基于GPS/DR组合的移动测量系统定位
2012-08-22 08:02孙冬凯
科技视界 2012年35期
孙冬凯
(上海同济大学测绘与地理信息学院 中国 上海 200092)
0 前言
移动测量系统是一种多传感器集成的数字成图系统,对于多传感器集成空间数据采集系统而言最重要的是直接地理坐标参考,确定测量传感器的坐标,使得移动测量系统成为一种独立的测成图系统[1]。全球定位系统(Global Positioning System,GPS)可以进行全球、全天候和实时导航,定位精度相关性小,但是接收机需要观察4颗以上卫星才能进行定位,在高速运动的情况下,或者城市中受到高大建筑物、隧道等的遮挡时,会造成失锁。航位推算(Dead-Reckoning,DR)通过一个方向传感器和一个速度传感器推算车辆的瞬时位移增量,在用户初始位置已知的情况下求解出位置信息。能够不依靠外界信息独立自主地导航定位,但由于方向传感器的误差随着时间的延长而积累,所以DR不能单独、长时间的提供定位服务[2]。GPS和DR导航系统各有优缺点,通过卡尔曼滤波的方法建立模型将两者组合起来,可以弥补两者单独定位的许多不足。GPS/DR组合系统可以得到平滑、高采样率的定位结果,用DR的短时间定位结果辅助GPS结算,避免失锁等因素对导航带来的影响,而GPS可以辅助DR的定位结算,避免由于时间带来的DR累积误差,从而提高导航定位的精度。
1 GPS/DR组合Kalman滤波模型的建立
Kalman滤波方法是一种对动态系统进行实时数据处理的有效方法,其通过一系列的观测量,采用相应的滤波算法估计出所需的观测值。本文采用的GPS/DR组合模型为扩展Kalman滤波模型,主要包括状态方程和GPS/DR观测方程。GPS/DR观测方程中的观测值包括GPS定位位置解,DR观测的角速度与距离。
1.1 GPS/DR组合系统状态方程的建立
建立状态方程的一个难点是如何描述车辆加速度变化。采用机动载体的“当前”统计模型来描述车辆加速度的统计分布。这种模型的意义在于,当目标现正以某一加速度运动时,它在下一瞬时的加速度取值范围是有限的,而且只能在“当前”加速度的领域内[3]。
取组合定位系统的状态向量为 X=[xe,ve,ae,xn,vn,an]T,其中 xe、xn分别为车辆东向和北向的位置分量;ve、vn分别为车辆东向和北向的速度分量;ae、an分别为车辆东向和北向的加速度分量。设采样周期为T,得到系统离散的状态方程为:

式中 Xk是系统的 n维状态向量,Φk,k-1是系统的 n×n维状态转移矩阵,Γk,k-1是 n×p 维干扰输入矩阵,Wk是系统的 p 维随机干扰向量。
1.2 GPS/DR组合系统观测方程的建立
将GPS输出的东向位置信息eobs、北向位置信息nobs、DR输出的角速度w以及里程计在一个采样周期内输出的距离s作为观测量,得到系统离散的观测方程为

式中,Zk=[eobs(k) nobs(k) wksk]T

其中v1、v2分别是GPS接收机输出的东向位置和北向位置的观测噪声,可近似为的高斯白噪声;εw为陀螺的漂移,近似为的高斯白噪声;εs为里程表的观测噪声,近似为(0,σ2s)的高斯白噪声。
1.3 GPS/DR组合系统Kalman滤波解算
GPS/DR组合系统噪声满足Wk和Vk相互独立,系统过程噪声方差阵非负定,系统观测噪声方差阵正定,则根据扩展Kalman滤波递推方程和所建立的GPS/DR组合定位系统的状态方程(式(1))和观测方程(式(2)),可以得到系统的递推滤波方程如下[3~6]:

状态一步预测:一步预测误差方差阵:滤波增益矩阵:


状态估计:

估计误差方差阵:

只要给出初值X0和P0,依据k时刻的观测值Zk,就可以依据式(3)~式(7)递推计算得 k 时刻的状态估计 Xk(k=1,2,…)。
2 实验分析
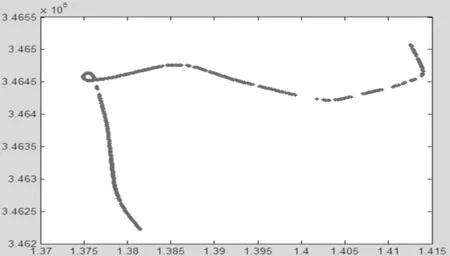
图1 GPS单独定位轨迹图
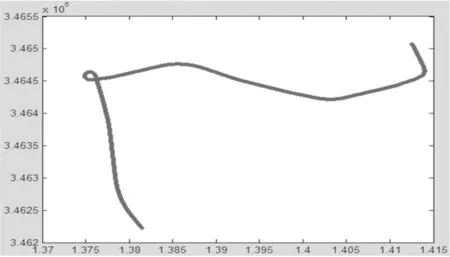
图2 GPS/DR组合卡尔曼滤波定位轨迹图
本次车载导航试验使用的是同济大学的LD2000型移动测量系统采集的上海高架路实测数据。由于GPS和DR系统的时间系统不同,在进行组合导航定位时,需先进行时间同步,将GPS和DR的时间基准统一为采用GPS接收机的时间。GPS/DR数据进行组合滤波前,先将GPS接收机采集的数据与GPS基站采集的数据进行差分,得到GPS输出的WGS-84大地坐标,通过高斯投影正算转换到当地水平坐标系下,即东向、北向坐标。
现已知移动测量系统从坐标点(141252.583,3465078.865)出发,做初速度为零的变加速运动。可取滤波系统的相关参数为:初始状态向量X0=[141252.583,0,0,3465078.865,0,0]T,初始预测噪声协方差阵P0=diag[10,1,0.02,10,1,0.02],选取的各方差值为GPS/DR组合数据经过卡尔曼滤波前后的轨迹对比如图1、2所示。
图1为GPS数据得到的定位轨迹,由于桥面遮挡等原因,GPS信号会出现短暂的失锁,导致GPS不能正常工作,造成定位信息的缺失。GPS/DR的组合系统在GPS失锁时,可以通过DR系统进行车辆的航位推算,补充GPS不能正常工作时的定位信息,并且不会出现误差的累积。通过两者的信息的融合,稳定有效的给出了移动测量系统整个数据采集过程的运动轨迹。通过比较,GPS/DR组合定位有效提高了单一系统动态定位的可靠性。
3 总结
本文提出了基于GPS/DR观测数据的组合定位的Kalman滤波模型,并用改模型对实测数据进行计算。通过与原GPS观测数据的定位结果对比表明,应用Kalman滤波模型处理GPS/DR数据进行定位,能够有效的解决因卫星失锁导致的GPS定位失效以及DR单独定位误差累积的问题,提高定位系统的可靠性和准确性,为移动测量系统提供更好的定位服务支持。
[1]于兴旺,张小红,刘经南,等.GPS/DR原始观测值组合导航定位研究[J].武汉大学学报:信息科学版,2009,02.
[2]杨晓云,何恒,施浒立.车辆GPS/DR组合导航系统研究[J].测绘通报,2007(9).
[3]付梦印,邓志红,张继伟.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003.
[4]汪志明,花向红,陈远,等.GPS/DR组合Kalman滤波模型及性能分析[J].武汉大学学报:信息科学版,2009,09.
[5]杨元喜.自适应动态导航定位[M].北京:测绘出版社,2006.
[6]刘友文.基于联邦式Kalman滤波的 GPS/DR组合定位技术[J].机电技术,2010(5).
猜你喜欢
军事文摘(2023年18期)2023-11-03
当代水产(2022年6期)2022-06-29
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
测绘科学与工程(2017年1期)2017-05-04
太空探索(2016年7期)2016-07-10
太空探索(2015年8期)2015-07-18
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27