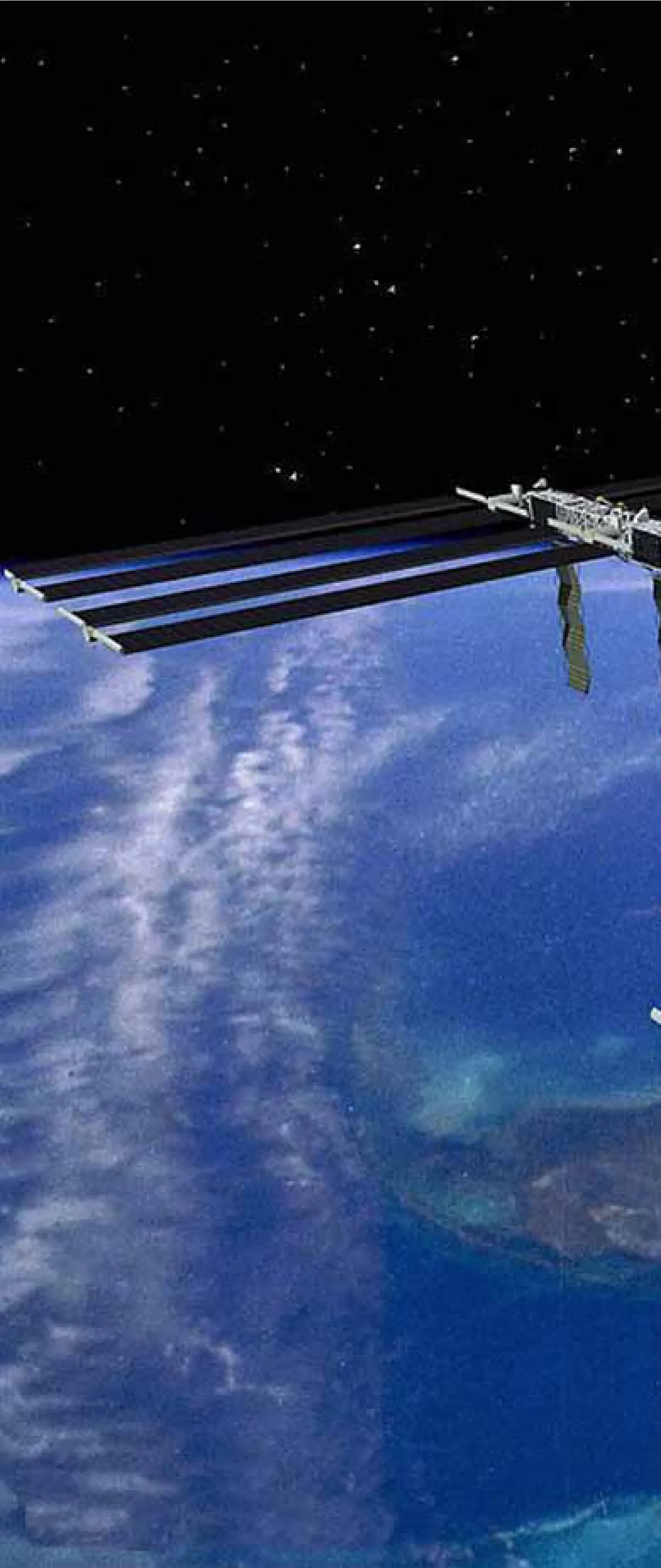
“国际空间站”各系统设计
2012-07-25 03:51范嵬娜北京空间科技信息研究所
国际太空 2012年3期
范嵬娜(北京空间科技信息研究所)
□□“国际空间站”是一个十分复杂的系统,它由电源系统(EPS),热控系统(T C S),通信与跟踪系统(C&T S),制导、导航与控制(GNC)系统,结构与机构(S&M)系统,环境控制和生命保障系统(ECLSS),指令与数据处理系统(C&DH),机器人系统(RS),飞行乘员系统(FCS),有效载荷系统(PL)10个系统组成。这些系统为航天员在站上进行科学研究提供了安全、舒适、可居住的环境,保障站上有效载荷、硬件、软件和乘员设施的正常运行。
1 电源系统
“国际空间站”的电源系统采用太阳能发电方式。站上有2个互连系统,即美国舱段的124V系统和俄罗斯舱段的28V系统,2个系统通常状态下是相互独立的,但通过直流变换器互连后可允许电力双向传输。
美国舱段电源系统是一种分配电源系统,即在局部区域(光伏太阳电池阵)产生电源,然后分配给各个舱使用。它分为3个分系统:一次电源系统、二次电源系统和辅助系统。美国舱段使用光伏电池模块(PVM)产生和贮存一次电源,一次电源被转换成二次电源,通过转换器,二次电源分出众多路径输送到“国际空间站”独立的电源用户。光电模块是增大一次电源生产能力的独立发电厂。而二次电源系统是集成到“国际空间站”的桁架、舱段和设备机柜内的本地电网。辅助分系统包括热控、接地和指令与控制。
俄罗斯舱段电源系统采用本地化体系结构,曙光号多功能货舱和星辰号服务舱都具有独立的电源系统,产生、存储和消耗各自的电能。
电源系统的技术指标如下。
(1)供电功率
站上总功率:110kW;平均功率:30kW;最小连续功率:26kW。
(2)电压体制
美国舱段:一次电源160V,二次电源124V;俄罗斯舱段:28V。
(3)太阳电池翼
总数量为8个(4对);尺寸:完全展开时,每个长35m,宽12m;完全收缩时,每个长4.57m,高51cm;每个功率为32.8kW;总面积约3000m2。
每个电池翼包括2块可伸缩的太阳电池板,中间由展开杆连接;每个电池翼包括32800块太阳电池,每块8cm×8cm;每个电池翼包括164个有源板(电池串),每个有源板包括200个太阳电池和4100个二极管。
(4)万向节
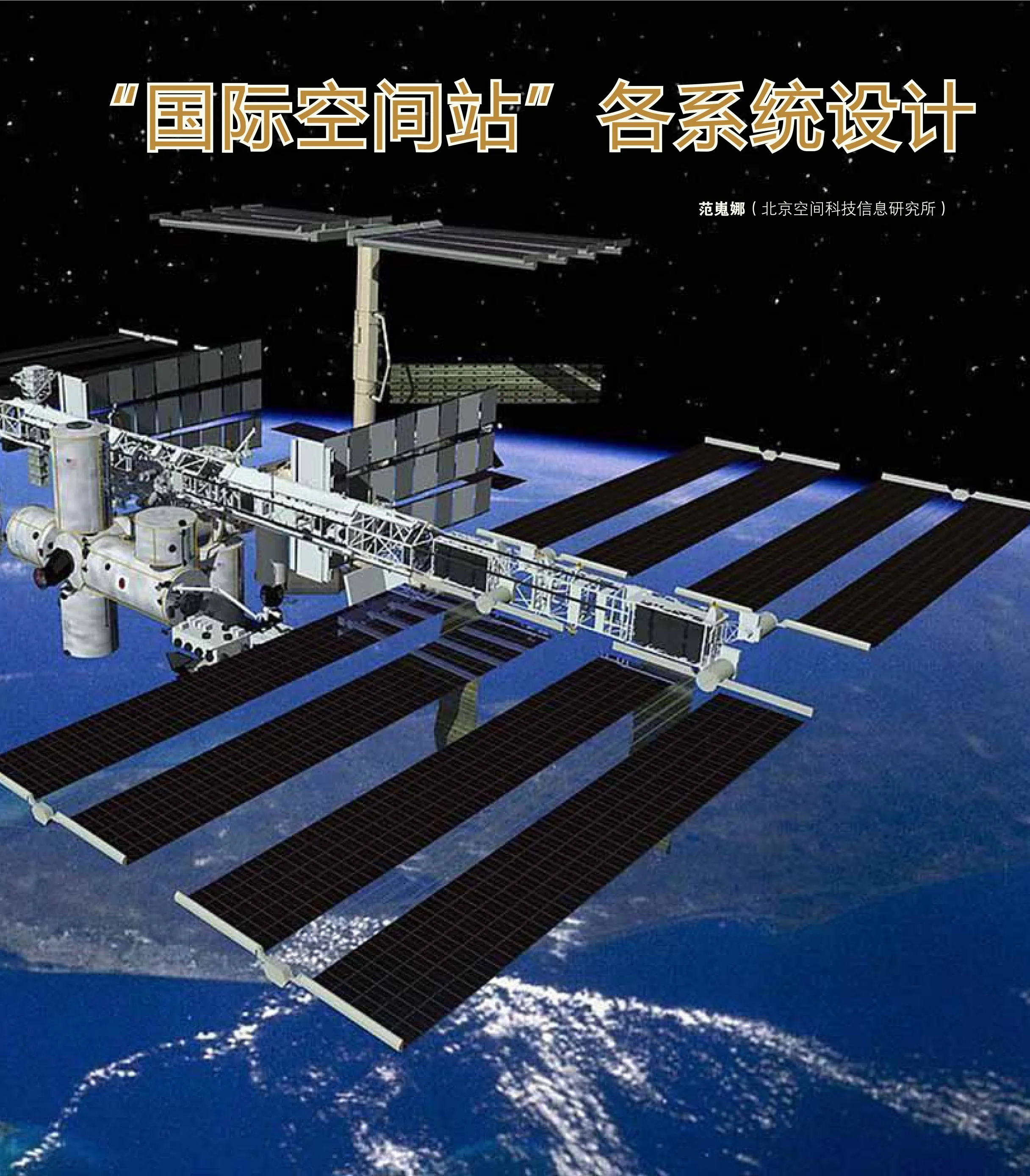
太阳电池翼装有2个太阳阿尔法旋转节(SARJ):它们是空间站主万向节,由于持续旋转保证电池阵指向太阳;装有8个贝它万向节组件(BGA):它们是单轴万向节,可连续360°旋转,用于调整角度;精度为±0.005°。
(5)镍氢电池组件
太阳阿尔法旋转节结构图
每个镍氢电池组件包括38个轻型镍氢电池,每个组件的容量为81A•h。可充电镍氢电池用于没有太阳光照射时的空间站电源供应;每90min工作35min;工作寿命6.5年。在日照区,电池由发电系统充电,在阴影区电池放电。在用电高峰或发电系统故障时,电池组也可提供电源。在正常供电情况下,电池组仅按30%的放电深度设计。
2 热控系统
