采用工业以太网的直流电机控制系统
2012-09-07 07:31洪雪梅郑力新
华侨大学学报(自然科学版) 2012年5期
洪雪梅,郑力新
(华侨大学信息科学与工程学院,福建厦门361021)
采用工业以太网的直流电机控制系统
洪雪梅,郑力新
(华侨大学信息科学与工程学院,福建厦门361021)
在原有直流电机控制实验系统的基础上,采用泓格I-8837嵌入式控制器将工业以太网由信息层延伸到控制层和设备层,完成PC机和现场控制设备间的通信.借助以太网实现对直流电机的启动、调速和停止的远程监控,同时应用扩充临界比例法对比例-积分-微分(PID)参数进行工程整定.测试结果表明:系统具有准确、稳定和运行可靠的特点,符合网络实验室的要求.
直流电机;以太网;嵌入式控制器;远程监控;PID参数
现场总线也称现场网络,它使自控设备与系统步入了信息网络的行列,为其应用开拓了更为广阔的领域.然而,现场总线这类专用实时通信网络存在着成本高、速度低和支持应用有限等不足,再加上总线通信协议的多样性,使得不同总线产品之间不能互连、互用和互操作,极大地限制了现场总线工业网络的进一步发展[1].传统的控制系统在信息层大都采用以太网,而在控制层和设备层则采用不同的现场总线或其他专用网络[2].本文在原有直流电机控制实验系统的基础上,通过工业以太网来实现PC机和现场控制设备间的通信.
1 直流电机控制原理分析
直流电机的控制是一种过程控制,一般采用PID参数进行自整定.PID控制器把收集到的数据和参考值进行比较后,用于计算新的输入值,让系统的数据达到或者保持在参考值.与其他简单的控制运算不同,PID控制器可以根据测量值和设定值的差值来调整控制器输出值,使得系统更加准确,更加稳定[3].图1为直流电机控制原理框图.
由直流电机稳态时电枢回路的基尔霍夫电压定律(KVL)方程可得

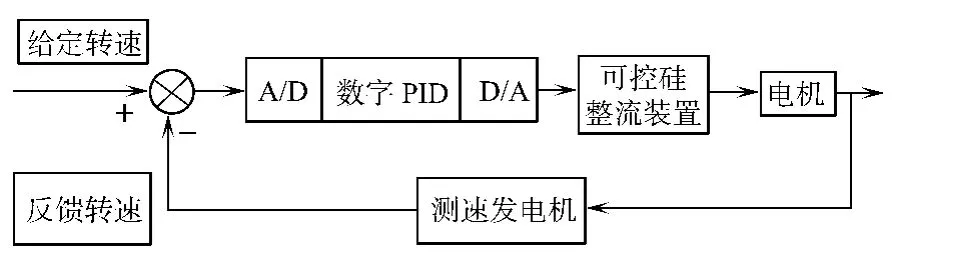
图1 直流电机控制原理图Fig.1 Diagram of DC motor control
式中:Ud为加在直流电机两端的电压;Ce为跟电机自身有关的常数;Ø为电机的励磁强度;Id为电枢电流;Rd为电枢电阻.由此可知,改变加在电机电枢两端的电压即可调节电机的转速[4].为了更好地驱动直流电机,采用一种三相全控整流桥的可控硅整流装置,对PID计算出的控制电压进行功率放大.该装置的输出电压U0=2.34 U2cosθ.其中,U2为三相电中每相电压的有效值;θ为导通角.
由于导通角受PID输出电压Uc控制,且它们之间成反比关系,即Uc越大,θ越小.因此,在忽略非线性的情况下,可控硅整流的输出电压可近似为U0=k Uc.其中,k为一常数.
2 硬件设计
图2为系统硬件原理图.选用台湾泓格科技公司生产的I-8837嵌入式控制器作为控制器,利用其自带的扩展插槽和串口、以太网、CAN bus和FRnet等多种总线进行功能扩充.I-8837嵌入式控制器拥有可编程特性,可以利用它来做前端智能数据采集、运行控制程序、向直流电机发出控制电压;同时,可以向上位机传送直流电机的运行数据来反映直流电机的运行情况,通过连接运行IS-aGRAF软件的主机来实现整体监控.
