高性能无刷直流电机数字稳速控制系统实现
2012-09-18 02:33:02李伟忠
上海航天 2012年1期
李伟忠,姚 勤
(中国人民解放军海军驻上海地区航天系统军事代表室,上海 201109)
0 引言
随着数字信号处理器(DSP)的出现和控制技术的发展,用于运动控制的伺服系统也不断向全数字化方向发展。BLDC电机因其体积小、结构简单、可靠性高、输出转矩大等特点,广泛用于伺服控制领域[1-6]。但采用传统比例积分微分(PID)控制器有伺服电机控制系统的系统技术参数会下降,跟踪性能差的缺点,而且当存在外干扰信号时系统的精度和稳定性会降低。
本文采取DSP数字处理器,对一种实现基于变参的积分分离PI控制方案的实现进行了研究。
1 设计方案
该控制系统是一个基于速度闭环数字式控制系统,主要由通信、控制用DSP、信号隔离、功率放大和信号整形等电路组成。控制系统原理如图1所示。
在电路中,电机位置霍尔信号经滤波整形输入DSP捕获端口,DSP捕获相应中断信号由内部计数器分析获得电机转速信号。比较当前转速与给定速度信号,得出当前转速的静差值,再通过一定的解算回路计算输出电机驱动脉宽调制(PWM)信号。PWM信号经过隔离放大,驱动无刷电机转动。

图1 控制系统原理Fig.1 Principleof control system
控制参数的调整和电机换向控制通过DSP软件控制实现。驱动板有JTAG在线程序上传调试接口,实现控制软件下载固化。在控制电路设计过程中,采用软件的参数实现方式,通过高效率的集成功放,可大幅提高系统的性能。
2 硬件电路设计原理
数字控制器是实现无刷稳速直流电机驱动电路速度闭环的关键部件,其主要任务是捕获BLDC电机的霍尔信号获得当前电机转子的位置信号以控制电机旋转换相,同时根据捕获信号的时间差值可计算出当前电机的旋转速度,将获得的电机旋转速度值与标称值进行比较,由稳速闭环的控制律给出控制所需的PWM信号,经功率驱动电路功率放大后产生推动电机所需电流。
硬件电路中数字控制器采用TI公司的TMS320F2812(DSP)芯片,其中PWM信号周期由DSP编程产生。由设计原理分析可知:PWM周期需大于回路信号的响应频率,使电机不响应脉动电压,故频率越高就越接近线性控制。但综合考虑控制器运算周期、光耦器件与功率器件开关特性,取PWM载波周期40 k Hz,可满足驱动电路高性能要求。
2.1 通信电路
通信电路监测CAN总线的差分电平信号,将其转为与DSP兼容的TTL信号,由DSP自带CAN协议处理模块分析提取数据。通信电路原理如图2所示。

图2 通信电路Fig.2 Circuit of communication
2.2 控制DSP电路
数字控制DSP处理电路是数控驱动电路的核心处理部分,DSP采用TI公司TMS320F2812处理器,有12位的AD采样器16路和事件管理器2个,每个事件管理器可产生驱动1个直流电机所需的16位PWM信号。因此1个DSP芯片可控制2个电机。驱动器控制DSP电路接收CAN总线信号,根据协议处理给出当前稳速系统速度信号。另从捕获口采样电机霍尔信号,算得当前电机速度信号。通过内部软件处理,输出电机控制所需PWM信号。
2.3 信号隔离电路
信号隔离电路的功能主要是隔离控制器电源与功率端电源,并进一步放大PWM信号,推动功率管工作,获得电机的驱动电流。隔离电路使用6路光耦器件,可同时传输三相桥所需的驱动信号1个。考虑DSP的驱动能力有限,输出信号通过54LS245器件驱动光耦。光耦输出级使用反向器进行信号反向,同时对光耦的跳变边沿信号进行整形,提高系统的抗干扰能力。其电路如图3所示。

