
量块双频激光干涉坐标测量系统的设计
2012-07-26 04:57:22姜志华
自动化仪表 2012年7期
姜志华 魏 勇
(上海市计量测试技术研究院1,上海 201203;上海大学机电工程与自动化学院2,上海 200072)
0 引言
量块是用耐磨材料制造,并由一对相互平行测量面构成的实物长度量具。由于量块的中心长度可以通过干涉系统溯源至激光波长,因此量块被视为长度计量中最基本的实物量具之一[1]。作为长度计量中的重要计量标准器,量块的检定一直是国家计量部门和各级计量室的重要工作。
量块检定的方法主要分为光干涉直接测量法和比较测量法[2]。目前,对于尺寸小于300 mm四等及以下的量块可以采用高精度万能测长仪测量,而对于尺寸大于300 mm的量块,则没有很好测量方法。本文研究的双频激光干涉坐标测量系统可以用于300 mm以上非标尺寸量块的直接测量。
1 系统设计
1.1 测量系统硬件组成
双频激光干涉仪是一种增量式的测长仪器。它以激光波长作为长度测量基准,线性精度可达0.1 μm。测量时,可动反射镜与被测对象固定连接在一起,并随着移动机构平稳运动。通过可动反射镜相对于参考反射镜的位移来反映被测长度。该系统由工控机、激光头、固定反射镜、可动反射镜、被测工件、三坐标测量机移动工作台、温度传感器、三坐标测量机计算机控制系统等组成。
基于坐标测量机的双频激光干涉坐标测量系统结构如图1所示。
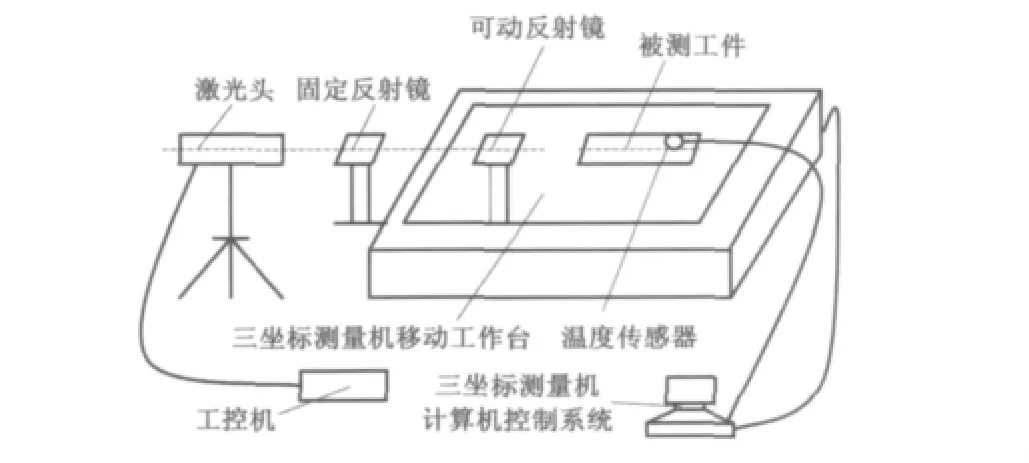
图1 系统结构图Fig.1 Architecture of the system
双频激光干涉仪是利用光干涉原理和多普勒效应产生的频差来进行长度的测量[3]。工作时,激光头产生两束振幅相同、但频率不同的左旋圆偏振光f1和右旋圆偏振光f2。两路光束经过检偏器、滤光器、固定反射镜、可动反射镜等光学元件的光路转换,产生明暗相间的干涉条纹。干涉条纹由光电元件接收并转换为电信号,经放大器的信号放大进入计算机,通过减法器相减计算出信号差值±Δf(正负号表示工作台6的移动方向),由计数器计数可得到信号的脉冲数N。按下面的公式可计算出可动反射镜移动速度v和移动距离l(即被测工件的长度)。