“国际空间站”上的热控系统由被动热控系统和主动热控系统组成。美国与俄罗斯舱段热控分别进行控制。
被动热控系统利用多层隔热组件、热控涂层、加热器、热管等元器件,以及选择空间运行姿态的办法来维持各结构体和轨道可更换单元所需的温度范围。
在工作环境或热载荷超出了被动热控系统的热控能力时,需要采用主动热控系统。在闭合回路中,主动热控系统通过使用机械泵提供动力的流体来执行热量收集、热量传递和散热3种功能。
美国舱段的主动热控系统由舱内系统和外部系统组成,舱内系统用于收集设备产生的热量,外部系统负责将这些热量排放到空间中去。内部主动热控系统在各个加压舱中设置若干相互独立的单相水回路,采用水作为工作流体,因为它既高效又安全;外部热控采用以泵驱动的单相无水氨回路,各舱段收集的热量传输到分别安装在S1、P1桁架段处2组展开的散热器,并向外空间散热。光电模块主动热控系统采用独立的单相氨回路。
俄罗斯舱段的热控系统大体沿用和平号空间站的热控模式,即主要依靠各舱的液体回路实现各自的热量传输,以及各舱壁散热器表面排散废热。内回路以乙二醇-水为工质,外回路以有机硅液为工质,设有2套并联互为备份的舱内主冷却回路。每套内回路均有冷凝干燥换热器、可更换的泵组单元、流量调节阀和热管式舱壁恒温加热器。对高热负荷设备还采取冷却板散热措施。各舱段的热控单元既可独立运行,又能适当联合。

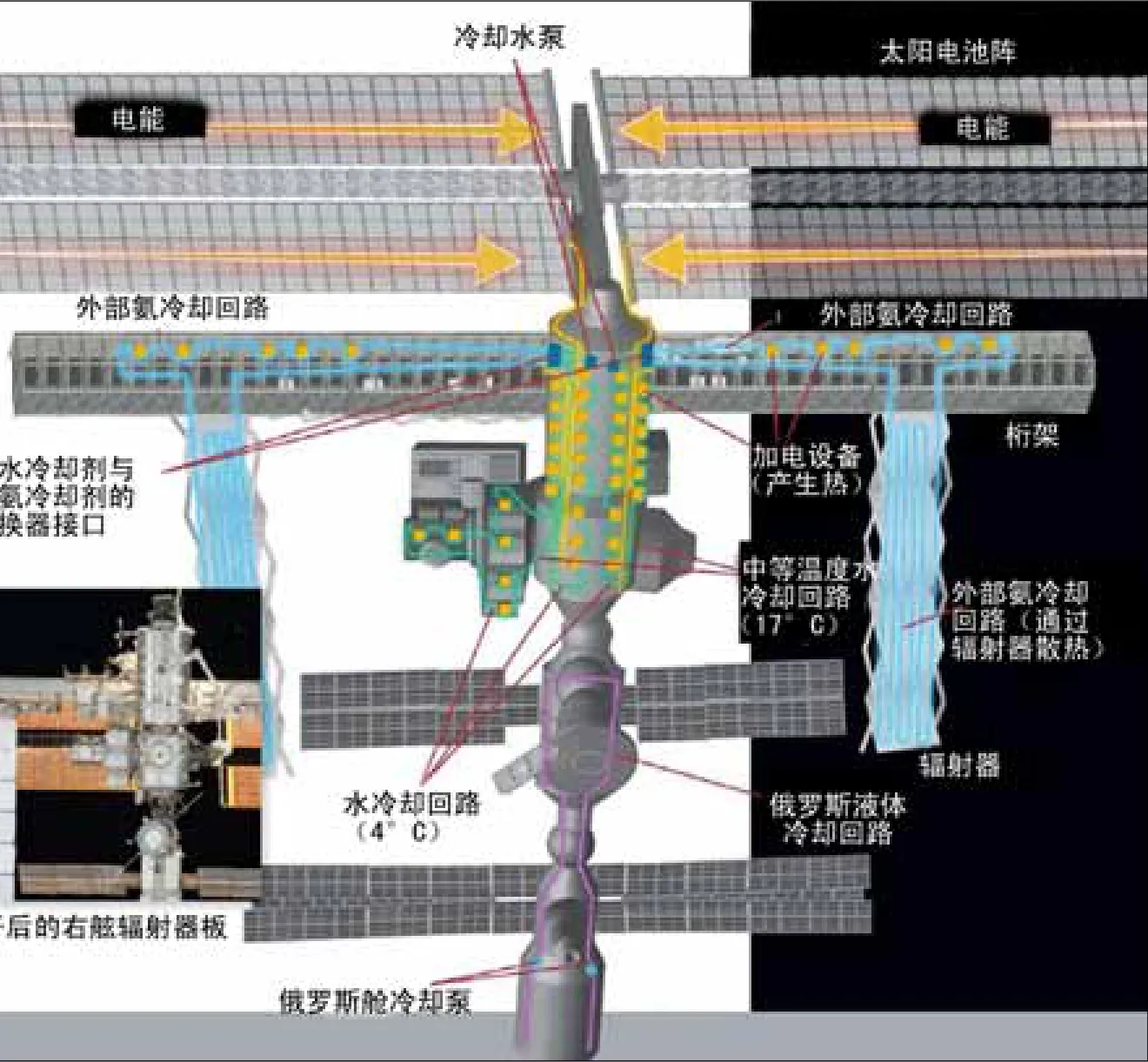
“国际空间站”热控系统
热控系统的技术指标如下。
(1)温度控制范围
“国际空间站”壁面温度:16.7~45℃,空气温度:18~27℃;
美国舱段内部主动热控系统包含2个单相水回路:低温回路和中温回路。低温回路工作温度4℃,用于生保系统舱的空气循环热交换器的热量排放;中温回路工作温度17℃,主要用于冷却安装在不同冷却板上的电子设备(表面温度为35℃时,冷却板的冷却能力大于620W)。
俄罗斯舱段:18~28℃。
(2)最大热负载
“国际空间站”总的热负载:140.5kW,其中美国102kW,俄罗斯38.5kW。
(3)多层隔热组件
它由中间带有涤纶网(用于绝缘)的20层双镀铝聚酯薄膜(DAM)组成,密度约1.2kg/m2,平均有效辐射率是0.035,铝覆盖外层。
(4)表面涂层
采用作阳极化处理的涂层与油漆。
3 通信与跟踪系统
“国际空间站”通信与跟踪系统
通信与跟踪系统关系到“国际空间站”稳定运行所要求的安全性和可靠性,以及空间站上科学研究数据的获取。“国际空间站”通信与跟踪系统任务包括:
• 提供“国际空间站”上航天员间的双向话音和视频通信,包括舱外活动;
• 提供“国际空间站”与休斯敦任务控制中心(MCC-H)的飞行控制组以及与地面的有效载荷专家间的双向话音、视频通信和文件传输;
• 提供“国际空间站”与有效载荷操作中心(POIC)的单向通信;
• 接收休斯敦任务控制中心和轨道器发送的指令,通过飞行控制器操控“国际空间站”;
• 向休斯敦任务控制中心和有效载荷操作中心发送系统和有效载荷的遥测数据。
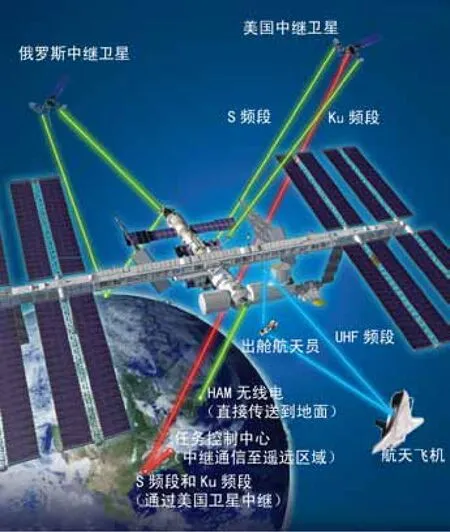
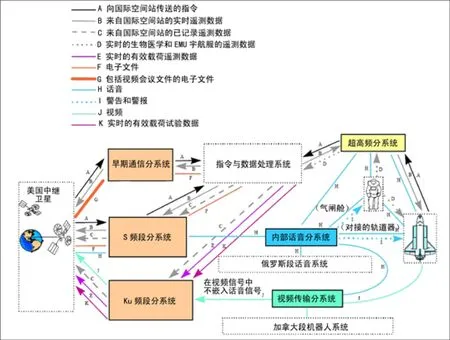