图3 信号隔离电路Fig.3 Signal isolation circuit
2.4 功率放大电路
功率放大电路将PWM信号放大,驱动电机旋转,其原理如图4所示。
2.5 信号整形电路
被驱动电机的功率驱动信号与位置反馈信号用同一电缆传输,易引起信号干扰。信号整形电路将对位置反馈信号进行滤波整形,其原理如图5所示。
3 软件设计
DSP的软件编程以C语言为主并辅以适当的汇编语言。通过捕获单元的捕获信息计算电机转速并与通过CAN总线获取期望转速进行比较,获得转速偏差,由控制算法进行解算,输出相应的控制信号给驱动器,实现对执行机构的控制。

图4 功率驱动电路Fig.4 Power drive circuit

图5 信号整形电路Fig.5 Signal modulation circuit
驱动电路控制软件由主体控制、霍尔捕获与转速计算、事件管理驱动和控制律解算模块组成,如图6所示。

图6 软件结构Fig.6 Softwarestructure
4 控制算法与仿真结果
传统型稳速控制系统由于控制算法简单固定,控制参数调整范围较小,当外界条件不断变化时难以实现高精度稳速控制,且在恶劣的力学环境中的动态响应差,会出现多次超调振荡,严重影响系统性能。采用DSP数字式控制实现的高性能BLDC稳速控制系统,利用无刷电机驱动专用处理DSP芯片F2812,整个系统的速度控制快且稳,可实现高精度高动态控制。
控制系统采用DSP控制器,使驱动电路稳速控制回路算法实现有较大的灵活性。因整个系统为速度控制系统,对快速性和稳态精度均有高要求,故可采用PI算法进行控制,通过比例项提高系统快速性,积分项保证系统稳态精度。但在传统PI调节器中,积分项虽可消除静差,但当有较大扰动或输入量大幅变化时,由于系统的惯性和滞后,在其作用下,常会产生较大的超调和长时间的波动。因此,为改善控制系统的性能,须改进积分项,本文采用积分分离、抗积分饱和与增益变参技术。
a)积分分离
积分分离控制的要点是:当被控制量与设定值偏差较大时,取消积分作用以避免因积分作用使系统稳定性降低,超调量增大;当被控制量接近给定值时,引入积分项以消除静差,提高控制精度。有

式中:u(k)为控制器输出的控制量;Kp为比例增益系数;T为系统的采样周期;Ti为积分时间常数;e为偏差;k为采样数;β为积分项的开关系数,且

此处:E为e(k)的门限值(即积分分离值)。实际使用中,E应根据具体要求确定。E值过大,无法实现积分分离;E值过小,一旦被控量无法跳出积分分离区,仅进行比例调节,将会出现静差。
b)抗积分饱和
如执行机构已达极限状态,仍不能消除偏差时,由于积分作用,尽管计算PI差分方程式所得结果继续增大或减小,而执行机构已无相应的动作,此为积分饱和。当出现积分饱和时,必然引起超调量增大,控制品质变变差。本文用有效偏差法和积分分离可对运算出的控制量u(k)进行限幅,即

c)增益变参
为提高系统快速性和保证稳定性,对PI控制器中的增益比例项进行实时调参。
采用以上控制算法,可得仿真结果如图7(a)所示。由图可知:上升时间tr=0.139 5 s,超调量0%,静差0 r/min,采用以上控制算法,系统的快速性和稳定性较佳。为检验系统的抗干扰性和鲁棒性,在系统达到稳态转速16 500 r/min时,加入速度干扰1 500 r/min,仿真响应如图7(b)所示。由图可知:在时间60 ms内,系统能恢复至要求的转速(16 500±165)r/min范围内,鲁棒性良好。

