
射频水印系统中的同步算法
2012-08-09 10:21葛云露王先义
电波科学学报 2012年3期
赵 军 余 松 葛云露 王先义
(中国电波传播研究所青岛研发中心,山东 青岛266107)
引 言
数字水印出现于20世纪90年代,最初是一项为保护多媒体信息知识产权而发展起来的技术。经过数十年的快速发展,数字水印已经不再局限于数字图像、音频、视频等数字产品中,应用于射频系统,确保无线系统的使用安全,成为数字水印技术新的发展方向。应用于射频系统的数字水印也称作射频水印,最早是由美国的一些研究机构提出的。我国在近几年也相继开展了相关理论的研究,并取得了一定的成果[1-7]。
相对于数字产品中的水印技术而言,射频水印的一个技术难点是水印同步。由于没有确定的数据起点,射频水印很难直接使用常见的数字水印嵌入方法,而需要增加同步机制。目前主要的同步机制是在信号中嵌入同步码,通过帧同步和数据同步两个阶段实现水印信息的同步。由于现有水印同步算法缺乏帧同步位识别能力,只能忽略帧同步过程而依靠逐位搜索同步码的方式直接寻找数据同步位,水印同步效率较低。提出了一种基于水印图像清晰度评价的帧同步识别方法,用于在水印同步机制中建立帧同步过程,缩短水印同步时间。
1.射频水印基本原理
图1所示的是一个典型的基于基带信号水印嵌入算法的射频水印系统,其核心部分包括水印嵌入和水印提取。水印嵌入部分是以帧为单位进行的,嵌入水印信息后,合并为完整信号经上变频、功率放大后发射。水印提取部分在下变频后首先进行帧同步和数据同步,然后进行水印信息的提取。

图1 典型的射频水印系统
水印信息通常是进行二进制编码后才嵌入基带信号中的。为了能够进行数据同步,水印编码不仅包含水印图像的编码,而且还添加了数据同步码。在水印编码完成后,就可以利用水印嵌入算法按位嵌入到信号帧中,每个信号帧通常只嵌入一位编码。图2所示是水印嵌入原理示意图。
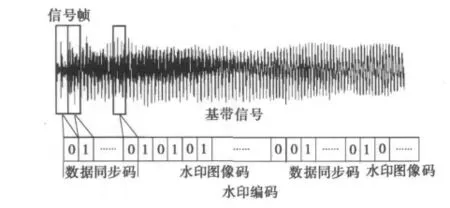
图2 水印嵌入原理示意图
常见的基带信号水印嵌入算法有时间域水印嵌入算法、变换域水印嵌入算法、扩频域水印嵌入算法、基于感知模型水印嵌入算法、混沌水印嵌入算法等。图3所示是基于小波变换的变换域水印嵌入算法示意图。水印嵌入算法通常还包括密钥,用于提高水印系统安全性。在已知水印嵌入算法的条件下,如果密钥未知,也无法正确提取水印信息。
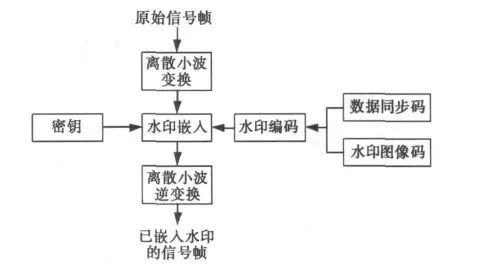
图3 基于小波变换的水印嵌入算法
水印提取的关键技术之一是水印同步。同步包括帧同步和数据同步两个方面。帧同步用来识别信号帧的起始位置,同步后可从原始信号中正确获得水印编码序列。数据同步用来识别水印编码序列中水印图像码的起始位置,同步后可从水印编码序列中正确获得水印图像。
由于目前的水印同步算法无法识别帧同步位,因此大多数射频水印系统是通过直接搜索数据同步码进行水印同步的。图4是该同步过程的示意图。滑动框在原始信号上滑动的同时,运算模块将滑动框中的信号分帧,并进行数据同步码的试提取。如果提取的数据同步码与水印嵌入时预置的数据同步码相同,则数据同步位得到确认,水印同步建立。

图4 水印同步示意图
2.射频水印同步算法的改进
在上述射频水印系统中,同步算法的效率影响着水印提取总体效率。尝试通过帧同步和数据同步分阶段进行的方法来改善水印同步的效率。图5展示了水印同步算法的改进思路。图中同步搜索起始位是水印同步算法开始计算的位置,该位置与截获信号的时刻有关,具有一定随机性。同步搜索终止位是距离搜索起始位最近的数据同步位(同时也是帧同步位),在该位置可正确提取出水印图像,也即是同步算法搜索的目标。当前,常见的同步算法从同步搜索起始位到同步搜索终止位是以顺次搜索的方式进行的,因为缺乏帧同步位识别手段,所以,在途径若干个帧同步位时,无法有效利用该信息跨越非同步搜索点,带来搜索时间上的浪费。改进算法的思路是补充帧同步位识别能力,在搜索过程中途径第一个帧同步位时,能有效利用该信息,迅速跳转到下一个帧同步位,避免过多地在非同步位计算,有效提高搜索效率。