通信和跟踪系统包括6个分系统:①内部话音分系统,用于“国际空间站”上内部的话音通信,具有与外部连接的接口;②S频段分系统,用于传输话音、指令、遥测和文件数据;③超高频分系统,用于舱外活动和接近操作;④视频传输分系统,用于“国际空间站”上内部的视频通信,也与外部连有接口;⑤Ku频段分系统,用于有效载荷数据和视频业务的下行链路以及双向文件传输业务;⑥早期通信分系统。6个分系统协同工作,提供“国际空间站”各项任务所需的通信业务。
通信和跟踪系统的技术指标如下。
各分系统间通过1553B总线通信。
1)S频段:2.025~2.2110GHz下行链路;2.2~2.29GHz上行链路;由2套完全相同的线路组成(S1桁架和P1桁架上),2套设备互为备份。
2)Ku频段:10.7~12.2GHz下行链路;14~14.5GHz上行链路;提供3Mbit/s的前向链路码速率;包括1套线路(Z1桁架上);覆盖率约70%。
3)俄罗斯舱段误码率:指令误码率小于10-6;遥测误码率小于10-3。
4 制导、导航与控制系统
制导、导航与控制系统的主要任务是在空间站的整个飞行任务期间,维持空间站在各种工作模式下的正常运行以及与其他航天器或舱段进行交会、停靠、对接和分离操作所要求的全部制导、导航与控制任务。制导、导航与控制系统支持6大功能:制导、状态测量、姿态测量、指向和支持、位移控制以及姿态控制。
“国际空间站”通信与跟踪系统
“国际空间站”有2个独立的制导、导航与控制系统:俄罗斯舱段运动控制系统(MCS)和美国舱段的制导、导航与控制系统。2个系统互为备份,提高了任务的安全性。但只有俄罗斯舱段有推进功能,只有美国舱段有指向和支持功能。
制导功能主要由俄罗斯舱段提供,指导空间站选择最佳行进路径,美国舱段制导、导航与控制系统也为“国际空间站”提供一些制导规划支持。
导航包括状态测量、姿态测量、指向和支持三大功能。它主要依赖于美国GPS的数据来确定“国际空间站”的位置、速度和姿态,美国2套“速率陀螺组件”也会产生一些姿态数据,作为GPS数据的补充。而俄罗斯GLONASS为俄罗斯运动控制系统提供数据。俄罗斯也通过使用跟踪恒星、太阳及测量地平线的传统方法来确定“国际空间站”姿态。
控制包括位移控制(轨道提升)以及姿态控制(保持“国际空间站”方位)。它用于轨道提升的再推进,主要通过对接在“国际空间站”上的俄罗斯进步号系列飞船和欧洲的“自动转移飞行器”主发动机点火完成,再推进指令由莫斯科任务控制中心控制。姿态控制主要是控制空间站的旋转,主要方法是使用安装在Z1桁架上的控制力矩陀螺(CMG)。当干扰力矩超出控制力矩陀螺能力即控制力矩陀螺出现饱和状态后,将启动俄罗斯的推力器进行姿态控制。
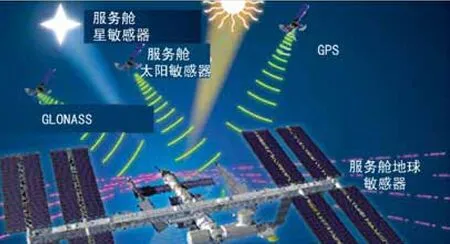
“国际空间站”导航定位体系
制导、导航与控制系统的技术指标如下。
(1)姿态控制
它能够在控制力矩陀螺控制下进行当地坐标系统(LVLH)的姿态保持;可在反作用控制系统(反作用控制系统)控制下进行瞬时姿态机动;姿态指向精度:±0.1°/轴;在静态条件下姿态与姿态速率的稳定度为:每轴姿态±0.1°;每轴姿态速率±0.02(°)/s。
(2)控制力矩陀螺
