一种基于数学形态学和投影的车牌定位方法
2012-07-30 04:07唐灵洁胡红萍白艳萍杨丽丽
电子测试 2012年7期
唐灵洁,胡红萍,白艳萍,杨丽丽
(中北大学理学院,山西太原 030051)
0 引言
车牌识别是智能交通系统中的重要组成部分,车牌识别的过程包括车牌定位、车牌分割、车牌识别。其中,车牌定位是所有工作的前提和基础。目前,已经有很多学者在这方面进行了研究,提出了很多车牌定位的算法,但是随着车型的日益增加,背景变化多端,常用的一些算法已经难以克服一些新的干扰情况。
目前车牌定位提取方法主要有神经网络、灰度特征法、纹理特征、投影法、数学形态学等,在定位过程中,它们各有自己的优缺点[1]。本文针对这些算法的特点,选取了数学形态学与投影法相结合的方法,对图像进行粗定位和精定位,最后,根据车牌自身的长宽比例等先验知识对车牌进行最终的定位。
1 图像预处理
在对车牌进行定位之前,需要对图像进行预处理,以方便定位工作能更好的进行。我国的车牌主要有蓝底白字、黄底黑字、黑底白字等多种颜色,由于拍摄的车牌受天气、光线的影响较大,用颜色作为主要的定位手段可靠性不强,因此要对其进行灰度转换,由于噪声、光照等原因还要对图像进行平滑、去噪、滤波等处理。
1.1 图像灰度化
本文采取的灰度转换公式如下[2]:
式(1)中,Gray为灰度值;R,G,B 分别为红色、绿色和蓝色分量值。
图1、图2为灰度化后的对比图。

图1 原始图像
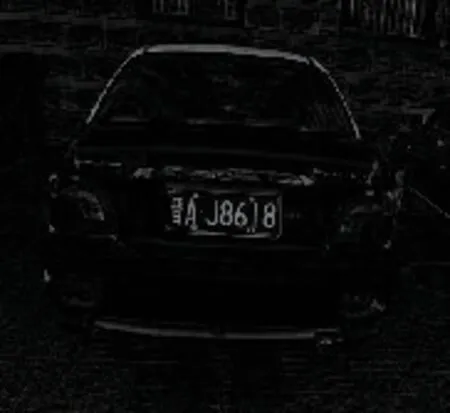
图2 灰度化后图像
1.2 图像二值化
二值化[3]图像在数字图像处理中占有非常重要的地位,二值化的效果直接影响到根据车牌区域特征进行车牌定位及后续工作,而二值化的关键在于阈值的选择。
阈值选择的方法可以分为全局阈值法、局部阈值法和动态阈值法等。经过对多种方法做评估,通过分析比较发现,采用改进的Otsu 法[4]适应性较强,故本文采用改进的Otsu 法来对灰度化处理后的图像,进行二值化处理。图3、图4分别为二值化前后图像。
图3 二值化前

图4 二值化后
2 基于数学形态学的车牌区域粗定位
2.1 数学形态学的基本运算
数学形态学[5]是由一组形态学的代数算子组成,其中最基本、最重要的形态学算子是:腐蚀和膨胀,其他的一些形态学算子如开、闭等都是由这2种最基本的形态学算子组合而成的。
二值图像的膨胀和腐蚀定义如下:
图像集合A用结构元素B来膨胀,记作A⊕B,定义为:

图像集合A用结构元素B来腐蚀,记作AΘB,定义为:

膨胀与腐蚀是不可恢复的运算,但通过腐蚀与膨胀可以构成开运算和闭运算。
开运算是指A先被B腐蚀,再被B膨胀的过程,可以消除细小物体并在纤细处分离物体和平滑较大物体边界;记作AoB,定义为:

闭运算过程与开运算相反,它能填充物体内细小空洞,连接邻近物体和平滑边界。记作A·B,定义为:

2.2 形态学边缘检测
基于形态学的图像边缘检测的关键是如何利用形态学的各种基本运算的组合构造形态学边缘检测算子,以及如何选取结构元素来较好地解决边缘检测精度与抗噪声性能的协调问题。平常一些基本的形态学边缘检测算子对待噪声都比较敏感,只适用于噪声较小的图像,本文在基本形态学边缘检测算子基础上进行了改进,得到改进的抗噪膨胀型算子[6]如下式:

图5、图6分别为对图像边缘检测前后对比图像。
图5 边缘检测前

图6 边缘检测后
2.3 检测车牌候选区域
经过形态学边缘检测之后,大体外轮廓为一矩形区域,但车牌区域还是断开的,为了进一步提取车牌区域,需要用数学形态学对图像进行处理,使车牌区域内部连通,而使车牌区域与干扰区域断开。本文连续运用闭运算(图7)、第一次开运算(图8)、第二次开运算(图9)之后,检测到的区域如图7-9所示。