图7 稳速控制仿真结果Fig.7 Simulation result of steady speed control
5 实验结果
对数字与模拟两种PID控制方式进行实验。加电起转后的速度响应如图8所示。由图可知:起动过程中,数字PID控制电路的电机起动过程较快较稳,无振荡超调过程。起动时间和稳态精度较好,满足设计要求。具体结果见表1。
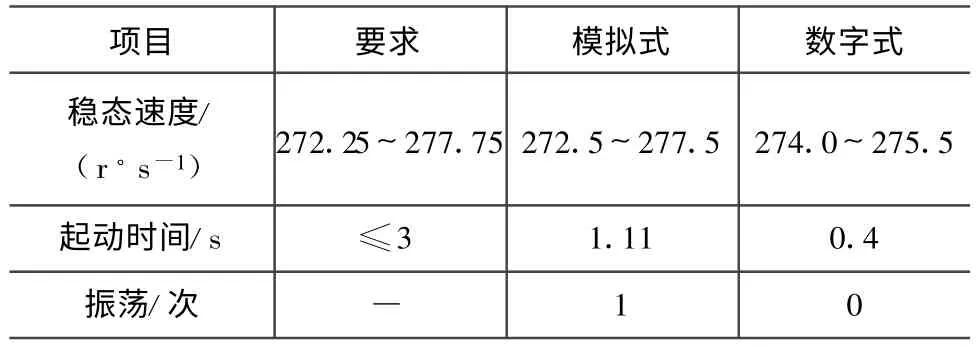
表1 不同控制类型速度响应Tab.1 Speed respond of different types of control

图8 不同控制类型速度曲线响应Fig.8 Speed response of different types of control
系统刹车试验试验结果如图9所示。由图可知:刹车后电机的转速下降约11 r/s,稳态转速264 r/s,恢复至稳态速度的时间约60 ms,无超调和振荡,满足设计要求。

图9 刹车试验结果Fig.9 Experimentation reslut of brake
对系统进行峰值加速度为100g的冲击试验,结果如图10所示(此处g为重力加速度)。由图可知:冲击过程中,数字式产品所受影响较小,下降速度快,恢复过程快而稳,具体结果见表2所示。

表2 不同控制类型冲击响应Tab.2 Impact response of different types of control
6 结束语
本文基于DSP控制电路对BLDC电机数字稳速控制系统的传统PI控制器进行了改进。用电机控制专用处理器DSP TMS320F2812芯片,由捕获采集电机霍尔位置信号,在DSP内部计算电机转速,解算得电机驱动信号,完成电机的速度伺服控制。试验结果表明:采用数字分离PI控制的系统动、静态性能较佳,提高了控制精度,增加了系统在恶劣环境中工作的可靠性,使系统有较强的鲁棒性。

图10 冲击速度Fig.10 Speed of impact
[1]郭雪梅,贾宏光,冯长有.直流无刷电机位置跟踪的模糊PID控制[J].长春理工大学学报(自然科学版),2008,31(1):31-33.
[2]姚 金,王彦梅.新型DSP芯片TMS320F2812在电机控制系统中的设计及应用[J].微型电脑应用,2007(10):31-34.
[3]苏奎峰,吕 强,耿庆锋,等.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[4]罗立明.基于DSP的电机控制器CAN通讯及监控系统设计[D].武汉:武汉理工大学,2006.
[5]王 滨,高永生,张文明.基于TMS320F2812的新型无刷电机控制器设计[J].电子测量技术,2007(8):107-109.
[6]董期林,张淑梅.基于DSP的直流电机数字控制系统[J].微电机,2006(5):62-64.
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
汽车实用技术(2022年7期)2022-04-20 11:45:04
核科学与工程(2021年4期)2022-01-12 06:30:04
煤气与热力(2021年4期)2021-06-09 06:16:54
房地产导刊(2020年11期)2020-12-28 01:32:30
中华戏曲(2020年1期)2020-02-12 02:28:18
铁道通信信号(2019年4期)2019-10-10 03:42:56
制造技术与机床(2017年6期)2018-01-19 02:41:07
通信电源技术(2016年1期)2016-04-16 04:57:31
电源技术(2015年9期)2015-06-05 09:36:06