数量:4个;质量:300kg(每个);自由度:2;每个控制力矩陀螺包括1个不锈钢飞轮:质量100kg,旋转速度6600r/min,产生角动量4880N·m/s,产生257N·m的转矩。
(3)24台反作用推力器的反作用控制系统(RCS)
反作用控制系统为“国际空间站”的轨道保持、粗略/瞬间稳定操作及避碰等提供控制,并作为控制力矩陀螺控制系统的补充备份。喷气驱动机构和发动机装置均按模块化设计,便于维护与更换。
5 系统结构和机构
“国际空间站”的系统结构用来保护航天员在极为恶劣的太空环境下生存。机构的作用则是将各个系统结构连接在一起,或是临时固定各项载荷设备。
“国际空间站”上的系统结构主要分为加压舱和桁架两类。
加压舱包容着航天员进行工作和生活的大气环境。它又可分为主要结构和次要结构两部分。其主要结构部分由1个环状机构和1个纵梁加固压力壳组成。环状机构用来承受载荷并固定纵梁和壳层。纵梁用来增强壳体的刚度,从而增强整个舱体的负载能力。其次要结构的主要功能是帮助航天员和载荷的正常工作、支持相关设备以及防护空间碎片。次要结构相对于主要结构来说既包括舱内部分又包括舱外部分,例如支架和机柜都是舱内的次要结构。舱外的次要结构包括航天员舱外机动辅助装置、紧固装置、护窗板和微流星体/空间碎片防护装置。
桁架相当于“国际空间站”的脊柱,用于固定空间站的各部分组件。桁架中还包括电线和冷却管、机动运输轨以及诸如连结点之类的机械系统。“国际空间站”的桁架包含两种桁架技术:综合桁架结构(ITS)和俄罗斯的科学动力平台(SPP)。前者由10个铝质单件组成,组装完成后长达100m。已取消的后者原计划位于星辰号服务舱的顶端,高8m,由俄罗斯建造。
机构用来连接“国际空间站”上的各个组件、对接飞船或是对一些载荷进行临时的固定。大部分机构都是一次性的,而那些用来连接对接飞船和用作临时固定的机构则能多次重复使用。例如通用对接机构(CBM)、实验支架装置(LCA)、段-段固定装置(SSAS)和异体同构周边对接机构(APAS)。通用对接机构用来将2个加压舱对接在一起(美国部分),分为主动部分和被动部分:主动部分包括环形结构、捕获锁、对准导向件、电动螺栓和控制器面板,被动部分包括环形结构、捕获锁、对准导向件和螺母。实验支架装置的作用是在“国际空间站”组建过程中固定桁架S0。综合桁架结构各段是通过段-段固定装置连接在一起的,尤其是S3、S4、S1、S0、P1和 P3、P4。S5、S、P5和P6段则是由航天员在舱外组装的。异体同构周边对接机构有两个功能:一是用来对接飞船和航天飞机,另外是将曙光号多功能货舱固定在加压匹配适配器-1(PMA-1)上。
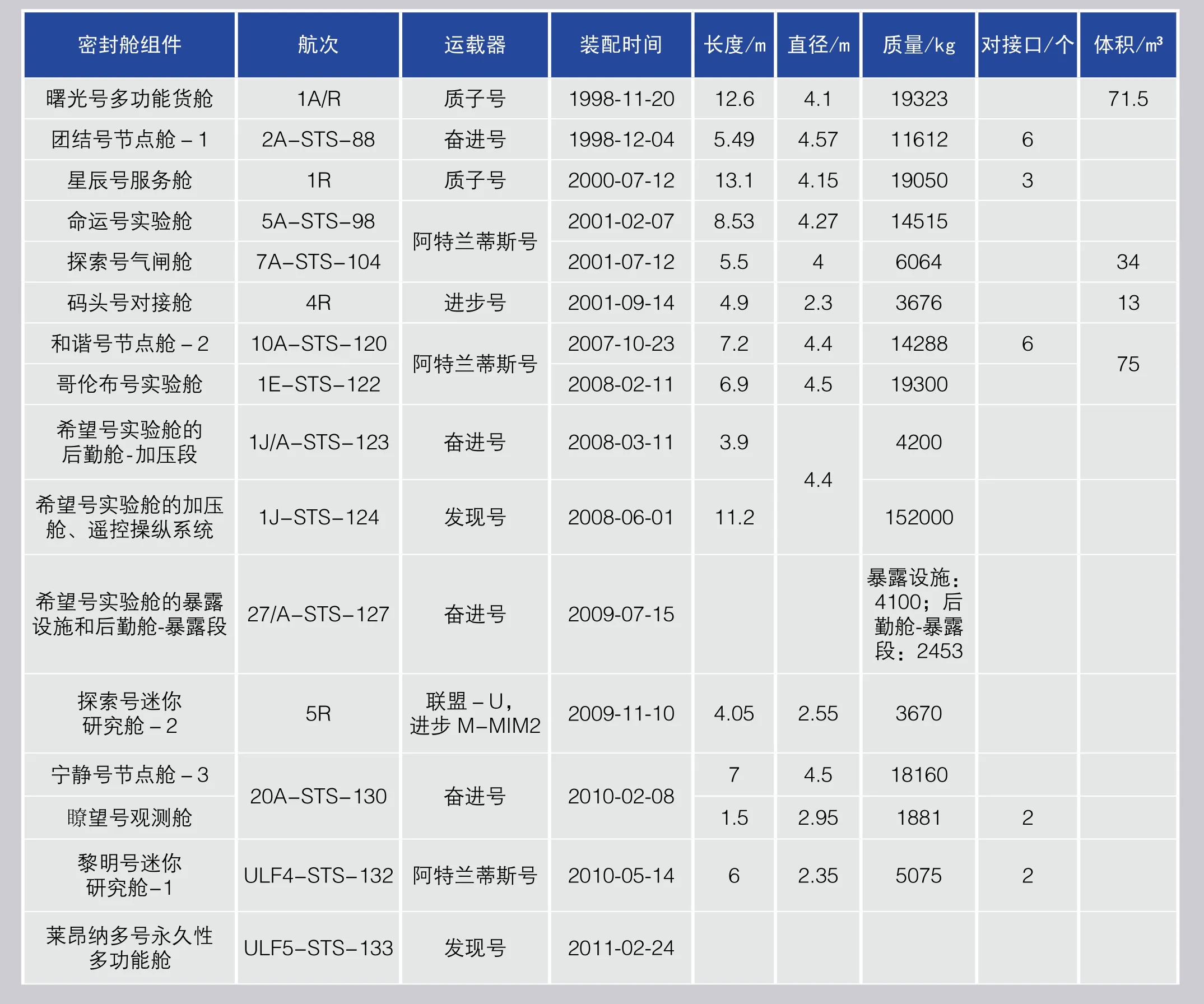
“国际空间站”现有密封舱组装顺序及性能指标
6 环境控制和生命保障系统
环境控制和生命保障系统为航天员提供了一个工作和生活的安全居住环境,该系统设计的中心是如何利用最新的技术来实现“国际空间站”上资源消耗的最小化。其能力由美国和俄罗斯的生命保障设备联合提供。
环境控制和生命保障系统在结构和功能分为5个分系统。
1)大气再生分系统(AR)主要控制人体代谢产生的二氧化碳和大气中的痕量污染物,通过再生方法提供人体与其他生物呼吸所需要的氧,检测站内大气的主要组成成分(包括二氧化碳、氧、氮、氢、甲烷和水蒸气),并控制大气中的微粒和微生物。
