
电励磁风力发电系统机侧控制策略研究
2012-08-28 06:49:18霍现旭胡书举许洪华
电机与控制应用 2012年3期
霍现旭, 胡书举, 许洪华
(1.中国科学院电工研究所,北京 100190;2.中国科学院研究生院,北京 100049)
0 引言
电励磁同步电机具有功率因数高且可调、过载能力强、转动惯量小等优点,在水电、火电中得到了广泛应用。德国Enercon等公司已经将电励磁同步发电机应用于风电系统中,国内湘电等一些公司也在进行电励磁风力发电系统的研制。目前国内的主流机型为使用双馈感应发电机(Double-Fed Induction Generator,DFIG)的双馈型风电系统和使用永磁同步发电机(Permanent Magnet Syndronous Generator,PMSG)的直驱型风电系统[1]。相比于DFIG,电励磁同步发电机具有功率因数高、弱磁区转矩特性好等优点;相比于PMSG,电励磁同步发电机具有无需永磁材料、无失磁风险、可调励磁磁通、造价相对便宜等优点,显示了一定的优越性能。
同步电机的矢量控制系统可分为转子磁场定向控制、定子磁场定向控制、气隙磁场定向控制等方式[2]。转子磁场定向控制系统结构简单,定向容易,只需检测转子轴线位置即可实现定向,一般用于永磁同步电机控制中。文献[3]等采用了定子磁链定向控制,文献[4-5]等采用气隙磁链定向控制。在不同的控制目标和控制方式下,定子磁场定向控制和气隙磁链定向控制对于转子激磁电流、功率因数、系统稳定性等方面影响不同,各有优劣。本文采取气隙磁链定向矢量控制系统。
气隙磁场定向控制能够得以有效实现的关键,在于电机磁链信息的准确获取。对电励磁同步电机磁链观测常用的方法有电流模型、电压模型和混合模型。电流模型在低转速时能够快速跟随给定,缺点是对电机参数敏感,电机参数受外界影响变化时,模型不能很好的工作。传统的电压模型是对反电动势直接积分,为开环模型,积分累积误差和直流偏移误差较大。为了消除这些误差,部分文献采用了低通滤波器代替积分环[6]、饱和双反馈积分器[7]、MT轴系感应电势辨识[8]等策略加以改进。
本文以电励磁同步发电机为研究对象,针对其在风力发电系统中的应用,对气隙磁场定向矢量控制进行了研究,对气隙磁场定向中的磁链观测和控制方案进行详细阐述,并给出了仿真结果。
1 气隙磁场定向下的同步发电机数学模型
为了实现电机转矩和磁场的解耦控制,通过坐标变换将同步发电机的abc坐标系等效变换到同步旋转MT轴坐标系中,其中,同步旋转轴线M轴与气隙磁链矢量ψδ重合。将定子电流is沿MT轴分解为激磁分量ism和转矩分量ist,分别控制便可实现解耦,简化同步电机的控制。不同轴系的相对位置关系及矢量关系图如图1所示。
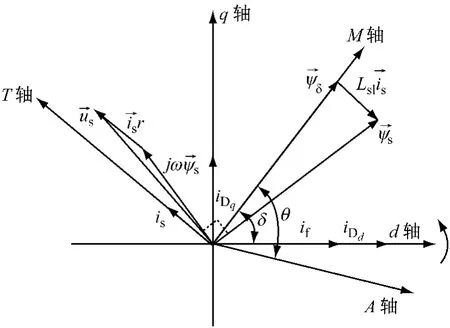
图1 电励磁同步电机矢量图
在气隙磁链定向控制中,采用电动机惯例,坐标变换采用恒幅值变化,可得到气隙磁链表达式如下:
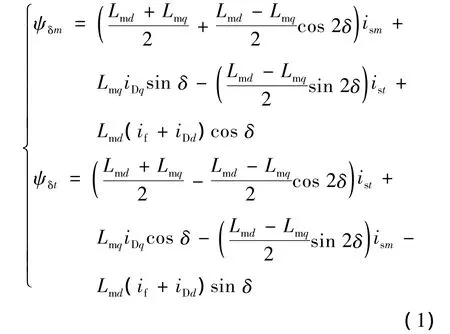
式中:ψδm、ψδt——M、T轴磁链分量;
