
多轴级联控制方法及其在RFID封装设备中的应用
2012-07-26 11:04尹周平权建洲
自动化仪表 2012年2期
张 锐 尹周平 权建洲
(华中科技大学机械科学与工程学院1,湖北 武汉 430074;空军雷达学院军械制配教研室2,湖北 武汉 430019)
0 引言
射频识别(radio frequency identification,RFID)电子标签作为物联网的核心技术,被认为是21世纪最有发展前途的信息技术之一。在RFID标签封装设备中,主要包括点胶、贴片、热压、检测和基板输送五大模块。其中,基板输送自始至终贯穿整个设备的加工工作,与其他四个模块的工作紧密联系。传输过程中,张力和运动精度直接影响到产品的质量。然而,在基板传输过程中,基材的张力波动受系统很多不稳定因素的影响,如多辊轴的轴线平行度、辊轴的不圆度等[1]。因此,为提高产品的质量、保证运动的效率,要求控制系统既能进行运动控制,又能进行张力控制[2]。
Norbert A.Ebler等对张力控制器加张力传感器和位置控制器加张力调整辊两种张力控制方法进行了分析和比较[3]。Priyadarshee等研究了在高速度低张力情况下的卷到卷传输过程[4]。F.L.Luo采用一种人工神经网络算法,成功隔离了控制回路之间交叉耦合的速度和张力,使两个回路可以独立控制[5]。任剑等对张力控制方法进行了分析,提出了一种按张力偏差调节的张力闭环控制方案[6]。王春梅采用张力控制器加磁粉制动器的方式对放卷过程中的张力进行控制[7]。
上述张力控制法对控制系统的要求复杂,且很难同时很好地进行运动控制和张力控制。此外,实际应用中维护和管理复杂,设备调试繁琐且成本相对较高,影响了其在工程中的应用和推广。
1 RFID标签封装基板输送要求
RFID电子标签封装设备主要由点胶、贴装、热压、检测及基板输送这五大模块组成,采用卷对卷的生产方式。RFID封装设备的工作示意图如图1所示。
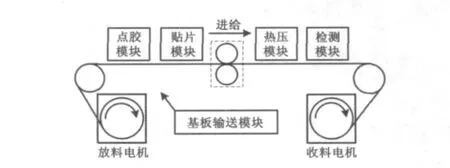
图1 RFID封装设备工作示意图Fig.1 Operation of the RFID packaging equipment
图1中,点胶模块通过对基板天线点滴特定的导电胶,为芯片与线圈互连提供粘接剂。贴片模块完成对芯片的倒贴装任务。热压模块通过热压头对芯片与天线的连接部位进行加热和加压,使胶水固化,完成芯片与天线的电气互联。检测模块实现对封装好的标签进行在线检测。基板输送模块将标签输送到点胶、贴片、热压和检测模块指定的区域,完成输送功能,基板输送模块由放料、基板进给和收料组成。
由上述分析可知,在封装过程中,点胶的胶滴、贴片模块的贴装和热压固化都是围绕基板进行的。因此,基板输送的精度控制对封装标签是否合格至关重要。
在基板输送过程中,有两个主要因素会影响基板输送精度:基板进给的位置控制精度和基板中张力变化引起的基板变形。根据RFID装备对基板输送的要求,基板输送的精度要求控制在±0.5 mm内。这就要求控制系统能同时进行精确的运动控制和恒张力控制,使基板进给的精度满足设备的需求。
2 多轴级联张力控制方法
多轴级联张力控制方法基于独立式可编程多轴控制器(PARKER ACR9000)的多轴控制功能,通过张力传感器检测反馈张力信息,采用力和位置的多轴级联控制对卷绕放料轴进行控制。该方法既能同时进行精确的张力控制和位置控制,又降低了生产成本,减少了控制的复杂性,具有较高的应用价值。
2.1 多轴级联张力控制原理
根据基板输送过程中对张力和运动的要求,多轴级联张力控制原理如图2所示。多轴级联控制将位置控制轴与张力控制轴串联起来。

图2 多轴级联的张力控制原理Fig.2 Principle of multi-axle cascade tension control