2)温湿度控制分系统(THC)主要控制载人舱的温度与湿度,通过空气冷却产热的仪器设备,为使航天员舒适和维持站内大气的二氧化碳、氧及痕量污染物的整体水平控制进行舱内与舱间的通风。
3)大气控制与供给分系统(ACS)在常压和在气闸舱70kPa气压条件下,控制大气的总压与氧分压,座舱大气的升压和降压,总压和气压升降率的监测,进行舱段间的气压平衡,提供储存的氮和氧。
4)水再生与管理分系统(WRM)提供饮用水和卫生用水,废水和尿中水的收集、再生与处理。
5)火情检测与灭火分系统(FDS)主要功能为火烟检测和灭火。
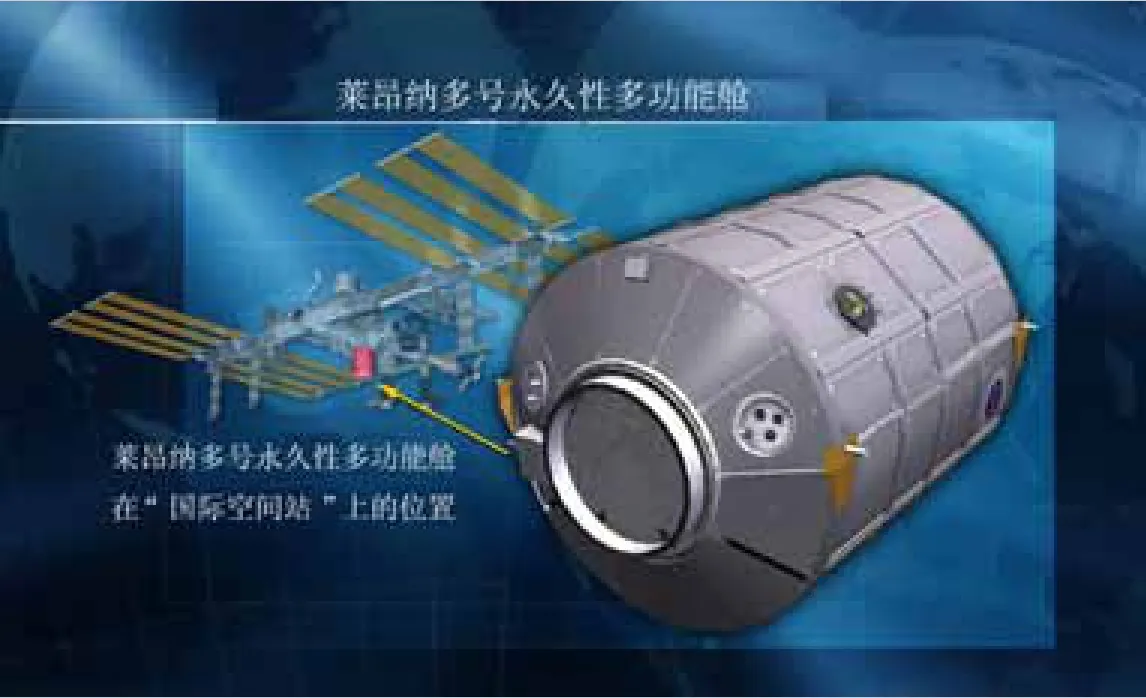
莱昂纳多号永久性多功能舱
环境控制和生命保障系统的技术指标如下。
(1)俄罗斯舱段
• 居住舱总压:97.622~102.41kPa,最小93.1kPa;
• 氧分压:19.418~23.674kPa,最大体积浓度24.8%;
• 二氧化碳分压:0.798kPa(最大);
• 氮气压力:79.8kPa;
• 空气温度:18~28℃;
• 空气循环率:0.1~0.4m/s;
• 噪音水平:60dB(最大);
• 空气漏率:0.02千克/天;
• 相对湿度:30%~70%;
• 露点温度:4.4~15.6℃;
• 电解制氧装置能够满足3~4人/天的耗氧量,功耗约1kW;
• 水供应系统为每位乘员每天提供2~5L个人卫生用水。
(2)美国舱段
• 大气压力:101025Pa(21%氧气、78%氮气),大气总压范围97.9~102.7kPa;
• 氮气补加量不小于0.1kg/min,标准压力517~827kPa,最大压力不大于1379kPa;
• 氧分压:20.7kPa<氧分压≤50.6kPa;
• 二氧化碳控制:浓度小于0.7%;
• 空气温度:18~27℃;
• 相对湿度:25%~70%;
• 露点温度:4.6~15.5℃;
• 温湿度控制的设计要求:热清除能力3.5kW;通风流量分别为194L/s(美国实验舱内)、142L/s(节点1号舱)、66L/s(舱之间);温度控制范围为18.3~26.7℃;
• 航天员能量代谢指标:舱内活动时期每人每天11.51×106J。
7 指令与数据处理系统
“国际空间站”有各种计算机100多台,主要用于收集来自站上各系统和有效载荷的数据,并利用各种软件对这些数据进行处理,并将指令分配给相应的设备。指令与数据处理系统有3个主要功能:提供相应的软件和硬件计算资源,用于支持“国际空间站”核心系统的指挥与控制,支持“国际空间站”上的科研项目,并可为乘员和地面运营提供服务;提供指令与数据处理系统内部的时间基准并提供给其他系统;还支持其他系统的功能。
“国际空间站”的指令与数据处理系统由美国指令与数据处理系统、俄罗斯站上组合体控制系统(OCCS)、加拿大计算机系统、日本数据管理系统和欧洲数据管理系统组成。

“国际空间站”上的俄罗斯曙光号多功能货舱和星辰号服务舱