图5 水印同步算法改进思路
为了实现帧同步位的识别,首先提取了部分帧同步位的水印图像进行分析。图6所示是一组部分存在帧同步偏差的水印图像提取结果,提取位置在帧同步位超前160点到滞后180点之间。从提取结果可观察到,水印图像清晰度随着不断接近帧同步位而不断提高。为了合理评价水印图像的清晰度,借鉴了数字图像处理中图像清晰度评价方法。

图6 帧同步偏差时的水印图像提取结果
图像清晰度评价函数也称作聚焦评价函数。常用的聚焦评价函数包括:TenenGrad聚焦评价函数、沃拉特(Vollath)聚焦评价函数和平方梯度(Squared-Gradient)聚焦评价函数[8]。
TenenGrad聚焦评价函数是利用索贝尔(Sobel)边缘算子计算一阶微分的图像清晰度评价函数,函数表达式为
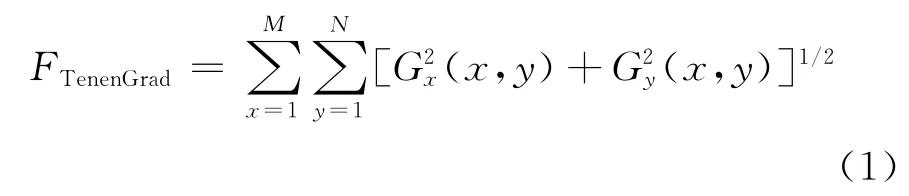
其中:Gx(x,y),Gy(x,y)分别是图像各像素f(x,y)与Sobel边缘算子方向模板的卷积。
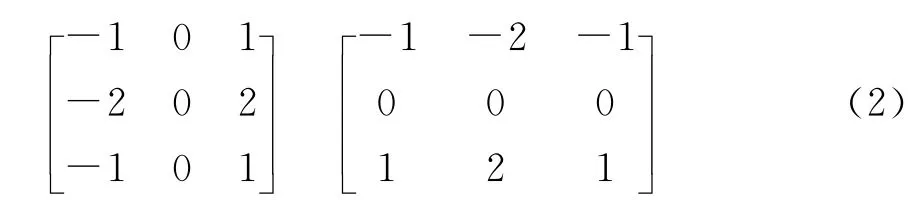
Sobel算子方向模板通常包括水平方向模板和垂直方向模板[9]。
Vollath聚焦评价函数包含基于自相关和基于标准偏差两种表达式。其中基于自相关的表达式为

基于标准偏差的表达式为
Squared-Gradient聚焦评价函数通过将微分项平方以突出大微分值的影响,用于提高信噪比,其表达式为

上述聚焦评价函数可在水印同步过程中辅助识别帧同步位,从而建立独立的帧同步过程,缩短水印同步时间。
3.实验结果和分析
为了验证图像清晰度评价对帧同步位识别的作用,以及对水印同步时间的改善情况,进行了如下实验。
实验1:首先进行帧同步位识别实验。选取一段音频作为基带信号。水印嵌入算法选用小波域嵌入算法,嵌入的信号帧长度为256点。水印图像为16×16的“X”字母点阵图。基带信号经过ADDA转换后,作为水印同步实验的数据源。
水印同步运算滑动框在已嵌入水印的基带信号上从序号0开始连续滑动2 560次,其中经过的10个帧同步位序号为256*n+128(n=0,1,2,…,9)。滑动框每移动一次都进行水印图像提取运算,并对提取的图像进行清晰度评价。实验同时采用了式(1)、(3)、(5)作为图像清晰度评价函数,评价结果如图7所示。从试验结果看:三种清晰度评价函数都一定程度地反映出与帧同步的关系,但TenenGrad聚焦评价函数尖峰不明显,并且丢失了一个帧同步位,而Vollath聚焦评价函数和Squared-Gradient聚焦评价函数的尖峰与帧同步位对应关系较好。虽然曲线并不平滑,但峰值明显,易于搜索。

图7 水印图像的清晰度评价
实验2:进行水印同步对比实验,观察图像清晰度评价对水印同步时间的改善情况。数据仍采用实验1中已嵌入水印的基带信号。同步的起始位置随机产生。图8为对比实验的结果。图中横坐标为同步实验的序号,纵坐标为原水印同步算法与本文提出的改进算法在实现水印同步所耗时间的比值。

