基于DSP的交流伺服控制系统实验平台开发
2012-08-16 01:15:08房芳
电气电子教学学报 2012年5期
房 芳
(东南大学自动化学院,江苏南京 210096)
随着微电子、计算机和控制技术的迅速发展,运动控制技术取得了长足的进步[1]。交流伺服控制系统正朝着数字化、高精度、高速度和高性能的方向发展[2-3]。其中,永磁同步电机伺服系统已成为交流伺服系统的主导。控制器方面,数字信号处理器以其高速数字信号处理特性,实现了先进复杂的控制算法,使交流伺服系统的控制性能得到进一步提高[4]。
本文设计实现了基于DSP的交流伺服控制系统综合实验平台,该平台以TMS320F2808 eZdsp评估板为核心,设计开发了整流、外部驱动、检测、通信等硬件模块,实现了电机的矢量控制策略。本文讨论了其在“DSP技术及课程设计”课程教学中的实际应用。分析了交流感应电动机不同坐标系下的数学模型,研究矢量控制的原理和空间电压矢量(SVPWM)的控制规律。该实验平台在教学和科研过程中取得了良好的效果。
1 系统总体结构
本实验平台主要由四个逻辑模块组成:模拟接口模块、I/O接口模块、JTAG接口模块和USB端口的JTAG控制器模块。内含交/直/交变频电路,包括整流滤波电路、逆变驱动电路、电流检测电路、上位机通讯电路以及其他外围接口电路。控制部分以TMS320F2808 eZdsp评估板为核心,由驱动信号输出、光电隔离电路和信号传送电路等。构成了基于DSP控制器的交流伺服控制系统。其硬件框图如图1所示。

图1 控制系统整体结构图
2 实验平台硬件设计
1)整流滤波电路
整流电路部分为单向不可控整流电路,滤波电容的功能主要有两点:一是过滤电压纹波,二是当负载变化时,使直流电压保持平稳。当主电路工作时,因为工作频率较高,开关动作会在直流环节产生电流突变。由于主电路分布电感电流的存在,MOSFET的集电极和发射极会出现高频的尖峰毛刺电压,可能损坏器件,因此在接逆变模块之前要加上一个由阻容电路组成的吸收缓冲电路。
2)逆变驱动电路
电机控制的驱动器采用IR2130芯片。IR2130芯片可同时控制六个大功率管的导通和关断顺序,从而达到控制电机转速和正反转的目的。逆变电路如图2所示。
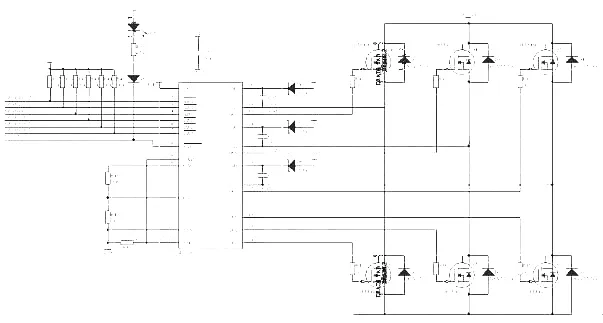
图2 逆变驱动电路
3)电流检测电路
本电路由两个霍尔电流传感器检测出A相和B相的定子电流,通过200欧姆的采样电阻转换后,变为(-5V~+5V)的电压信号。由于DSP的A/D转换器只能处理0~3V单极性信号,必须将双极性的信号转换为单极性的,为此增加一个偏移量实现电位的提升。这里选取偏移量为+5V,将信号提升为0~10V的信号,利用比例电路将其转换到0~3V的范围内。同时为了防止输入模拟电压过高或过低以及消除电流反馈信号中的噪声信号,还需要加入模拟输入量的滤波和限幅环节。如图3所示。
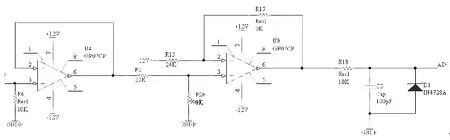
图3 电流检测电路
第一个OP07组成跟随器电路,可以提高输入阻抗,增大带载能力。第二个OP07接-12V电源,构成减法电路,起到电平平移的作用。设信号检测电路的输入电压为Vin,则输出电压为

4)转速和位置检测电路
采用M法测速。输出三路信号为差分信号,分别为 A+,A-,B+,B-,Z+,Z-。需要经过处理转换成单路信号后才可以直接接入到DSP的正交脉冲编码电路QEP的输入引脚QEP1和QEP2。
QEP模式对两路脉冲的前后沿均进行计数,这样相当于4倍频而无需外部的倍频电路。而且能够根据两路脉冲的先后次序判别电机的转动方向,省去了外部的辨向电路,增加了系统的可靠性。采用美国TI公司的MC3486实现码盘差分信号处理。MC3486提供4路差分信号通道,每个通道有A、B两个输入,一个Y输出。当A-B>0.2V时,Y输出高电平;当A-B<0.2V时,Y输出低电平。
5)通信与接口电路
本系统控制电路板和上位PC机之间通过RS232串行总线进行通信,使用MAX232芯片进行电平转换。
3 系统软件架构
系统软件是实现伺服控制的关键部分,主要完成定子电流、转子零位置和转速的检测、坐标变换、转子磁链估计、PID电流和转速控制调节等功能。控制策略采用转子磁场定向矢量控制,控制系统软件包括:电机电流、速度的采样与计算,控制算法的实施,坐标变换,PWM信号的输出,故障检测与保护。其软件架构如图4所示。