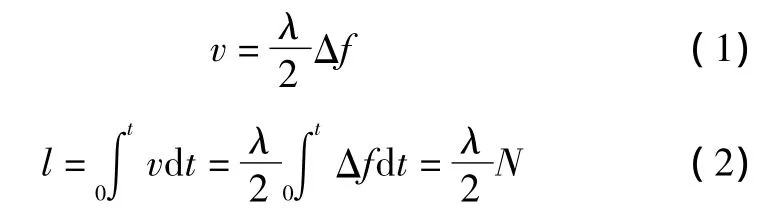
式中:λ为激光的波长;Δf为可动反射镜移动产生的频差;t为实时测量时间;N为计算机记录的脉冲数。
1.2 测量系统软件设计
激光信号采集系统采用Visual C++语言编程定义各环境参数,如温度、压强、湿度等,端口操作函数通过Visual C++语言建立动态库来实现。工控机同时与坐标测量机的quindos软件相结合,编程实现对量块的自动测量,系统流程如图2所示。
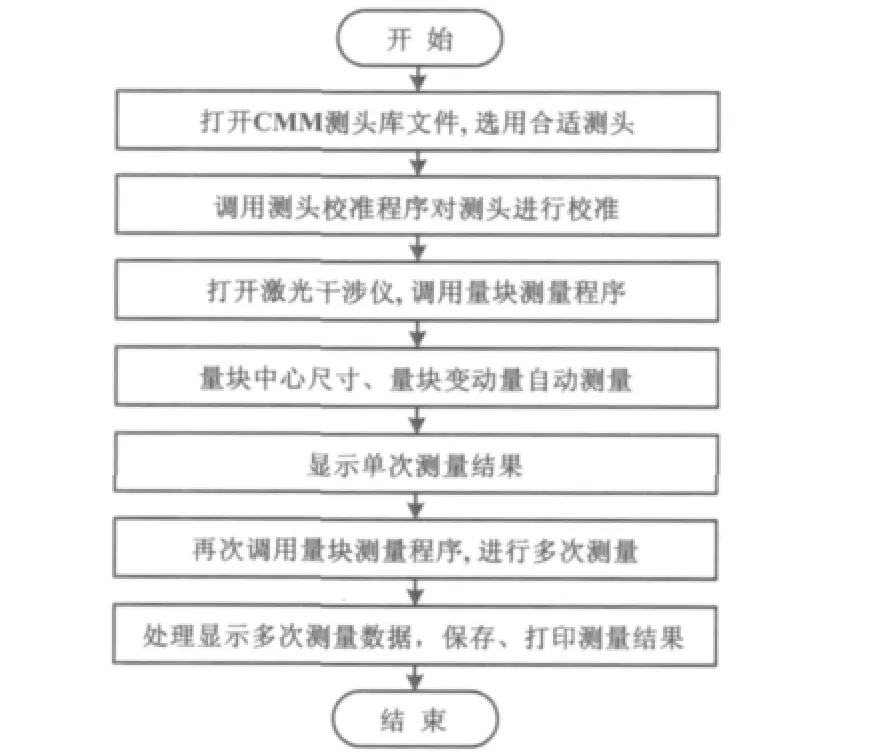
图2 系统流程图Fig.2 Flowchart of the system
2 测量难点及解决方法
测量系统的关键是得到测量过程中激光波长λ的精确值。波长λ与空气折射率n有关[4],同时空气折射率受测量现场环境参数的影响,如测量时环境温度t、气压p和湿度f等的影响。它们之间的数学表达式如下:
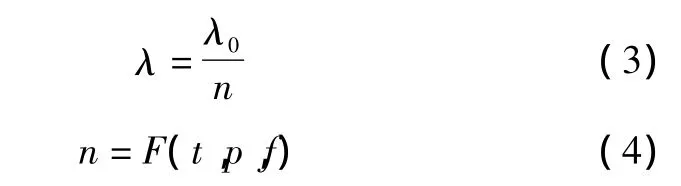
式中:λ0为真空中的波长。
为得到准确的激光波长数值,应通过函数F的关系式求出折射率n的相对精确值。采用英国国家物理实验室Birch和Downs于1993年修改后的埃德林(Edlen)公式进行空气折射率的计算。n的计算值和实验值之间的一致性保持在测量不确定度3×10-8范围内,相对于传统广泛采用的埃德林公式所得计算值更为精确。
由于万能测长仪、光学计自身测量范围和测量精度的限制,尺寸大于300 mm的量块无法采用该类仪器测量。采用三坐标测量机作为测量平台,可方便地对300~1 000 mm量块进行绝对测量。坐标测量机是通用测量仪器,测量范围广、精确度高、重复性好[5]。由于优越的测量性能,三坐标测量机作为量块校准系统的运动机构和测量平台,利用测量机的测头触发信号进行瞄准,激光干涉仪进行长度的测量。整个测量系统由软件控制,通过温度、气压和湿度传感器采集测量现场的环境参数,并由软件系统根据修改后的Edlen公式进行空气折射率n的修正计算,进而得到相对准确的激光波长值λ。
3 实际测量
