基于机器视觉的工程机械行驶速度的研究
2012-07-25 07:12金守峰胡永彪
中国工程机械学报 2012年4期
金守峰,胡永彪
(长安大学 工程机械学院,陕西 西安 710064)
工程机械行驶速度是预测机器的牵引力、滑转损失、牵引效率和滑转率等牵引性能参数时所需要的基本变量,工程机械的作业行驶时均为低速作业行驶速度,如摊铺机为0~5m·min-1;铣刨机为0~20m·min-1等[1].对于低速作业行驶速度的测量目前常用接触式五轮仪进行测量,但由于路面不平及潮湿的低附着系数,路面的测量误差增大[2].雷达测速仪的测速范围大约在24~199km·h-1,不适合工程机械的低速作业速度测量[3];GPS测速精度高但受电离层的天气状况影响及附近建筑物和地面反射造成的延迟较大[4].视频测速是利用监控视频图像对车辆进行测速,这种方法较多地应用在公路车辆超速监控中[5].
本文利用安装在工程机械车体上的摄像机,在连续成像的条件下采集路面信息,由于工程机械低速行驶,路面灰度纹理图像随机性分布,因此连续路面序列图像间具有很高的相似性,通过匹配跟踪得到路面同一特征纹理在相邻两帧图像中的位置,利用安装高度、摄像机内外参数和成像帧频实时计算得到工程机械的瞬时行驶速度.本文基于机器视觉技术实现了工程机械相对路面的绝对行驶速度的非接触式测量.
1 基于机器视觉的速度测量原理
工程机械行驶路面有沥青、水泥、泥土等各种路面,但无论是哪种道路,都不可能是绝对平整光滑,各处纹理完全相同,且由于路面各处的光反射强度均不相同,具有一定的随机性,通过车载CCD摄像机连续采集路面图像,将其存储在计算机中形成序列图像,由于所获得路面图像的灰度值具有随机性分布,在工程机械低速行驶,摄像机高帧频采集的条件下,相邻帧图像具有很大的相似性,相邻帧灰度图像及其灰度分布统计直方图如图1所示.

图1 路面图像序列及其直方图Fig.1 Pavement and the histogram image sequence
工程机械在匀速直线行驶时,摄像机固定在车体上,随车体作直线运动,在连续相邻两帧时间内,车体移动距离为L,路面同一特征纹理区域AOB在相邻两帧图像中的位置分别为aob和a1o1b1,相邻两帧图像的像面上移动位移为Δl=Δnδ(Δn为像素数,δ为像元尺寸),由图2所示的机器视觉测速模型[6],推导出工程机械移动量L为

式中:α为光学系统缩放率.
工程机械移动量L还可表示为L=vΔt,v为行驶速度,Δt为两帧时间间隔.则由式(1)得到速度v为

利用相邻帧间图像的相似性,通过匹配跟踪计算帧间同一特征纹理的图像位移,结合安装参数、摄像机标定和帧频由式(2)计算工程机械行驶速度.
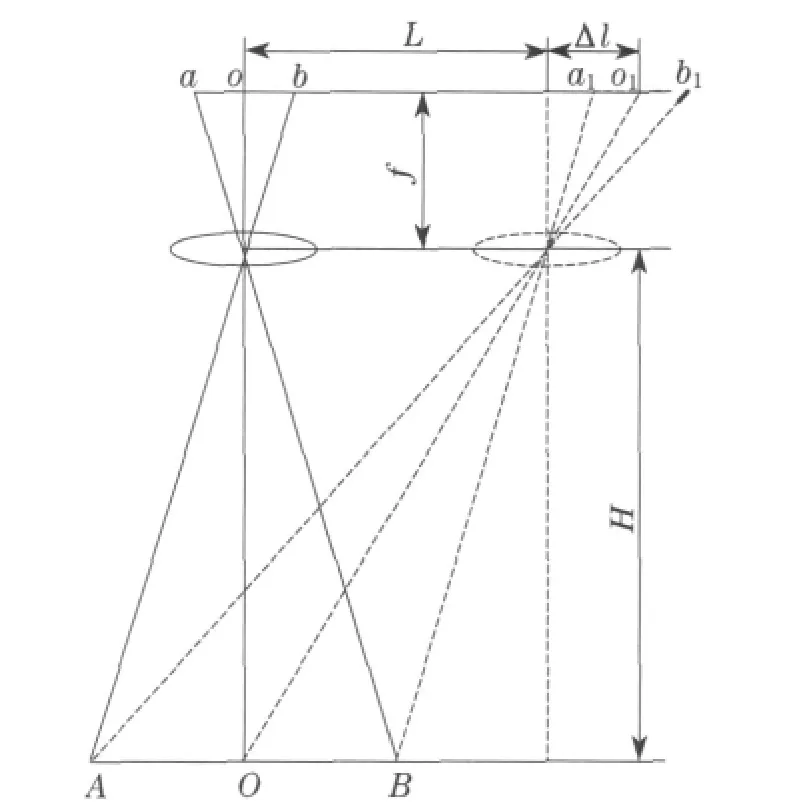
图2 图像测速的视觉模型Fig.2 Image of the visual model speed
2 图像序列的纹理特征匹配
利用路面序列图像相邻帧中同一纹理特征的匹配得到车体移动的位移是计算车体运动速度的关键,如果直接将连续两帧图像进行匹配计算,计算量较大,难以满足实时性的要求.本文结合路面序列图像的特点,提出了基于路面序列图像投影算法进行匹配跟踪来计算两帧间移动位移.
由图1可知相邻帧图像其统计特性具有相似的特点,根据概率论中若二维连续随机向量具有概率密度f(x,y),则关于x方向的边缘概率密度为概率密度f(x,y)在y方向的投影;关于y方向的边缘概率密度为概率密度f(x,y)在x方向的投影.因此本文将如图3所示的图像I(W,H)在x,y两个方向进行投影,把二维图像转换成能量集中在x,y两个方向的一维数列,投影后的数列为符合一定统计规律的随机信号序列.W,H分别为图像的行数和列数,F(i,j)为图像在像素点的灰度.则图像在水平轴和垂直轴上的投影为


