
抽油机光杆位移的无线测试方法解析
2012-07-26 04:57付涛
自动化仪表 2012年5期
付 涛
(中石化胜利油田分公司生产管理部,山东 东营 257000)
0 引言
示功图是判断抽油机井工况的基本依据,也是采油厂日常生产管理的常规测试项目[1-2]。示功图测量仪是载荷与位移参数的综合测量仪器。对于位移测量,目前较常用的方法是拉绳式的直接位置测量法。
拉绳式直接位置测量方法以光栅、光电编码器等作为传感器[3],通过计算拉绳的行程圈数来获得油杆的位置。这种位置测量方式结构简单且容易实现,但必须将传感器的不同部件分别安装在抽油机的活动部位和固定部位,同时要求这些部件在很长的运动轨道上啮合良好,这在抽油机井污染严重、震动和冲击很大的环境中难以满足。因此,许多功图测量仪改为利用加速度测量来间接进行位置测量。
基于加速度的位移测量属于间接测量方法,能够实现位移的无线测试,简化了测试程序,提高了功图测量仪的可靠性和位移测试数据的准确性[4-6]。然而,由于存在加速度的零点校正和死点加速度振荡等问题,基于加速度的光杆位移测试方法也有其自身的不足之处。
1 系统组成与数据特点
无线位移测试系统的基本思路是沿用加速度值推算位移的方法。因此,为了研究抽油机光杆位移的无线测试方法,搭建了一个基于PC的光杆加速度无线数据采集试验系统。测试系统结构如图1所示。测试系统采用的加速度传感器为ADXL202。
无线位移测试系统由无线传感和数据接收处理两部分组成。加速度传感器、单片机系统和无线发送模块整体封装于壳体中组成无线传感部分,通过卡口快速加装的方式安装于光杆上。无线接收模块与PC机相连组成数据接收处理部分,在PC机上可通过软件实现加速度波形的实时显示与存储,加速度的采样频率为50 Hz。
图1中,ADXL202是AD公司推出的一种低成本、低功耗的单片双轴加速度传感器。它既可测量动态加速度,又能测量静态加速度[7]。
某抽油机光杆所对应的1 min内加速度曲线如图2所示。
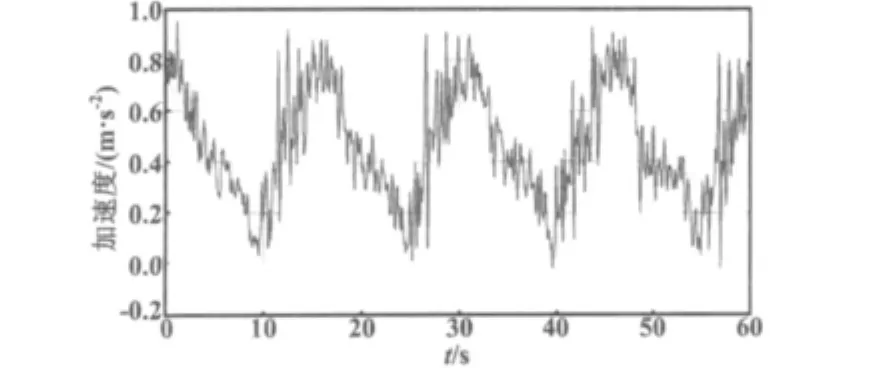
图2 实测光杆加速度曲线Fig.2 The actual acceleration of polished rod
从图2可以看出,受抽油杆自身震动以及电磁干扰的影响,传感器所测得的加速度波形包含大量的杂波分量。因此,在利用加速度值推算位移时,必须对加速度数据进行滤波处理。
2 位移测算方法解析
2.1 理论计算方法
当抽油杆上下运动时,加速度传感器输出A(t)的表达式为:

式中:a(t)为抽油杆运动的加速度;g(t)为重力加速度。
由于抽油杆上下作周期性运动,其速度呈周期性变化,即:

式中:v(t)为抽油杆运动的速度;T为一个冲程周期。
对a(t)积分,可得:

考虑到抽油杆上下作周期性运动的特点,若将v(0)看成下死点的初始速度,则v(0)=0。
于是,有:

位移同样可以通过对速度积分得到,即:

若将下死点的位移S(0)作为参考点,则抽油杆上下作周期性运动的相对位移为:

由于重力加速度的变化很小,可看作常数。令其为G,它就是加速度的零点值。作零点校正时,一般采用测量前先存储零点值、计算时将测量值减去零点值的方法。零点值由于各种原因会有微小变化,因此,用减去预先存储的零点值的方式作零点校正后可能还存在残差,且经两次积分后会产生很大的误差。
在离散采样的情况下,由加速度求解位移的算法步骤具体如下。
第一步,设N为一个冲程周期内的加速度采样点数,ΔTn为相邻两次采样的时间间隔,an为第n个时间间隔的加速度采样瞬时值,取下死点时的加速度值为第一个点,则计算校正零点值为:

第二步,计算第n个时间间隔的加速度采样修正值为:

第三步,计算第n个时间间隔的速度为:

式中:t为采样时间间隔(对于本测试系统,由于采样频率为 50 Hz,则 t=0.02 s)。若 n=1,则 vn=0。
第四步,计算速度的校正零点值为:

计算第n个时间间隔的速度修正值为:

第五步,计算第n个时间间隔的位移为:

2.2 滤波方法
在得到加速度测量值后,要计算抽油杆运动的相对位移,还必须确定积分求速度时的边界条件——即速度的零点,一般是选择光杆运动的下死点。
由于加速波形包含有大量的杂波分量,直接由原始加速度测量数据推算下死点是很困难的,因此,需要对加速度波形进行滤波,再利用其判断下死点。考虑到实现算法的有效性和实用性,选择滑动值滤波法对加速度波形进行滤波[8-9]。
最简单的滑动平滑算法是矩形或无加权的滑动平均平滑,其实现方法是将时间序列中的每一个点用其相邻的m个点的均值来代替。对于3点平滑(m=3),则有:

式中:j=2,…,n-1;Sj为平滑时间序列的第j个点;Yj为原始时间序列的第j个点;n为时间序列的总点数。
平滑宽度m通常为奇数。如果时间序列包含的噪声为白噪声(即噪声在各个频段均匀分布),噪声标准差为s,则经过一次无加权的滑动平均平滑滤波后,其白噪声的标准差变为
三角平滑是在矩形平滑的基础上使用了加权平滑函数。对于一个5点的三角平滑,则有:

式中:j=3,…,n-2。
从式(14)可以看出,5点的三角平滑相当于将3点矩形平滑的过程重复两遍。因此,与矩形平滑相比,三角平滑能够更有效地滤除高频噪声。经过一次三角平滑滤波后,其白噪声的标准差变为
当平滑宽度越大时,时间序列的噪声抑制程度也越大,与此同时,平滑过程对信号的干扰程度也越大。最优的平滑宽度取决于信号的形状和采样间隔。对于尖峰型的信号,平滑比是很重要的一项参数。平滑比即平滑宽度和尖峰半宽的比值,一般来说,增加平滑比会提高信噪比,不会对尖峰的位置造成影响,但会造成尖峰幅值与宽度的减小。原则上,平滑比不应超过1,否则平滑后的时间序列的尖峰将会失真。如果时间序列平滑的目的是测试尖峰的位置,则可将平滑比设得大一些(介于0.5和1之间);而如果时间序列平滑的目的是更好地测试尖峰高度和宽度的真实值,则平滑比不应大于0.2。
基于上述原则,选取平滑比为0.1,设“尖峰”半宽为20点,则平滑宽度为200点[10],得到的平滑加速度曲线如图3所示。
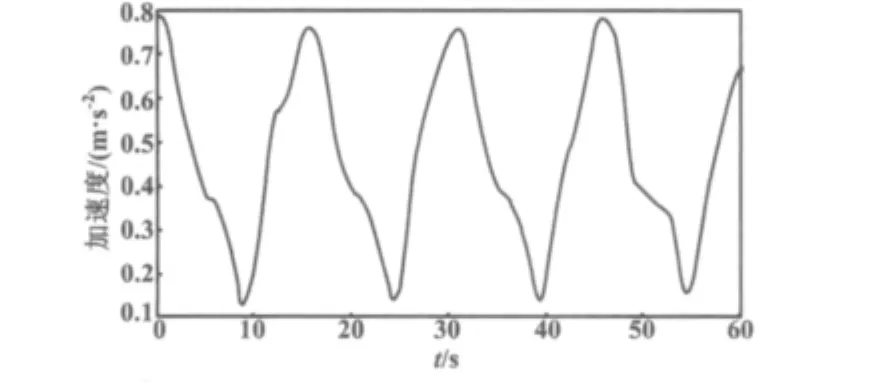
图3 平滑滤波后的光杆加速度曲线Fig.3 The acceleration of polished rod after smooth filtering
2.3 下死点与冲程周期的确定
加速度的峰值点即为光杆运动的下死点。考虑到平滑后的时间序列会带来信息损失,故先通过寻找平滑一阶导数的下行过零点来计算得到峰值的位置;再通过最小二乘曲线拟合法,对未经平滑的原始时间序列中峰值附近的数据段进行处理,进而计算峰值的位置;从而计算加速度时间序列的峰值。
时间序列的一阶导数采用如下公式计算:
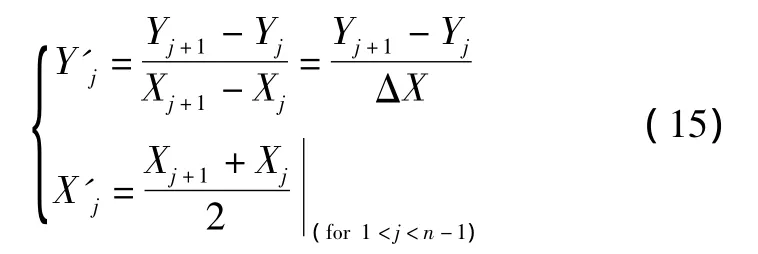
式中:X'j和Y'j为第j个点导数的X坐标和Y坐标值;n为时间序列的点数;ΔX为X坐标点与其相邻点的差值。对于等间隔的三个相邻点,也可采用如下公式计算某点平均斜率,即:

两个相邻峰值点之间的时间差即为每个冲程的周期。
2.4 位移测试结果分析
利用上述算法计算得到的一个冲程的光杆位移曲线、下死点提前100点所得的位移曲线以及下死点滞后100点所得的位移曲线分别如图4所示。
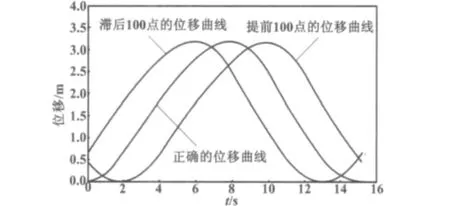
图4 光杆位移曲线Fig.4 The curves of displacement of polished rod
由图4可知,确定边界条件对光杆位移计算是十分重要的。
3 结束语
利用笔者设计的光杆加速度无线数据采集试验系统,获取了抽油机光杆的加速度数据。针对所获取数据的特点,研究了数据的滤波方法,并给出相关参数的选择依据,进而通过寻找平滑一阶导数的下行过零点来计算得到峰值的位置;同时,通过最小二乘曲线拟合法获得下死点位置,最终利用考虑抽油杆运动周期性的加速度二次积分算法得到位移。通过对现场实测数据的计算与分析,证明了该测算方法的有效性。
[1]刘益江,张学臣,李伟,等.抽油井示功图综合解释[J].油气田地面工程,2007,26(8):3-5.
[2]高鹏.抽油井示功图测试方法改进探讨[J].内蒙古石油化工,2007(12):55-56.
[3]袁蓓蓓.KSZ_1光栅长度变送器[J].自动化仪表,1995,16(1):23-25.
[4]沈承虎,容太平,蔡德钧,等.加速度传感器在示功仪中的应用[J].仪表技术与传感器,2000(1):40-42.
[5]于云华,张家珍,时海涛,等.基于加速度传感器的油井示功图位移测量技术研究[J].电子产品世界,2009(9):25-30.
[6]容太平,沈承虎,袁中平,等.用加速度传感器测量位移的原理与误差分析[J].华中理工大学学报:自然科学版,2000,25(5):58-60.
[7]鹿麟,林凌,李刚.ADXL203型双轴加速计在倾斜度测量中的应用[J].国外电子元器件,2007(7):61-64.
[8]刘艺柱,杨瑞兰.采用滑动平均滤波法提高硬币识别准确率的研究[J].制造业自动化,2010,32(1):42-44.
[9]胡松,江小炜,杨光.滑动平均滤波在微弱脉冲信号检测中的应用[J].计算机与数字工程,2007,35(10):169-171.
[10]鹿麟,林凌,李刚.滑动平均数字滤波参数研究[J].集美大学学报:自然科学版,2006,11(4):381-384.
猜你喜欢
石油石化节能(2022年12期)2022-12-30
内江科技(2021年4期)2021-12-28
石油石化节能(2021年12期)2021-12-28
新疆钢铁(2021年1期)2021-10-14
焊管(2021年4期)2021-05-17
科教新报(2020年21期)2020-06-05
化工设计通讯(2020年5期)2020-01-12
装备环境工程(2019年7期)2019-08-21
中国设备工程(2019年14期)2019-07-29
小学生必读(低年级版)(2019年10期)2019-04-13