量块测量前,需要对坐标测量机的测头进行校准。通过校准,将测头的数据,如测球直径坐标、测杆受力所产生的弯曲变形予以确定,经计算后存储在计算机内[6]。量块测量时,软件系统根据存储的测头校准参数,自动对测量结果进行测头探测误差修正。
待激光强度足够、激光信号稳定后,对量块进行10次测量的数据如表1所示。
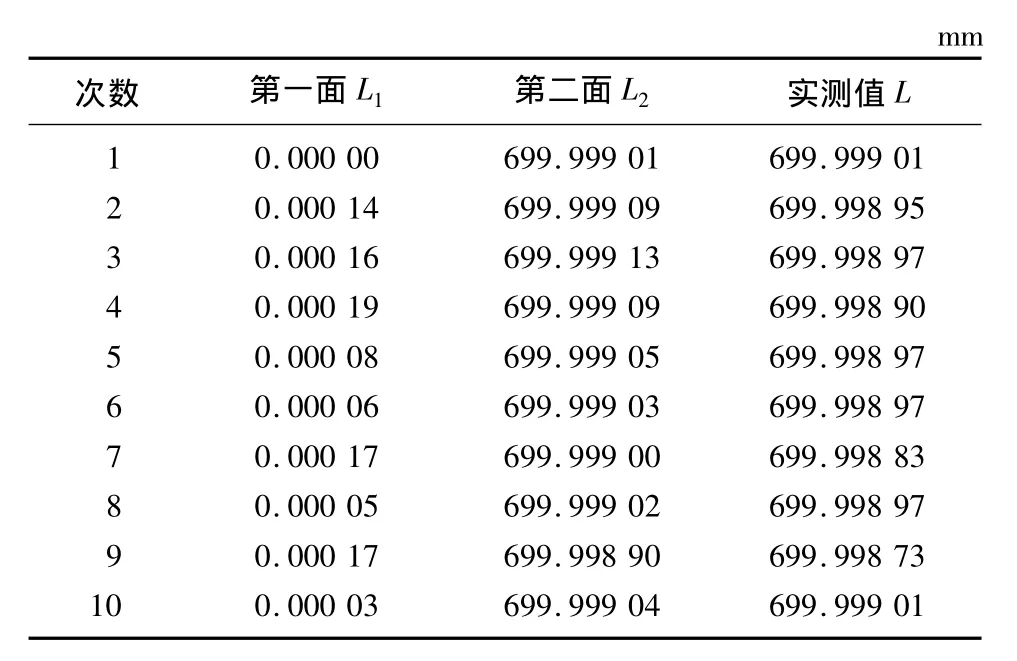
表1 量块测量数据Tab.1 The measurement data of gauge block
试验中用二等量块作为标准器,修正三坐标测量机测头的探测误差。利用坐标测量机对二等量块进行10次测量,得到探针校准直径为5.007 14 mm。选取北京304所制造标称尺寸为700 mm的三等量块作为测量对象,按照JJG 146-2003量块检定规程对量块进行测量。
将量块放置在测量室等温足够时间后开始测量。通过传感器采集的环境参数分别为环境温度20.42℃、空气湿度50%、气压100 814.458 Pa,将这些环境参数代入修正后的Edlen公式,计算出空气折射率为0.999 73。材料温度为20.46℃,因温度差异导致量块长度变化膨胀系数为 11.5 μm/℃。
对测量数据进行处理,得到量块长度平均值为699.998 93 mm。
4 测量系统不确定度分析
4.1 数学模型
用双频激光干涉坐标测量系统测量量块,被测量块长度[7]可表示为:

式中:lG为在参考温度20℃下量块两测量面之间的距离;lMJ为激光干涉仪显示的位移;L为量块的标称值;αG为量块线性热膨胀系数;ΔtG为测量时量块温度tG与参考温度20℃间的差值;δT为探针直径修正的不确定度;δMB为期望值为零修正值,用来反映测量过程中坐标测量机角摆误差产生的影响;δAG为期望值为零修正值,用来反映量块的定向误差;δAJ为期望值为零修正值,用来反映激光的定向误差。
4.2 测量不确定度分析
测量系统的不确定度源有激光波长的不确定度、测量机探头直径修正、坐标测量机瞄准的重复性、量块热膨胀系数影响、坐标测量机角摆的不确定度(阿贝误差)、量块定向和激光干涉仪定向的不确定度等。