美国指令与数据处理系统提供站级控制软件,用于保证站内各部分协同工作。在整个空间站上安装了不同类型的乘员接口计算机,空间站上所有的计算机系统都有警告与预警能力,各国都在其部分内有许多数据处理计算机和数据总线。在各国计算机系统之间由多段数据总线进行连接,用于保证站级控制软件、乘员接口计算机输入、警告与预警系统信息、数据处理计算机以及相关的总线在站内协同工作。
“国际空间站”站级控制软件包括7种控制模式:标准、微重力、再推进、接近操作、外部操作、生存和保证乘员安全返回。乘员接口计算机有7种类型,警告与预警功能分4级。
美国指令与数据处理系统的体系结构分为3层。最低的第三层是用户层,接收传感器或效应器的数据;中间的第二层是局域层,使用系统专用软件;最高的第一层是控制层,使用站级控制软件。传感器的数据自下层上传,指令自上层下传至效应器。
指令与数据处理系统的硬件主要是多路调制/解调器(MDM)、总线和载荷网部件。“国际空间站”的多路调制/解调器是一个多路调制/解调器和一个计算机处理器的结合,它的主卡是80386SX。多路调制/解调器访问的数据与指令的交换通过l553B 总线,它由两股双绞屏蔽的铜线组成,虽然数据传递的速度较慢,只有1Mbit/s,但被证明在空间非常可靠。有效载荷网部件包括载荷多路调制/解调器、载荷1553B总线、自动载荷开关、载荷以太中枢通路和附加以太光纤载荷网。
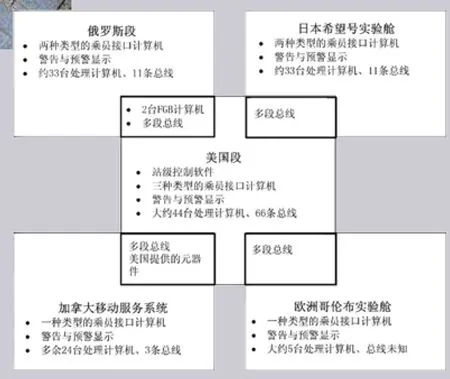
“国际空间站”站级计算机系统
俄罗斯组合体控制系统和美国指令与数据处理系统计算机系统体系结构是非常类似的,都可以分为3层,但俄罗斯舱段在名称上没有使用“层”。俄罗斯组合体控制系统采用自给自足、基于曙光号多功能货舱和星辰号服务舱的体系结构。基于舱的计算机系统与中心计算机连接。美国和俄罗斯系统都有冗余设计,俄罗斯组合体控制系统比美国指令与数据处理系统的冗余度更高。美国和俄罗斯系统通过几条1553B多段数据总线连接,互相交换系统健康和状态信息、模式指令及详细的制导、导航和控制数据。
8 机器人系统
“国际空间站”上的机器人系统用于空间站大型构件的转运与组装,协助航天员完成空间站上的设备维护、修理和更换,支持航天员舱外活动和有效载荷的操作与管理。
“国际空间站” 的机器人系统包括加拿大航天局研制的“移动服务系统”(MSS)、日本希望号实验舱上的“遥操作系统”(RMS)和欧洲航天局研制的安装在俄罗斯舱体上的“欧洲机械臂”(ERA)和俄罗斯自行研制的机械手设备。
“移动服务系统”包括5个分系统:空间站遥操作系统(SSRMS)、专用灵巧机械手(SPDM)、移动基座系统(MDS)、移动搬运器(MT)和机器人工作站(RWS)等组成,其中后两项为美国研制。
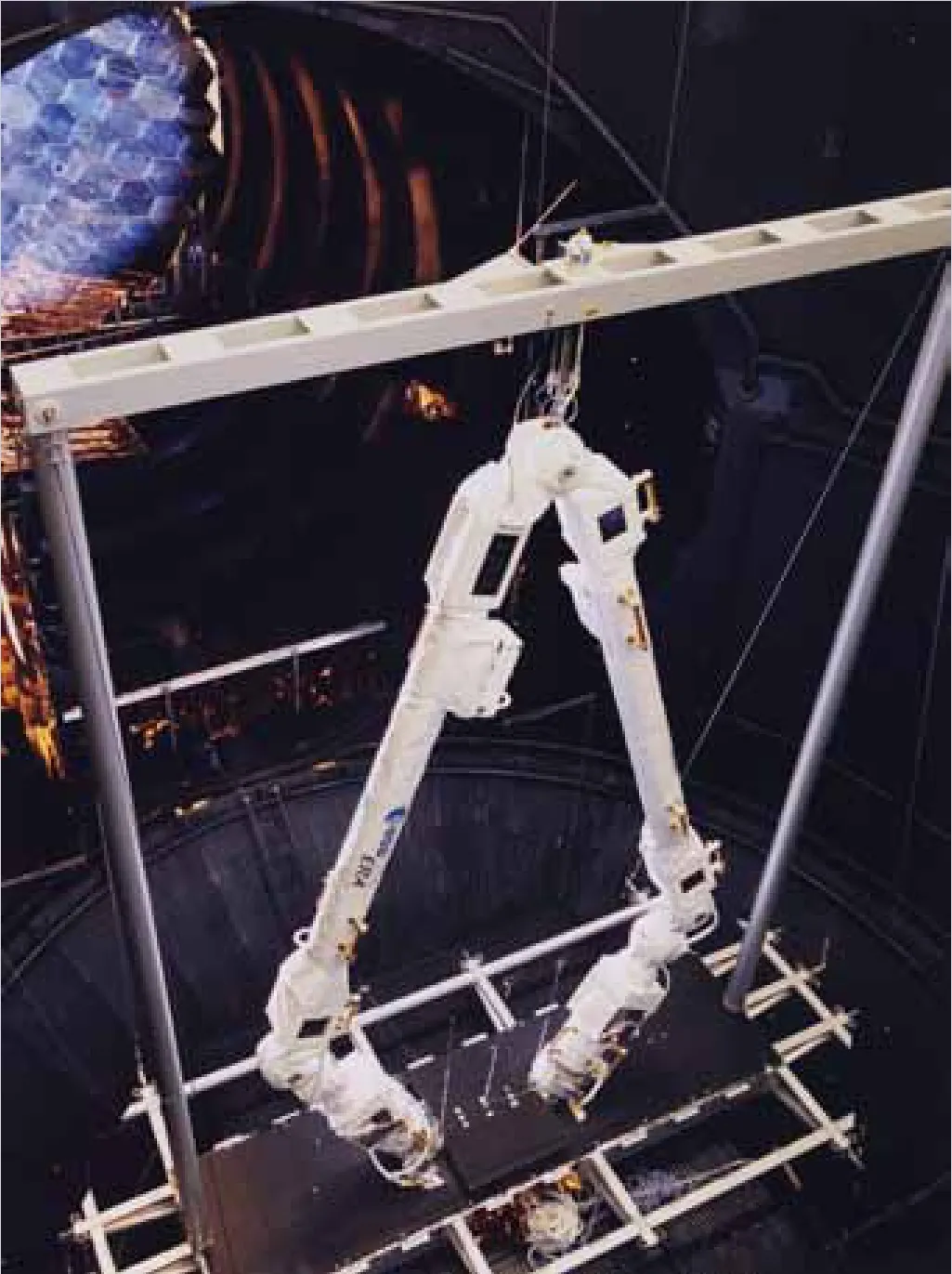
日本实验舱上安装的“遥操作系统”。它由主机械臂(MA)和小型精密机械臂(SFA)和控制柜组成。他们相互配合,用于实验设备和物资的转移和安装、空间微重力环境的材料加工、高能辐射探测等任务。
“欧洲机械臂”主要用于“国际空间站”俄罗斯部分的部件的装配、维修和舱外服务,并可对航天员的舱外活动提供支持。
机器人系统的技术指标如下。
(1)加拿大“移动服务系统”