图2中,内环是位置控制轴,编码器的信号反馈至位置环,通过位置闭环控制对放料轴进行位置控制;外环是张力控制轴,可以通过A/D输入口接收张力传感器的模拟信号,用作张力反馈。这样,张力指令通过与张力反馈信号作比较,经过控制器调节后,将指令输出用于修正位置控制轴实际接收的位置指令值。通过对位置控制轴实际位置的调整变化,最终可以实现张力的控制。
2.2 多轴级联实现方法
控制器选用PARKER公司的ACR9000P3U8M1。该控制器作为一款多轴独立式运动控制器,稳定可靠、调试方便;同时,提供了丰富的接口,可以实现8轴联动、插补功能。控制器自带8路16位高精度A/D,可实现对传感器反馈的信号的处理,并通过伺服轴通道输出指令对电机进行位置控制。区别于常用运动控制卡,PARKER运动控制器最突出的特点在于其电子齿轮功能具有开放性,用户可以设置相关参数实时采集信号资源,用于修正位置指令。实现多轴级联张力控制的关键在于充分利用PARKER控制器电子齿轮的开放性特点,建立虚拟张力轴,实时采集张力轴的输出并作为位置修正指令,通过动态改变内环的位置指令,驱动卷绕电机带动料轴转动,最终实现基材中位置轴和张力轴的级联控制。
本文采用PARKER控制器作为核心控制器件,交流伺服电机作为执行部件。电机编码器信号作为位置环反馈至控制器。张力信号经过滤波放大后反馈至控制器模拟量输入口,作为放料电机的外环张力环。控制器通过位置环和张力环双闭环控制电机的运动,达到同时进行位置控制和张力控制的目的。
多轴级联控制方法实现如图3所示。

图3 多轴级联控制方法实现Fig.3 Implementation of multi-axle cascade control method
图3中,轴0为放料轴,轴1为新增虚拟轴。上位装置分别给轴0发送位置指令、给轴1发送张力指令。轴1通过比较张力指令和张力反馈信号,将比较值通过轴1的PID控制器输出给轴0的轨迹规划器,修改轴0的位置指令。轴0通过比较更改后的位置指令和实际位置,将比较值通过轴0的PID控制器输出给伺服放大器,以控制电机运动。这种控制方法可以实现以张力控制为主要控制环路、位置控制为辅助控制环路的级联控制。
通过对控制器进行相关设置,改变电子齿轮比、速度参数和一些比例参数,可以实现效果良好的级联控制。如实现多轴级联和张力信号采集,可以采用以下指令。


3 试验结果及分析
为验证张力的控制效果,搭建了如图4所示的基于PARKER多轴控制器的基板输送实验平台进行试验。
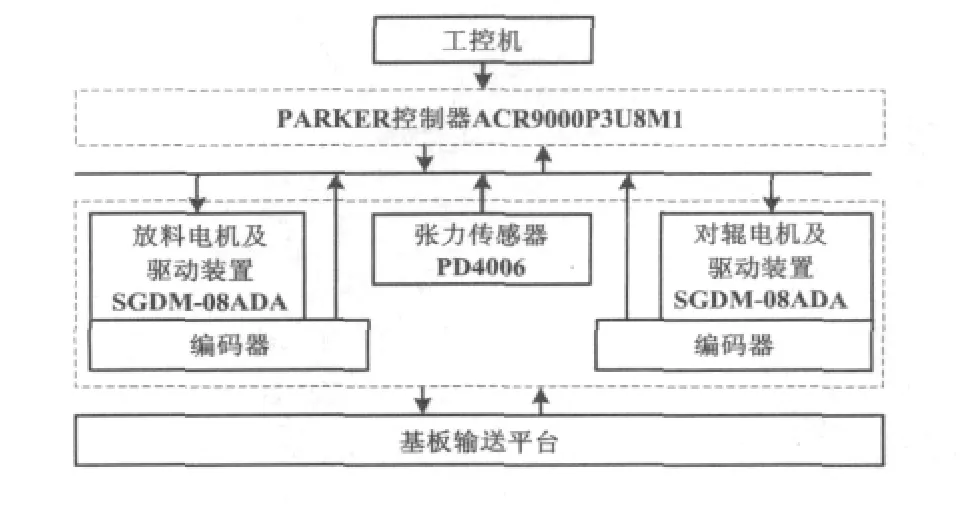
图4 硬件结构构成示意图Fig.4 Schematics of hardware structure
由图4可以看出,系统采用两套安川伺服电机SGMAH-08AAA41及驱动装置SGDM-08ADA搭建基板输送平台;采用E+L的张力传感器PD4006,实时采集基板输送中的张力信息;采用 PARKER公司的ACR9000P3U8M1作为核心运动控制器,负责传感器信息的处理和伺服电机的运动控制。
试验结果如图5和图6所示。其中,图5表示基板进给的位置精度,图6表示张力试验曲线。

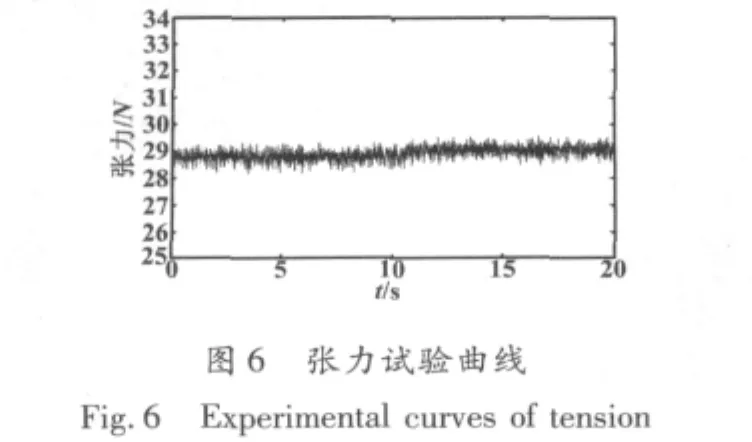
试验中采用的柔性基材为 PET薄膜,厚度为50 μm,宽度为 400 mm,弹性模量为 4000 MPa,基板进给速度为0.12 m/s。设定参考张力值为28.8 N,张力采样间隔时间为0.5 ms。
从图5和图6可以看出,基板进给的位置精度为±0.05 mm;基板输送过程中张力控制精度为±1 N,由公式e=计算可得张力变化引起的基板形变波动为±0.06 mm。因此,综合基板进给的位置精度和基板形变,基板输送的精度可以控制在±0.11 mm(±0.5 mm以内),满足设备对基板输送精度的需求。