波长数值在使用中随着环境参数的变化有所变化,通过传感器采集测量现场的温度、气压和湿度,并用修改后的Edlen公式[8]计算空气折射率n的值,具体计算公式如下。
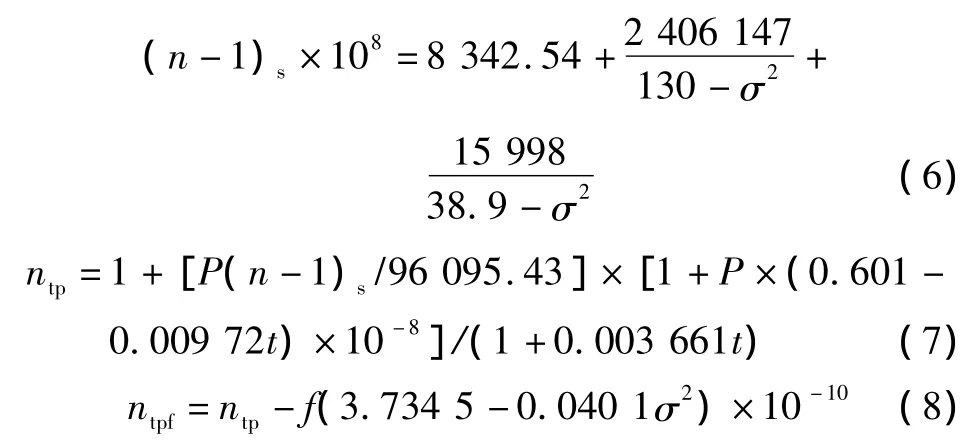
因空气折射率修正引入的波长不确定度,其计算公式如下:

式中:ta的单位为℃;p、f的单位为Pa;L的单位为m。
当空气温度测量不确定度utα=0.2℃、空气压力测量不确定度up=0.05 kPa、湿度测量不确定度uf=0.2 kPa时,激光波长的标准不确定度为:

参考步距规激光校准的不确定度分析过程[9],结合试验数据和测量现场环境参数计算出其他的不确定度分量如表2所示。
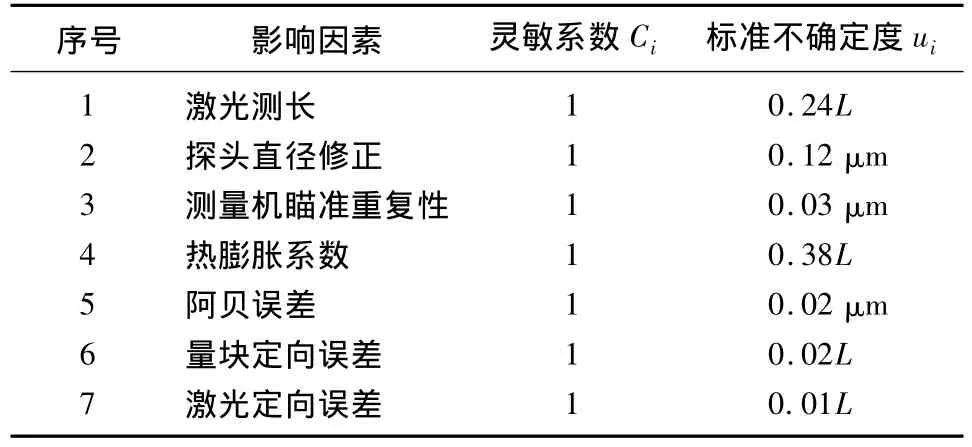
表2 不确定度分量表Tab.2 Components of uncertainty
4.3 合成标准不确定度
由上述各不确定度分量合成的标准不确定度为:

将L值代入上式,计算出700 mm的量块合成标准不确定度为0.42 μm。JJG 146-2003量块检定规程中关于700 mm的三等量块长度测量不确定度允许值计算公式为:

式中:ln为量块的标称长度。
通过比较U和U0的值,可以证明测量系统满足量块检定不确定度计算要求。试验中700 mm量块附带的由上海市计量测试技术研究院检定证书给出的偏差值为-0.8 μm,则量块的实际长度为 699.999 2 mm,试验测量结果为 699.998 9 mm,两者相差 0.3 μm(小于0.45 μm),满足700 mm 三等量块的检定要求[10]。
5 结束语
量块是长度计量中使用的一维实物标准器,量块检定的准确度代表了一个检测机构的计量实力。目前对于300~1 000 mm量块,大都采用量块组合的比较法来进行检定,由于量块间研和性、量块受热膨胀和人工操作偶然误差的影响,采用比较法对非标尺寸量块进行检定存在较大误差。
使用坐标测量机与激光干涉仪组合构成的量块检定系统,利用坐标测量机大的测量范围和激光干涉测量的高精度,可以快速准确地对大于300 mm三等及以下尺寸量块进行绝对测量,为大尺寸量块的检定提供了一种新思路。