图4 软件结构图
4 实验平台在教学中的应用
4.1 系统开环启动
系统开环启动用于测试硬件电路的功率单元以及软件架构里的开环磁链给定模块、矢量生成模块和PWM波形产生模块的状态是否正确。PARK逆变换子程序的输出作为电动机定子电压参考值;矢量计算模块根据给定的电压参考值计算出相应的占空比指令;PWM波形发生模块根据计算的占空比指令产生PWM波输出到逆变器。
实验时,按操作规范连接实验系统硬件,接通主功率电源和DSP控制电源。启动CCS软件,下载编写的程序,通过选择“Debug-Run”全速运行程序。此时电机启动迅速达到最大转速(设定50Hz);在实时模式下修改rmp_freq的值(2A00H~2000H),相应电动机的转速发生变化。观测Ta,Tb和rmp-out的波形,如图5和图6所示。从图中可以看出,输出三相电流幅值相等,相位互差120°,其波形近似为正弦波。
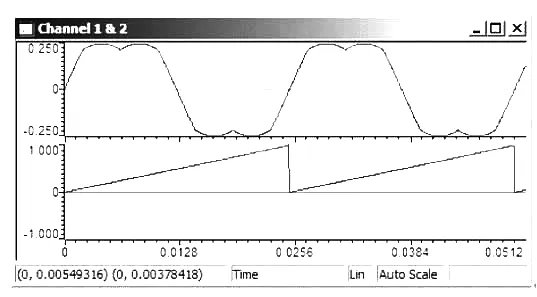
图5 Ta与rmp-out波形

图6 Ta与Tb波形
4.2 闭环运行测试
此实验用于测试速度估计和电流检测模块的软硬件功能是否正确,反馈信号处理环节“CLARKE变换”和“PARK变换”功能是否正确。电动机在50Hz情况下闭环启动运行。在实时模式下利用图形显示功能观测检测到的电流“Ia_out”和“Ib_out”波形和相位关系为相差120°的两路正弦信号,且“Ia_out”超前“Ib_out”,观测 rmp-out与 Ta的波形,如图7所示。
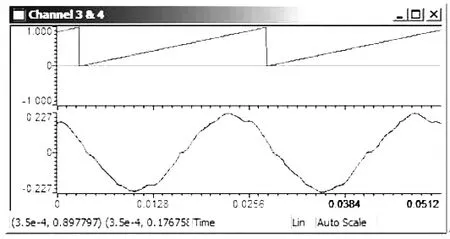
图7 rmp-out与Ia-out波形
CLARKE变换模块的输出clarke_d和clarke_q是相差90°的两路正弦信号,PARK变换模块的输出park_D和park_Q为两个直流量,其大小随“Ia_out”和“Ib_out”幅值变化而变化。实时模式下通过内存变量窗口观测速度测量值speed_frq和speed_frq_rpm,speed_frq_rpm与LCD的速度显示值相接近,direction信号随电动机的转向切换而变化。
5 结语
本文设计并实现了以TMS320F2808为控制器的交流伺服控制系统综合实验平台。完成了控制、通信等硬件电路模块的设计与开发,在此基础上确立了一种全数字交流伺服系统的控制方案,实现了电机的矢量控制策略。通过具体的实验教学,增加了学生的感性认识和实际操作能力,并且使学生对交流伺服控制抽象的知识点有了直观的理解和掌握,具备一定的系统开发能力。
[1] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2004
[2] 张锐,白连平.永磁交流伺服电机控制系统的研究[J].北京:电气技术,2011,3:6-9
[3] 谢玉春,杨贵杰,崔乃政.高性能交流伺服电机系统控制策略综述[J].深圳:伺服控制,2011,1:19-22
[4] 张兴国,党幼云.基于DSP的永磁同步电动机交流伺服控制系统的设计[J].西安:西安工程大学学报,2009,23(6):115-119
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12 00:12:51
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
中国特种设备安全(2021年9期)2021-03-02 05:40:46
中学生数理化·中考版(2019年10期)2019-11-25 09:39:06
电子制作(2019年24期)2019-02-23 13:22:20
测控技术(2018年2期)2018-12-09 09:00:46
电子制作(2018年17期)2018-09-28 01:56:44
现代防御技术(2016年1期)2016-06-01 12:13:28
通信电源技术(2016年3期)2016-03-26 07:13:14
新高考·高一物理(2016年1期)2016-03-05 22:47:39