图7 闭运算

图8 第一次开运算

图9 第二次开运算
由图可以看出,经过一系列闭、开运算之后,断裂的区域很好的粘连,而一些细小的干扰区域也很好的去除掉,并且较好地平滑了图像,方便了后续工作的进行。
3 基于水平、垂直投影的精定位
下面对以上得到的二值图像进行水平和垂直方向的投影[7],车牌边缘与背景区域的分界处在投影图中必将出现明显的跳变,在此处进行切割即可得到更精确的车牌区域。通过以上的方法可以将车牌区域部分精确定位,为下一步字符的分割、识别提供了优质的车牌区域。
水平方向精定位,去除水平边框和铆钉,计算车牌水平方向的投影,得到每行的投影值H(i),共m行,i表示第i行,i∈(1,m),按公式(7)求S(i)。

S(i)表示第i-1行,第i行,第i+1行的水平投影值H(i-1)、H(i)、H(i+1)的累加之和,对第一行和最后一行不需此操作。投影值大于一定的阈值,认为是字符区域予以保留。取一定的阈值,以车牌图像高度中心点为起点,逐行向上水平扫描,小于此阈值的第一行就为车牌的上边界,将以上的区域裁切掉;同理,以车牌图像高度中心点为起点,逐行向下水平扫描,小于此阈值的第一行即为车牌的下边界,再将其以下的区域裁切掉。于是就将车牌进行了水平方向的精定位,图10为水平投影图,图11为水平精定位图像。
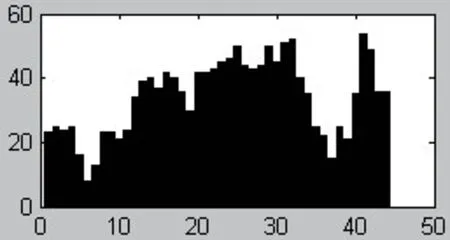
图10 水平投影

图11 水平精定位
垂直方向精定位,去除垂直边框。对车牌的垂直边缘进行垂直投影(如图12),得到每列的投影值V(j),j表示第j列。图像一共n列j∈(1,n),按公式(8)求T(j):

T(j)表示第j-1列,第j列,第j+1列的垂直投影值V(j-1)、V(j)、V(j+1)的累加之和,对第一列和最后一列不需此操作。投影值大于一定的阈值,认为是字符区域予以保留。取一定的阈值,以车牌图像高度中心点为起点,逐列向左垂直扫描,小于此阈值的第一列就为车牌的左边界,将其左边的区域裁切掉;同理,从图像中心起,逐列向右垂直扫描,小于此阈值的第一列即为车牌的右边界,将其右边的区域裁切掉,图13为垂直精定位图像。
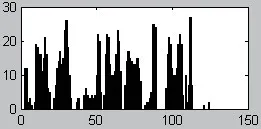
图12 垂直投影

图13 垂直精定位
在水平、垂直投影定位过程中,最重要的一个环节就是阈值的选取,在此是根据投影图的图像来确定的。经过投影之后,再根据车牌本身固有的长宽比例特征[8],最终定位车牌区域,图14为最终定位结果。

图14 定位结果
4 结论
本文采用数学形态学与投影法分别对车牌进行粗定位和精定位,首先通过数学形态学的特点粘连车牌断裂区域,滤去细小的噪声区域,同时平滑图像,最后检测出待精定位的候选区域。接着,再利用水平投影和垂直投影进一步精确地确定车牌区域,最后,根据车牌的先验知识最终确定车牌区域。
本文通过对150张分辨率为640×480具有不同背景的汽车图片进行测试,定位成功率达到92.7%以上。实验数据如表1所示。

表1 定位实验结果
实验结果表明,本文提出的定位方法具有较高的定位能力,对待一些拍摄效果较差,噪声较多的车牌具有良好的抗噪力。
[1]高翠云,江朝晖,薛明.一种改进的车牌定位算法[J].计算机技术与发展,2007,17(11):30-35.
[2]齐永奇,王文凡,赵岩,赵耀.基于纹理特征和垂直投影的车牌定位算法研究[J].现代电子技术,2007,17(2):184-186.
[3]周开军,陈三宝,徐江陵.复杂背景下的车牌定位和字符分割研究[J].计算机工程,2007,33(4):198-200.
[4]胡斌,宫宁生.一种改进的Otsu阈值分割算法[J].微电子学与计算机,2009,26(12):153-155.
[5]杨国来,林男,姬孝斌,叶清.基于数学形态学和综合颜色特征的车牌定位方法[J].甘肃科学学报,2007,19(1):114-117.
[6]吕庆莉,罗瑜.基于形态学的改进灰度图像边缘检测算法[J].陕西科技大学学报,2011,6(4):98-101.
[7]应宏伟,姚明海,张永华.基于纹理分析和垂直投影的车牌定位算法[J]控制工程,2004,11(5):432-435.
[8]李珺,刘莉.高效快速车牌定位算法研究[J].甘肃科学学报,2006,18(4):88-91.
猜你喜欢
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
电子制作(2019年12期)2019-07-16
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
小猕猴智力画刊(2017年5期)2017-05-25
电子制作(2017年22期)2017-02-02
中国继续医学教育(2015年2期)2016-01-06
振动、测试与诊断(2014年6期)2014-03-01
现代检验医学杂志(2014年1期)2014-02-06