[1]蒋秀兰.我国量块计量技术概况与发展趋势[J].上海计量测试,2007,34(1):2-5.
[2]苏俊宏.基于干涉法的量块长度测量技术研究[D].南京:南京理工大学,2006:1-6.
[3]周波.探讨双频激光在量块检定上的应用[J].电子科学,2009(1):29-30.
[4]姜志华,魏勇.基于坐标测量机的步距规激光校准系统[J].上海计量测试,2010,37(6):20-22.
[5]张国雄.三坐标测量机[M].天津:天津大学出版社,1999.
[6]李凯.三坐标测量机探针校准的误差分析[J].物理测试,2004(4):23-25.
[7]王为农,裴丽梅,任国营,等.步距规校准装置[J].计量学报,2009(5A):161-162.
[8]倪育才.空气折射率埃德林公式的修改[J].计量技术,1998(3):22-27.
[9]国家质量监督检验检疫总局.JJF 1258-2010步距规校准规范,中华人民共和国国家计量技术规范[S].北京:中国计量出版社,2010.
[10]国家质量监督检验检疫总局.JJG 146-2003量块检定规程,中华人民共和国国家计量检定规程[S].北京:中国计量出版社,2004.
猜你喜欢
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29 09:13:56
自动化学报(2019年12期)2020-01-19 05:18:14
制造技术与机床(2019年6期)2019-06-25 10:18:02
电子制作(2019年7期)2019-04-25 13:17:10
仪器仪表用户(2019年4期)2019-04-09 05:05:58
电子测试(2018年4期)2018-05-09 07:27:32
中国设备工程(2017年10期)2017-01-20 12:15:14
山西青年(2016年22期)2016-11-30 05:44:07
光学精密工程(2016年3期)2016-11-07 09:03:25
大科技(2016年32期)2016-07-12 13:05:58