Lmd、Lmq——d、q坐标系下的d、q轴互感;
ist、ism——M、T轴定子电流分量;
if——励磁电流;
iDd、iDq——d、q轴阻尼电流分量;
δ——功角,即转子与气隙磁链之间的夹角。
根据气隙磁链定向原理可知 ψδt=0。从式(1)可看到,阻尼绕组只在动态时对气隙磁链产生影响,且凸极效应对磁链幅值的影响很弱,定子电流磁场分量ism和转子激磁电流if是气隙磁链的主要作用量。因此,在稳态时,可以忽略凸极效应影响和阻尼绕组的影响,气隙磁链的表达式简化为

MT轴系下电励磁同步电机的电压方程为

其中:ust、usm——M、T轴定子端电压分量;
Rs、Lsl——定子绕组电阻和漏电感;
ω——同步坐标系旋转角速度。
转矩方程为

2 同步发电机气隙磁链观测
传统的电压模型面临着积分零点漂移的问题。文献[3]提出了一种采用MT轴系感应电势辨识磁链的方法,有效解决了传统电压模型中存在的问题。这种方案的控制框图如图2所示。
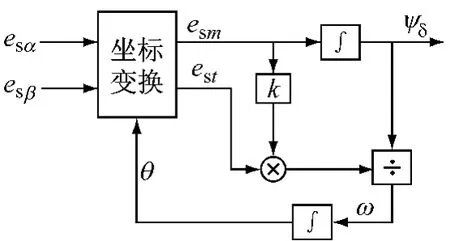
图2 基于MT轴系的气隙磁链观测
在MT轴系坐标系下,假设气隙磁链产生的感应电势与T轴不重合,定子感应电势矢量在MT轴上分解为转矩分量est和磁场分量esm,则感应电势方程为

根据式(5),可以得到:
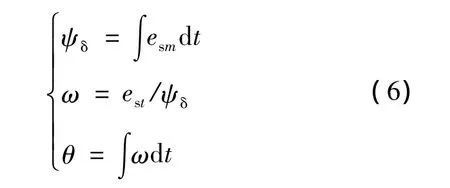
基于MT轴系感应电势观测气隙磁链的积分器处于闭环中,漂移能够被抑制,可以直接输出气隙磁链的幅值和相位,也为电励磁同步电机无速度传感器控制提供了转速和角度值。
3 矢量控制策略
风力发电系统中,变流器接收的主控命令为转矩命令,依据式(4)可得到转矩参考电流。根据所设定的发电机功率因数,输入气隙磁链幅值和发电机的转矩参考电流,可得到定子励磁参考电流。本文中,设定电机内功率因数为1,即定子电流与气隙磁链垂直。根据式(3),定子的MT轴系电流经过PI调节器,再加上前馈补偿项,就可以得到MT轴的参考电压矢量ust和usm。再经过坐标变换得到三相参考电压usa、usb和usc,最后进过SVPWM算法得到发电机的控制信号。
在电励磁同步电机的气隙磁链矢量控制中,须保持气隙磁链幅值的恒定,即保持激磁电流iμ恒定。根据式(2),稳态时气隙磁链主要与定子M轴电流ism和转子激磁电流if有关,动态时还与阻尼绕组电流iD有关。由于控制中定子电流与气隙磁链垂直,故有ism=0。稳态时,阻尼绕组电流为0,由式(2)可看到此时气隙磁链仅与励磁电流和功角有关。气隙磁链参考值与磁链观测器所得到的气隙磁链幅值的差值送入PI调节器,得到所需要的激磁电流参考值。由于定子M轴电流ism已确定,转子激磁电流参考值也可以唯一确定。
根据上述原理可得到机侧变流器的整体控制框图,如图3所示。
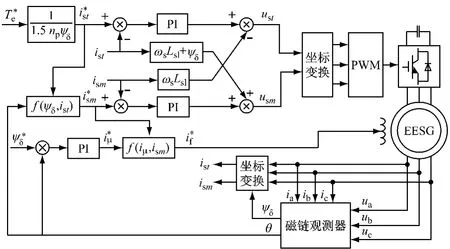
图3 电机侧变流器控制原理图
4 仿真验证