图3 图像模型Fig.3 Image model
式中:Ik(i,j)为k帧图像的灰度;Ik+1(i,j)为k+1帧图像的灰度;i,j分别为垂直和水平投影后的坐标;1/H和1/W为消除孤立噪声带来的影响.
相邻帧图像内容相似,从相邻图像中得到的两个方向的一维序列具有较强的相关性,且两个方向上平移的距离接近于图像在这个方向上的实际平移距离[7].对图像投影后得到的一维灰度序列仍能较好地表征图像在x和y方向的特征,如图4所示.
为了实现行驶速度的测量的实时性,本文利用频域中傅里叶变换(FFT)的互相关定理实现x,y方向投影曲线的快速匹配[8-9].用FFT来实现投影曲线的匹配,要注意离散傅里叶变换固有的周期性,采用补零的方法来避免混叠.投影特性曲线快速匹配计算步骤如下:
(1)对图像Ik及Ik+1分别在垂直和水平方向投影,将二维图像变换为一维序列xk,yk,xk+1,yk+1;
(4)对频域卷积进行傅里叶反变换得到x和y两个方向的互相关函数Rx和Ry.
(5)求出互相关函数Rx和Ry的峰值所对应的图像坐标,该坐标位置即为相邻帧图像Ik+1相对于Ik在x和y方向的位移量(Δx,Δy),如图5所示,图中Ok为k帧图像的原点,Ok+1为k+1帧图像的原点.

图4 相邻帧在x与y轴的投影序列Fig.4 Adjoining frames in the xand y projection of the sequence
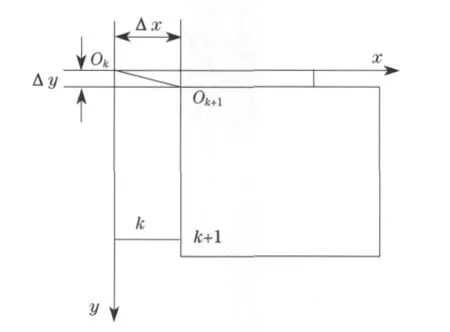
图5 帧间移动位移Fig.5 Frame move between displacement
3 方法验证
3.1 摄像机的标定
根据CCD摄像机所获取的路面纹理信息计算工程机械的行驶速度,路面图像像素上每一点的灰度数值反映了空间作业路面某点反射光的强度,路面图像像素点坐标与路面点的空间坐标的关系由摄像机成像几何模型决定,该几何模型的参数为摄像机参数,计算这些参数的过程为摄像机标定.在本文中摄像机的外部参数和内部参数都将对速度测量精度产生影响,因此必须对这两部分参数进行标定.本文采用两步法来实现摄像机内、外参数的标定,该方法的第一步利用最小二乘法解超定线性方程,求出外部参数;第二步求解内部参数,如果摄像机无透镜畸变,可由一个超定方程解出,如果存在径向畸变,则可结合非线性优化的方法获得全部参数.该方法计算量适中,平均精度可达1/4 000[10].如图6所示为本文在实验室地面上画定网格作为标定模板及图像处理后的标定点.通过Harris角点检测取N组对应点,采用两步法求出摄像机的内外参数,摄像机内外参数如表1所示.
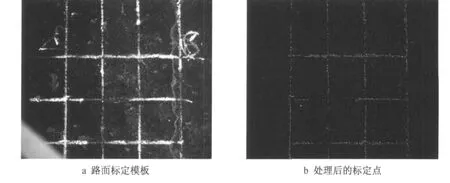
图6 路面标定Fig.6 Pavement calibration