空间站遥操作系统全长1 7.6 m,总质量1800kg,机械臂包络直径350mm,7自由度,峰值功耗2kW,平均功耗435W。臂的两端各安装一个末端操作器。可使机械臂以任何一端附着在空间结构上作为支撑点,工作半径14.44m,端点位置精度45mm,空载最大移动速度37cm/s,满载移动速度1.2cm/s,最大负载116t。转动关节的最小输出力矩:1044N·m(驱动模式);1630N·m(制动模式)。
专用灵巧机械手具有精确和灵活的操作功能,重复精度达1.25mm。高3.67m,宽(肩宽)2.37m,每个手臂长3.35m,质量约1560kg,操纵能力600kg,定位精度0.002m,测力精度2.2N,平均运行功率1.4kW。
移动基座系统是空间站遥操作系统的基座,专用灵巧机械手在非工作状态时也固定在基座上。移动基座系统安装在移动搬运器上,依靠后者在轨道上移动。2台机器人工作站是系统的控制部分,分别安装在美国实验舱和瞭望号观测舱中。后者可提供航天员对机器人操作的观察和监视。
(2)日本“遥操作系统”
日本“遥操作系统”主机械臂长9.71m,由6个关节、3个臂、1个末端操作器、1个基座和2个视觉装置组成,质量375.5kg。端点力70N,端点力矩弯曲140N•m、扭转200N•m。端点速度空载45cm/s,满载4.5cm/s,最大负载7000kg,定位精度±50mm。它主要用于处理较大的载荷。它的顶端安装有小型精密机械臂。小型精密机械臂由6个关节、2个臂、1个末端操作器、1个力矩传感器和1个电视摄像装置组成。长1.6m,质量85.5kg。端点力30N,端点力矩弯曲与扭转均为4.5 N•m。端点速度空载49cm/s,满载4.9cm/s,最大负载700kg,定位精度±10mm。
(3)“欧洲机械臂”
“欧洲机械臂”总长11.3m,有效长度9.7m,质量650kg,具有7自由度(1个轴关节和2个3自由度的腕关节)的对称结构。两端各有一个末端操作器,一个用于固定在空间站结构上,起支撑作用;另一个用于机械操作。也可利用两者,实现在空间站上的移动。
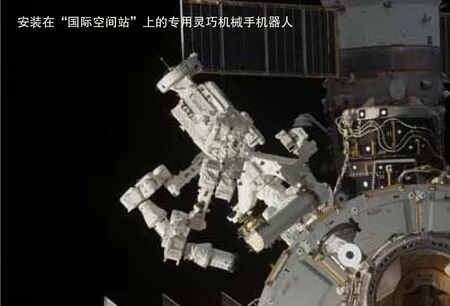
安装在“国际空间站”上的专用灵巧机械手机器人
“欧洲机械臂”
9 飞行乘员系统
飞行乘员系统是一个广泛分布的系统,用于在任务期间支持乘员健康和保证乘员的工作。功能包括:①支持乘员健康保持和对抗长期微重力失调效应;②人类生理心理因素、居住条件和乘员膳宿;③保障日常和紧急情况的供应;④“国际空间站”站务管理和维护;⑤乘员个人和任务支持设备。
(1)乘员支持设施
• 厨房和食物系统:满足乘员的基本营养和生物医学需要,并提供乘员间交流和社交活动的机会;
• 乘员居住单元:为乘员提供睡眠、换衣服、装私人物品,以及在不执行任务时消磨私人时光的私人空间;
• 废物收集间和个人卫生设施:包括座便器/小便池、乘员的个人卫生(洗漱、刮脸、口腔卫生等)设施。
(2)乘员支持设备和供应
• 限位器和移动辅助装置:使乘员能够被舒适的限制和稳定在工作位置上,保持在微重力条件下的自然姿态和移动自由;
• 乘员工作和个人用品:包括乘员完成每日计划工作任务和非工作时间的用品,包括衣物、照相机、工具(如计算器、铅笔)、休闲设备(如小型碟片、书籍、磁带)、乘员私人卫生用品、私人辐射剂量仪,以及乘员私人物品(如家人相片、日记本);