基于上述工作原理,在MATLAB/Simulink 7.11中搭建了电励磁同步发电机与电机侧变流器的仿真系统。为模拟风速变化对电流跟随能力的影响,转速给定由初始的100 rad/s在0.3 s时斜坡给定至150 rad/s。为了验证实际工况中主控给定的转矩变化对电流变化的影响,转矩给定由初始值时的 -135 N·m在 0.6 s时变为-225 N·m。磁链参考幅值设定为1.5 Wb。仿真中电机的参数如下:额定功率31.3 kW、定子电阻0.214 Ω、定 子 漏 感 1.025 mH、直 轴 电 感24.36 mH、交轴电感 11.67 mH、极对数2。
图4为磁链观测器模型得到的磁链幅值和相位的变化曲线。由图可看出,初始经过短暂的暂态后,相位和幅值很快收敛至稳定;在速度发生变化后,磁链观测模型能很快进行跟踪,并且转矩突变对其影响不大,显示了磁链观测器良好的动态性能和鲁棒性。该磁链观测器在系统的整个运行范围内能够保持幅值恒定,消除了由于直流偏置和积分累积导致的误差。
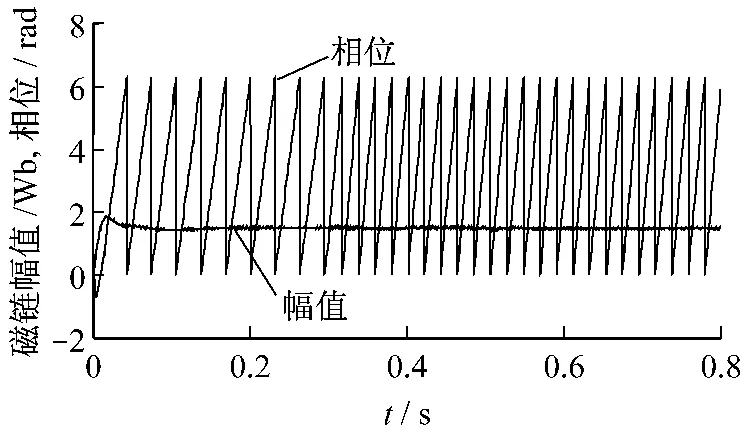
图4 磁链幅值和相位观测值
图5和图6分别为电机转速和转矩的变化曲线,图6给出了参考转矩和实际转矩的对比曲线。图7是定子转矩电流ist和激磁电流ism在转速和转矩突变情况下的变化曲线,图8为相应的定子三相电流波形。由图5可看出,在参考转矩突变时,系统的实际电磁转矩能够很好地进行跟踪,并且脉动很小。从图6中可看出在0.3 s转速发生变化时,定子转矩电流和激磁电流脉动很小;在转矩发生突变时,定子的转矩电流ist也发生突变,验证了在磁链幅值不变的情况下,电磁转矩与转矩电流成正比的关系;整个过程中,定子的激磁电流ism基本为0,即定子电流与气隙磁链基本保持垂直,维持内功率因数为1不变。
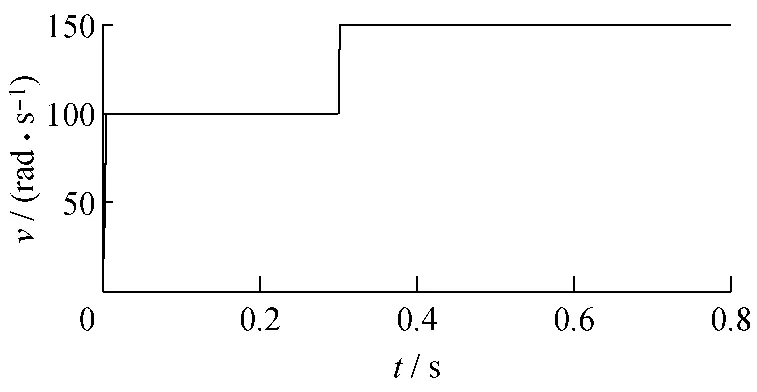
图5 电机转速曲线
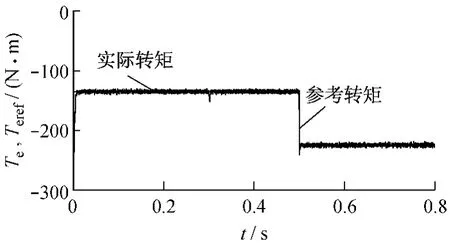
图6 参考电磁转矩和实际电磁转矩曲线
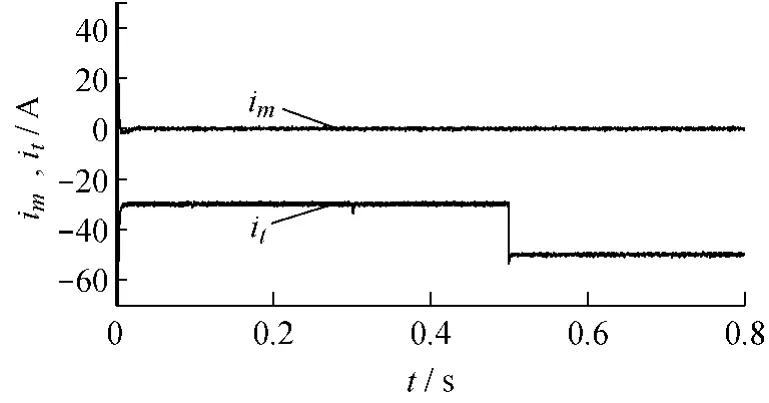
图7 MT轴电流波形
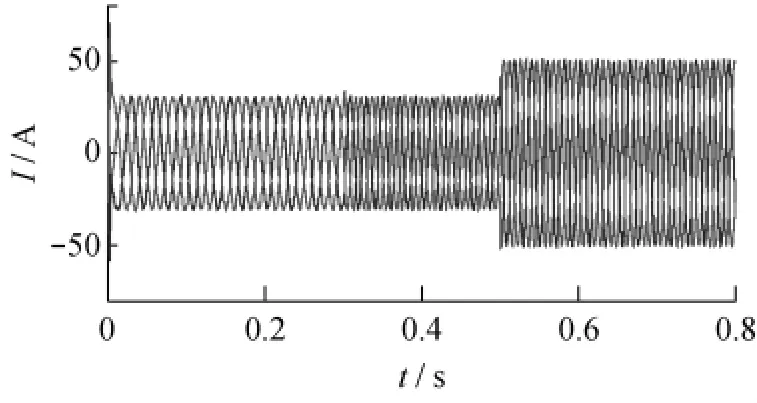
图8 定子三相电流
5 结语
本文针对电励磁同步发电机在风力发电中的应用,提出了机侧的控制策略,并对控制中的磁链观测和控制策略进行了详细分析,通过仿真验证了控制策略的有效性。由仿真可知,在风速和转矩突变时,磁链观测器能准确观测气隙磁链的幅值和相位,发电机能够稳定运行,控制效果良好。
[1]牟迈.风力发电机市场品牌集中度趋高,质量稳定性仍待提升[J].风能,2011(5):42-44.
[2]李崇坚.交流同步电机调速系统[M].北京:科学出版社,2006.
[3]HOFMANN H F,SANDERS S R,EL-ANTABLY A.Stator-flux-oriented vector control of synchronous reluctance Machines with maximized efficiency [J].IEEE Transactions on Industrial Electronics,2004,51(5):1066-1072.
