿真流程图
5 仿真实例
依据系统框架、过程建模规则和仿真流程, 本文利用Pipe 3.0中的Petri网建模功能建立过程模型, 利用Vega Prime对虚拟环境和虚拟人进行交互控制, 实现了对鱼雷保障虚拟训练系统的仿真。图6为建立某系统保障作业过程Petri网模型, 图7为在虚拟环境中的某一操作仿真截图。
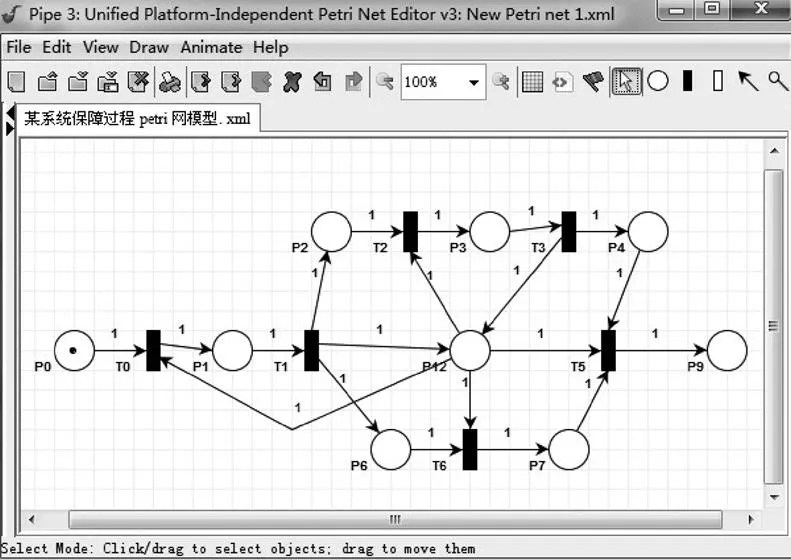
图6 某系统保障作业过程Petri网模型
6 结束语
本文针对鱼雷保障虚拟训练系统的构架, 深入研究了基于MKDN的鱼雷保障过程描述, 论述了鱼雷保障过程建模方法和系统仿真流程。仿真实例证明, Petri网在构建鱼雷保障作业过程的逻辑关系中具备很强的优势, 对开发复杂装备虚拟训练系统有着直接现实意义。
[1] 江志斌. Petri网及其在制造系统建模与控制中的应用[M]. 北京: 机械工业出版社, 2004.
[2] 郝建平. 虚拟维修仿真理论与技术[M]. 北京: 国防工业出版社, 2008.
[3] 刘鹏远, 李瑞华, 马立元.复杂武器系统虚拟操作过程建模技术研究[J].军械工程学院学报, 2007, 19(6): 12-16.
[4] 杨军. 某型炮射导弹虚拟检测维修训练系统总体技术研究[J]. 军械工程学院学报, 2006, 19(6): 20-24.
[5] 江志斌. Petri网及其在制造系统建模与控制中的应用[M]. 北京: 机械工业出版社, 2004.
[6] 潘飞, 王丙武, 逄洪照. 基于仿真方法的鱼雷保障性参数优化[J]. 舰船科学技术, 2011, 33(9): 81-85.Pan Fei, Wang Bing-wu, Peng Hong-zhao. Supportability Parameters Optimization Research Based on Simulation for Torpedo[J]. Ship Science and Technology, 2011, 33(9): 81-85.
[7] 周广庆, 王睿. 基于EXTEND的鱼雷技术准备过程建模与仿真[J]. 舰船电子工程, 2010, 30(5): 125-128.Zhou Guang-qing, Wang Rui. Modeling and Simulation of Torpedo′s Technical Guarantee Based on EXTEND[J]. Ship Electronic Engineering, 2010, 30(5): 125-128.
(责任编辑: 许 妍)
A Virtual Training System for Torpedo Support Based on Petri Net
ZHANG Qi, HUANG Bo, MA Zhi-feng
(1.Naval Armament Department, Beijing 100073, China; 2. Department of Missile and Weapons, Naval Submarine Academy, Qingdao 266042, China; 3. 92840Unit, The People′s Liberation Army of China, Qingdao 266405, China)
A scheme of virtual training system for torpedo support is proposed based on virtual prototype and simulation control technology to satisfy the training requirement of torpedo support. The torpedo support process based on maintenance knowledge description Petri net is discussed in detail. The modeling principle of torpedo support process is obtained by analyzing support resource, constraint condition and operational process, and then the simulation flow of the support training system is designed. Simulation indicates that Petri net can perfectly solve the restriction problem of resource and work result on operational process in the system.
torpedo support; virtual training; Petri net; simulation
TJ630.7
A
1673-1948(2012)06-0454-04
2012-04-18;
2012-08-01.
张 起(1976-), 男, 硕士, 研究方向为鱼雷武器系统.
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
电子器件(2021年1期)2021-03-23 09:24:02
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
中国粮食经济(2018年12期)2018-12-30 08:25:42
中国粮食经济(2018年10期)2018-12-30 06:32:16
中国粮食经济(2018年11期)2018-12-27 08:58:42
人大建设(2017年6期)2017-09-26 11:50:43
华侨大学学报(自然科学版)(2014年4期)2014-10-11 06:23:42
吉林大学学报(工学版)(2014年1期)2014-04-12 00:32:08