• 便携式紧急状况供应品:在紧急情况(如火灾、舱内气压下降)或撤退或补给飞行失效的情况下,为支持乘员而专门提供的;
• 在轨维修、工具和诊断设备:帮助乘员诊断问题、维修和测试“国际空间站”设备;
• 站务管理和垃圾管理:用于乘员在舱内进行日常清洁(如清洗过滤器)和干湿垃圾处理;
• 货物运送、堆积和库存管理;
• 照明;
• 识别标记和标牌。
(3)乘员卫生保健系统
提供保障长期载人飞行过程中航天员健康和安全性所必需的医疗和环境能力。包括3个分系统:
• 对抗系统(CMS):保护乘员的心血管、肌肉和骨骼由于长期在微重力环境中引发的失调;
• 环境卫生系统(EHS):监测气体污染、微生物污染、水质、噪音和辐射水平等;
• 健康支持系统(HMS):为乘员提供预防、诊断和治疗,并能在需要时支持病人的运送。
10 有效载荷系统
“国际空间站”的目的是提供在太空开展科学研究的永久性平台。“国际空间站”开展研究的优势在于微重力环境、近地轨道的有利位置以及可以开展较长时间的实验。“国际空间站”科学研究领域包括生命科学、微重力科学、空间科学、商业产品开发和工程研究与技术。
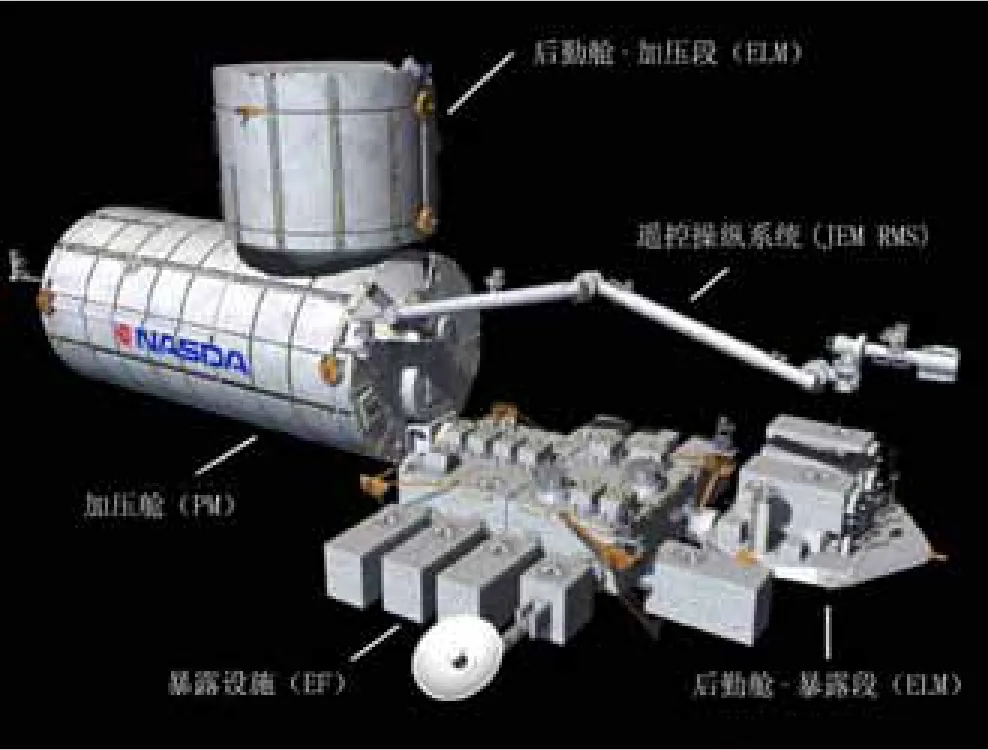
日本希望号实验舱
“国际空间站”上共有4个实验舱、33个国际标准有效载荷机柜(ISPR)可用于安装有效载荷,进行科学研究与实验。
“国际空间站”中的内部载荷多安置在国际标准有效载荷机柜上。每个国际标准有效载荷机柜尺寸为2m×1.05m×0.859m,可以提供1.571 m3内部空间。每个机柜自质量104kg,可承载700kg的有效载荷。“快车”(EXPRESS)机柜是标准多功能载荷机柜,可提供结构接口、动力、数据、冷却、水和其他科学实验必需的条件。
有效载荷系统构成如下:
• 美国命运号实验舱;
• 设施级有效载荷(长期或永久的有效载荷):包括“快车”机柜系统、先进人员支持技术(AHST)、人体研究设施(HRF)、-80℃实验室制冷器(MELFI)、材料科学研究设施、微重力科学手套、流体与燃烧设施、X射线晶体学设施、生物工艺学设施;
• 位于桁架或暴露设施上有效载荷:S3桁架段上4个位置,P3桁架段上2个位置,日本实验舱暴露设施上10个位置;
• 日本希望号实验舱;
• 欧洲哥伦布号实验舱;
• 俄罗斯探索号迷你研究舱-2。
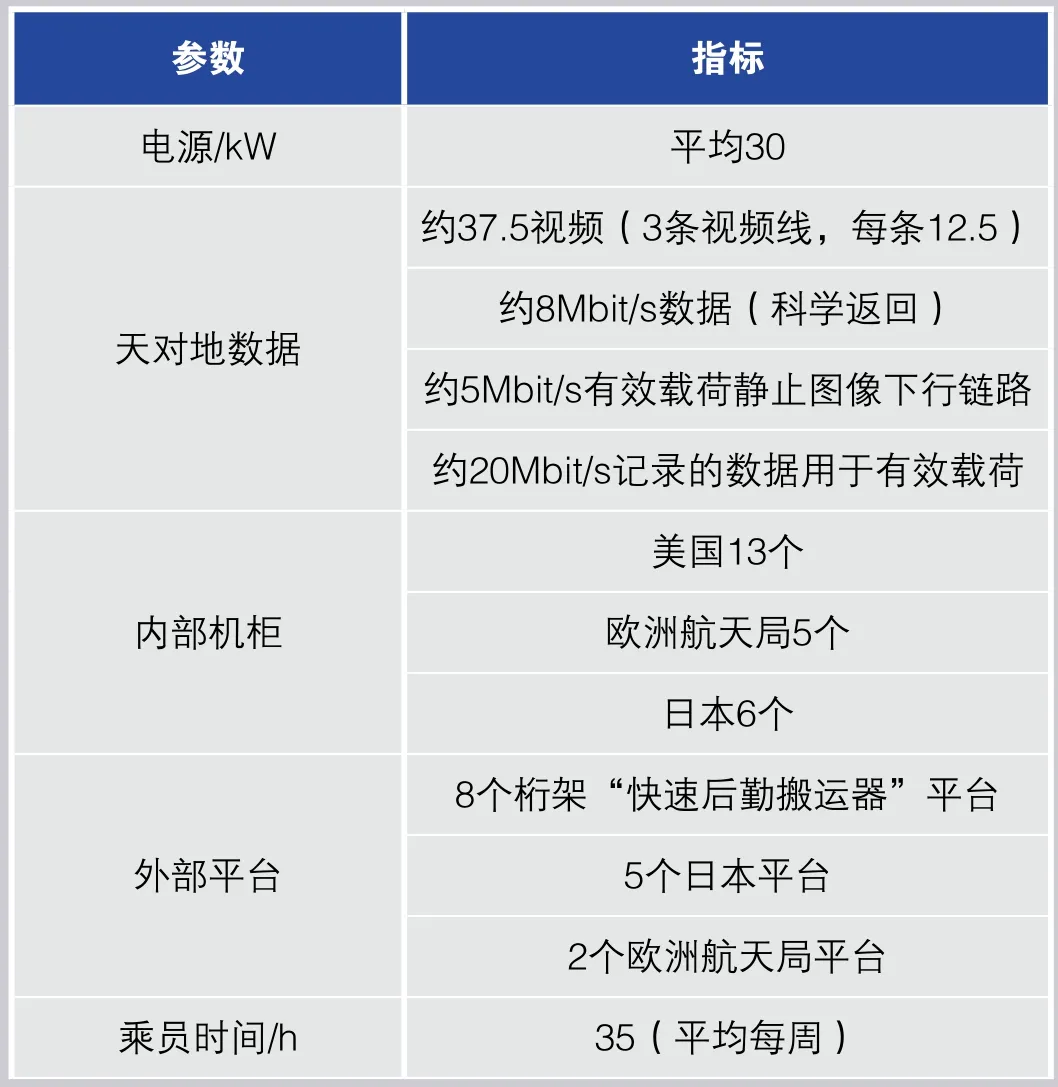
向有效载荷提供的在轨资源
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
军民两用技术与产品(2022年1期)2022-06-01
太空探索(2022年3期)2022-03-28
国际太空(2021年8期)2021-11-05
军民两用技术与产品(2021年12期)2021-03-09
航天工业管理(2020年3期)2020-07-25
太空探索(2020年5期)2020-05-19
航天器工程(2018年4期)2018-09-15
舰船科学技术(2018年7期)2018-07-25
汽车电器(2018年1期)2018-06-05