表1 摄像机内外参数Tab.1 Camera inside and outside parameters
3.2速度计算
本文在室内地面上采用移动平台上安装CCD摄像机模拟进行方法验证,根据工程机械低速行驶速度的特点,平台以0.5m·s-1匀速直线运动下进行摄像机连续成像,应用本文方法计算各瞬时速度值得到的速度曲线如图7所示,平均速度为0.48m·s-1,速度误差为0.02m·s-1.

图7 低速时速度曲线Fig.7 Low speed speed curve
4 结语
采用车载摄像机采集路面序列图像,计算车体相对于路面的行驶速度,实现了非接触式速度的测量.该方法依靠路面视觉信息,不存在滑转等因素所造成的误差影响.此外,无需路面及车辆运动的先验信息.同时根据路面图像信息可获得车体的定位信息,本文方法对于工程机械牵引性能的实际行驶速度的计算提供了有力的技术参考价值.
[1]姚怀新.工程机械底盘及其液压传动理论[M].北京:人民交通出版社,2002.
YAO Huaixin.Engineering mechanical chassis and hydraulic transmission theory[M].Beijing:China Communications Press,2002.
[2]印祥,卢博友,钟以崇,等.拖拉机滑转率实时测量中的车速测量方法[J].农机化研究,2009(4):237-240.
YIN Xiang,LU Boyou,ZHONG Yichong,et al.Measurements of vehicle velocity in tractor accelerating slip-ratio real-time measuring[J].Journal of Agricultural Mechanization Research,2009(4):237-240.
[3]李之果,张宇波,任军霞.基于DSP的交通雷达测速仪设计[J].电子技术应用,2009(4):141-145.
LI Zhiguo,ZHANG Yubo,REN Junxia.Design of traffic radar speed gun based on DSP[J].Computer Technology and it′s Applications,2009(4):141-145.
[4]陶玉贵.车载GPS组合测速系统数据融合算法研究[J].计算机技术与发展,2009,19(1):200-203.
TAO Yugui.Study on data fusion algorithm for GPS integrated vehicle velocity testing system[J].Computer Technology and Development,2009,19(1):200-203.
[5]张利鹏,祁炳楠,赵栋杰.几种车速测量装置的工作原理与性能比较[J].公路与汽车,2008(3):40-42.
ZHANG Lipeng,QI Bingnan,ZHAO Dongjie.Several speed measurement device’s working principle and performance comparison[J].Highways and Automotiue Applications,2008(3):40-42.
[6]于起峰.基于图像的精密测量与运动测量[M].北京:科学出版社,2002.
YU Qifeng.Based on the image of precision measurements of measurement and movement[M].Beijing:Science Press,2002.
[7]周瑛、魏平.基于FPGA并行处理的实时图像相关速度计[J].光学技术,2006,32(1):108-110.
ZHOU Ying,WEI Ping.Areal-time image correlating speedometer based on FPGA parallel processing[J].Optical Technique,2006,32(1):108-110.
[8]YAMAGUCHI I.A laser-speckle stuain gauge[J].Journal of Physics:E,1981,14(5):1270-1273.
[9]PETERS W H,RANSON W F.Digital imaging techniques in experimental stress analysis[J].Opt Eng,1982,21(3):427-431.
[10]TSAI R Y.A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off the-shelf TV camera and lenses[J].IEEE Journal of Automatio,1987,3(4):323-334.
猜你喜欢
商品与质量(2021年43期)2022-01-18
汽车维修与保养(2020年11期)2020-06-09
表面工程与再制造(2019年1期)2019-12-04
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
汽车观察(2018年9期)2018-10-23
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
电子制作(2017年23期)2017-02-02
办公自动化(2016年18期)2016-12-17