图8 水印图像的清晰度评价
实验结果表明:改进的水印同步算法在缩短水印同步时间上有明显效果。在100次实验中水印同步时间平均缩短了13.34倍。
虽然该方法有效地缩短了水印同步时间,但并未达到预期程度。其原因是:改进算法在每个搜索位置都需要提取完整水印图像用于清晰度评价,相对原水印同步算法仅需提取水印图像中的同步码而言,提取的数据更多,因而时间也更长,部分抵消了改进算法的优势。在未来的研究中,通过引入一定的最大值搜索算法,进一步提高搜索效率,将能够进一步缩短水印同步的时间。
4.结 论
射频水印系统中,水印同步是一项重要内容。由于现有水印同步算法缺乏帧同步位识别能力,因此只能忽略帧同步过程而依靠逐位搜索的方式直接寻找数据同步位,水印同步效率较低。提出了一种基于水印图像清晰度评价的帧同步位识别方法,利用水印图像清晰度与帧同步偏差之间的关联关系,建立了独立的帧同步过程,避免了原水印同步算法在帧同步位之间逐位搜索,缩短了水印同步时间。仿真实验结果表明:Vollath聚焦评价函数和Squared-Gradient聚焦评价函数对识别帧同步位有较好的指示作用,改进的水印同步算法对缩短同步时间效果明显。
[1]吴绍权,黄继武,黄达人.基于小波变换的自同步音频水印算法[J].计算机学报,2004,27(3):365-370.WU Shaoquan, HUANG Jiwu, HUANG Daren.DWT-based audio watermarking with self-synchronization[J].Chinese Journal of Computers,2004,27(3):365-370.(in Chinese)
[2]雷 赟,刘 建,严 波,等.窄带的自同步音频水印算法[J].计算机学报,2008,31(7):1283-1290.LEI Yun,LIU Jian,YAN Bo,et al.Narrowbandbased audio watermarking with self-synchronization[J].Chinese Journal of Computers,2008,31(7):1283-1290.(in Chinese)
[3]董晓梅,胡蓉华,李晓华.一种基于数字水印的无线传感器网络数据识别传输方案[J].武汉大学学报:理学版,2010,56(2):194-198.DONG Xiaomei,HU Ronghua,LI Xiaohua.A data identification and transmission scheme for wireless sensor networks based on digital watermarking[J].Journal of Wuhan University:Natural Science,2010,56(2):194-198.(in Chinese)
[4]BASSIA P,PITAS I,NIKOLAIDIS N.Robust audio watermarking in the time domain[J].IEEE Trans on Multimedia,2001,3(2):232-241.
[5]PODICHUK C I,DELP E J.Digital watermarking:algorithms and applications[J].IEEE Signal Processing Magazine,2001,18(4):33-46.
[6]李 伟,袁一群,李晓强,等.数字音频水印技术综述[J].通信学报,2005,26(2):100-111.LI Wei,YUAN Yiqun,LI Xiaoqiang,et al.Overview of digital audio watermarking[J].Journal on Communications,2005,26(2):100-111.(in Chinese)
[7]彭志娟,王汝传,王海艳.基于数字水印技术的无线传感器网络安全机制研究[J].南京邮电大学学报:自然科学版,2006,26(4):69-72.PENG Zhijuan,WANG Ruchuan,WANG Haiyan.Narrowband-based audio watermarking with self-synchronization [J].Journal of Nanjing University of Posts and Telecommunications: Natural Science,2006,26(4):69-72.(in Chinese)
[8]王 勇,谭毅华,田金文.一种新的图像清晰度评价函数[J].武汉理工大学学报,2007,29(3):124-126.WANG Yong,TAN Yihua,TIAN Jinwen.A new kind of sharpness-evaluation-function of image [J].Journal of Wuhan University of Technology,2007,29(3):124-126.(in Chinese)
[9]蒋 婷,谭跃刚,刘 泉.基于SOBEL算子的图像清晰度评价函数研究[J].计算机与数字工程,2008,36(8):129-131.JIANG Ting,TAN Yuegang,LIU Quan.Research of a clarity-evaluation function of image based on SOBEL[J].Computer & Digital Engineering,2008,36(8):129-131.(in Chinese)
猜你喜欢
汽车工程师(2021年12期)2022-01-17
新世纪智能(数学备考)(2021年9期)2021-11-24
中学生数理化·中考版(2021年3期)2021-07-22
军民两用技术与产品(2021年12期)2021-03-09
新世纪智能(数学备考)(2020年9期)2021-01-04
家庭影院技术(2020年11期)2020-12-28
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
家庭影院技术(2020年4期)2020-05-21
现代电子技术(2016年15期)2016-12-01
电子制作(2016年1期)2016-11-07