[4]PENG L Q,XIE L,WU F,et al.Field-oriented control of synchronous motor based on adaptive extended Kalman filter[C]∥IEEE International Conference on Cloud Computing and Intelligence Systems(CCIS),2011:633-637.
[5]吴轩钦,谭国俊,宋金梅,等.基于混合磁链观测器电励磁同步电机矢量控制[J].电机与控制学报,2010(3):62-67.
[6]HU J,WU B.New integration algorithms for estimating motor flux over a wide speed range[J].Power E-lectronics,IEEE Transactions,1998,13(5):969-977.
[7]刘军锋.基于U-I模型的感应电动机定子磁链观察模型方法研究[J].电气传动,2008,38(4):20-24.
[8]WEI X S,MA X L.Some techniques of vector control systems of medium voltage three-level inverters[C]∥Power Electronics and Motion Control Conference,IPEMC04,2004(3):1399-1403.
[9]SHINNAKA S,SAGAWA T.New optimal current control methods for energy efficient and wide speed range operation of hybrid field synchronous motor[J].IEEE Trans on Digital Object Identifier,2007,54(5):2443-2450.
[10]周二磊,符晓,王珂,等.基于混合磁链模型的电励磁同步电动机矢量控制研究[J].变频器世界,2011(1):56-58.
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:40:58
防爆电机(2022年2期)2022-04-26 13:57:02
上海大中型电机(2021年1期)2021-06-09 09:12:04
防爆电机(2020年4期)2020-12-14 03:11:08
防爆电机(2020年3期)2020-11-06 09:07:30
中国电气工程学报(2019年21期)2019-10-21 17:12:09
苏州市职业大学学报(2018年4期)2018-11-02 07:18:18
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