I-8017 H模块作为系统的模拟量输入模块,反映直流电机转速的电压输入到控制器I-8837.通过模拟量输出模块I-8024将PID运算的控制电压输出到可控硅装置,以控制加在电机电枢上的电压.
可控硅整流装置采用三向桥式整流技术,对D/A的输出电压进行功率放大,它将输出一个控制电压(Ud)加在电机电枢上.这个输出电压是受模块I-8024的输出电压(Uo)(即PID的输出)控制的,可近似为Ud=k Uo,k为一比例常数.直流电机的转速测量采用测量变送装置,并将电机的转速转化为电压,由模块I-8017 H输入到控制器,反馈系数k=0.005 713 3.
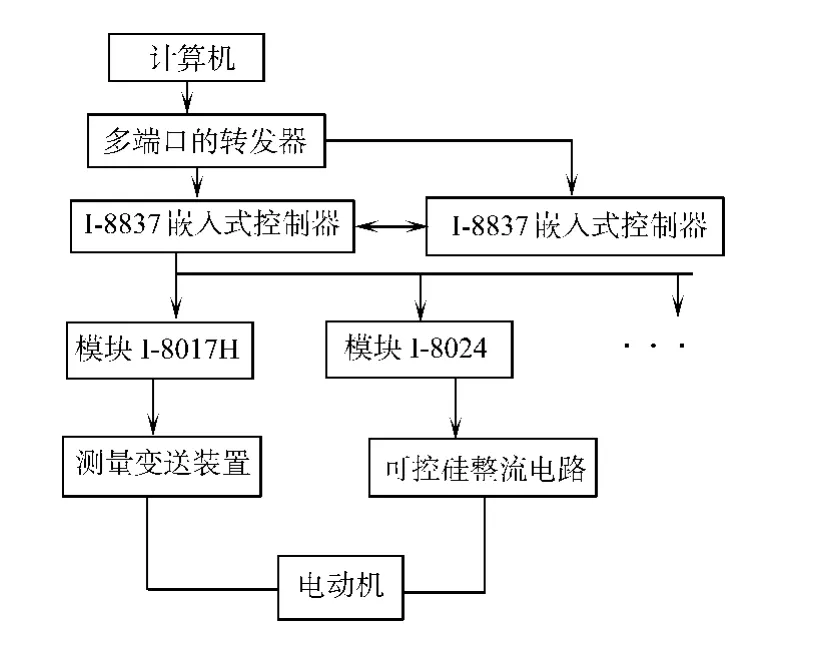
图2 直流电机控制系统硬件原理图Fig.2 Diagram of the hardware of DC motor control system
3 软件设计
3.1 主程序设计
I-8837是以ISaGRAF为控制软件核心的嵌入式控制器.ISaGRAF由两大部分组成:在PIE等实时现场设备或I/O卡件上运行的核心软件和在以太网上运行的工作站软件平台.ISaGRAF生成独立于硬件的可执行代码,从工作站平台下装到现场设备后实现对过程设备的监测、控制和管理.
考虑直流电机控制系统的特点,采用阶梯图LD语言和结构化文字ST两种语言进行混合编程.其中:Speeds程序用LD语言编程,用于计算电动机的实际转速;Main程序用LD语言编程,用于电动机控制主程序;Pid_out程序用LD语言编程,用于对误差E(k)进行PID运算,计算控制电压;Showturn程序用LD语言编程,让人机界面上显示电动机转动的程序;End程序用ST语言编程,用于结束程序并进行相关变量复位.
3.2 人机界面的设计
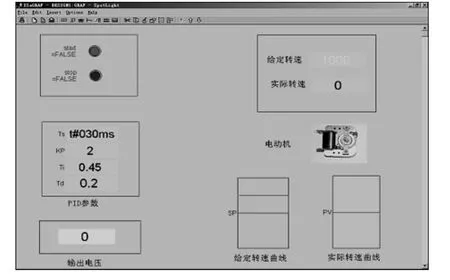
图3 直流电机控制系统的人机界面Fig.3 Human-machine interaction of DC motor control system
为了实现真正意义上的远程监控,系统还需要构建一个简洁、直观的人机界面.利用ISAGRAF的注视点工具来编辑该界面.ISaGRAF注视点工具允许用户定义监视列表,在调试时以示意图或列表形式显示,图形项必须与ISaGRA项目的变量相链接,图形总是“在线”定义和演示.要强制变量的值,用鼠标在图形或列表中双击相应项,或选择它后按ENTER键.在程序运行时可单击Debugger窗口的tools菜单下的spotlight选项进入界面编辑窗口来编辑人机界面,如图3所示.