4 结束语
在RFID设备基板输送过程中,张力的控制至关重要,其直接关系到产品加工的质量。传统方案通常是采用独立的张力控制器进行张力控制,并采用运动控制器进行位置控制,这往往导致生产成本高、上位机无法监控张力信息、调试和维护管理复杂。本文根据RFID封装设备的工况需求和实际加工过程中对张力和位置的控制要求,提出了一种基于PARKER控制器的多轴级联张力控制方法。该方法既能同时对电机进行精确的张力控制和位置控制,又降低了生产成本、减少了控制的复杂性,具有较高的应用价值。
[1]Shin K H,Jang J I,Kang H K,et al.Compensation method for tension disturbance due to an unknown roll shape in a web transport system[J].IEEE Transactions on Industry Applications,2003,39(5):1422-1428.
[2]Chen Jiankui,Yin Zhouping,Xiong Youlun,et al.A hybrid control method of tension and position for a discontinuous web transport system[C]∥ InternationalConferenceon Information and Automation,Zhuhai,Macau,2009:265 -270.
[3]Ebler N A,Arnason R,Michaelis G,et al.Tension control:dancer rolls or load cells[J].IEEE Transactions on Industry Applications,1993,29(4):727 -739.
[4]Mathur P D,Messner W C.Controller development for a prototype high-speed low-tension tape transport[J].IEEE Transactions on Control Systems Technology,1998,6(4):534 -542.
[5]Luo F L.Multiple-page-mapping backpropagation neural network for constant tension control[J].IEE Proceedings Electrical Power Application,1998,145(3):239 -245.
[6]任剑,靳建鼎.薄膜卷制过程中张力控制系统的应用[J].电子工艺技术,2010,31(3):172 -176.
[7]王春梅.张力控制系统在复卷机上的应用[J].中国有色建设,2006(4):29-30.
[8]陈建魁.面向RFID封装的柔性基板输送装置的研究与实现[D].武汉:华中科技大学,2006:16 -18.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
核安全(2022年3期)2022-06-29
电子产品可靠性与环境试验(2022年2期)2022-05-14
陶瓷学报(2020年3期)2020-10-27
科学导报(2019年55期)2019-09-28
制造技术与机床(2019年8期)2019-09-03
中国陶瓷工业(2019年6期)2019-07-25
模具制造(2019年3期)2019-06-06
—— “T”级联
同位素(2019年1期)2019-03-14
制造业自动化(2017年2期)2017-03-20