4 系统调试及PID参数的整定
利用I-8837控制器可以轻松地将各种具备RS-232/485/422接口的设备接入以太网,方便对控制器进行远程设置及装载各种程序.但在实现这些功能之前需要对控制器的IP地址,Mask和gateway进行设定,这关系到整个系统的正常运行.设置的关键是要完成以下3个步骤:(1)运行ISAGRAF/800/Driver/7188x.exe;(2)用RS232将电脑和I-8837控制器的COM1端口相连;(3)先关闭控制器电源,用导线将I-8837控制器的INIT和INIT-COM短接,再开启电源.
输入SEPIP 192.168.201.52来设定IP地址,要特别注意该地址的前3位数据必须与计算机的一致,否则I-8837无法正常通信.同理,输入SETMASK 255.255.255.255设置控制器的MASK;输入SETGATEWAY 192.168.0.1设置控制器的gateway.
用比例调节器取代PID调节器,其他保持不变,构建直流电机控制系统闭环调速.系统运行时在界面中逐渐增大Kp直到电机转速开始发生震荡,此时Kp即是Ks(Ks=26).同时,借用数字示波器测得震荡周期Ts=1.2 s.
控制度是定义数字调节器和模拟调节器所对应过度过程误差的积分之比.在这里,控制度选择为1.2,此时T/Ts=0.043,Kp/Ks=0.47,Ti/Ts=0.47,Td/Ts=0.16.经计算,T=50 ms,Kp=12,Ti=0.56,Td=0.192.
将系统由比例控制改为PID控制,PID参数设置如上所计算出来的值,再进行闭环实验,并根据PID参数对控制系统性能(稳定性、准确性、快速性等)的影响对计算出来的各参数进行微调.经过反复实验与调整,PID各理想参数整定为Kp=2,Ti=0.45,Td=0.2,T=30 ms.
5 结束语
在原有直流电机控制实验系统的基础上,应用工业以太网对该实验系统进行改进,实现真正意义上的远程监控和转速的PID控制.经过反复测试,系统运行可靠,有利于提高网络的实验教学.
[1] 王荣莉,雷斌.工业以太网技术的现状与发展[J].自动化博览,2004(4):63-65.
[2] 冉全,肖德宝,赵振华.工业以太网的系统设计方案研究[J].武汉理工大学学报:信息管理与工程版,2003,25(2):8-11.
[3] 何克忠,李伟.计算机控制系统[M].北京:清华大学出版社,1998:4.
[4] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003:7.
Study on the Control Systems of DC Motor Based on Industrial Ethernet
HONG Xue-mei,ZHENG li-xin
(College of Information Science and Engineering,Huaqiao University,Xiamen 361021,China)
Based on the control experiment of DC motor,the application of industrial ethernet is expanded from information layer to control layer and equipment layer by using ICP DAS I-8837 embedded controller,and then the communication between PC and the on-site control equipment is achieved.With the ethernet,the operating conditions of DC motor for the start,the speed control and the stop can be remote monitored,and then the PID parameters can be adjusted by applying the extended critical ratio method.The test results show that the proposed system has exact,stable and reliable characteristics,in line with the requirement of network laboratory.
DC motor;ethernet;embedded controller;remote monitor;PID parameter
TP 393.11
A
(责任编辑:钱筠 英文审校:吴逢铁)
1000-5013(2012)05-0506-03
2011-10-07
洪雪梅(1974-),女,实验师,主要从事智能控制技术和生物信息学的研究.E-mail:hxmei@hqu.edu.cn.
教育部科研重点项目(207145);福建省教育厅高等学校第二批网络课程研制项目(2004年度)
猜你喜欢
大电机技术(2022年5期)2022-11-17
火力与指挥控制(2022年5期)2022-07-25
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
电子制作(2017年1期)2017-05-17
铁道通信信号(2016年1期)2016-06-01
广东石油化工学院学报(2016年6期)2016-05-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
铁路通信信号工程技术(2015年4期)2015-02-28