
北斗卫星后向散射信号的星-星合成孔径成像系统:概念与可行性
2012-07-24 06:51:28王海洋江月松
雷达学报 2012年2期
王海洋* 江月松
北斗卫星后向散射信号的星-星合成孔径成像系统:概念与可行性
王海洋江月松
(北京航空航天大学电子信息工程学院 北京 100191)
该文提出了一种利用北斗卫星的后向散射信号形成的星-星双站合成孔径成像系统的概念,建立了该成像系统的北斗地球静止轨道卫星和地球同步轨道卫星以及地面站之间的几何模式,并依此模式和双站合成孔径雷达成像原理,从成像分辨率、信噪比、链路收支等性能参数论证了利用北斗卫星建立星-星双站合成孔径雷达对地成像观测的可行性,此外还提出了该系统在土壤湿度探测、地表演化的时空动力学特征研究、大气特性研究方面的遥感应用前景。
北斗卫星;双站;星-星合成孔径成像;对地观测
1 引言
中国正在建设的北斗卫星导航定位系统(Compass Navigation Satellite System, CNSS),其目的是完成对地面各种目标的定位、导航、授时、监测和管理等。该系统由若干颗静止轨道卫星和若干颗地球同步轨道卫星构成,其中的地球静止轨道卫星在工作时,上行链路使用L波段(1.610 GHz-1.6265 GHz),下行链路使用S波段(2.4835 GHz-2.50 GHz)。北斗卫星系统的建设目标是提供在中国及其周边地区范围内的定位、授时、报文和GPS广域差分等服务功能,但设计和建造目标中没有成像观测服务功能。实际上,还可以进一步开发利用地面对北斗系统中的地球静止轨道卫星向地面发射的微波信号的散射信号,形成对地成像观测能力,以致在几乎不增加原建设成本的情况下,增加北斗系统的成像观测功能。本文基于中国北斗卫星系统的现状,结合合成孔径成像雷达原理,提出再次利用北斗系统中的地球静止轨道和同步轨道卫星以及地面接收站,实现双站合成孔径成像雷达的系统的设想,对于发展具有中国自主知识产权的、集导航、定位、授时、通信以及合成孔径成像对地观测于一体的卫星系统,具有极为重要的意义。
本文进一步发展我们已经提出的利用北斗卫星反射信号的空间-地表合成孔径成像雷达系统,提出了另一种新形式的双站合成孔径雷达系统。这里提出的系统概念是:用一颗轨道平面与赤道平面有微小倾角的地球同步轨道卫星作为接收机,接收由北斗系统中与同步卫星靠近的一颗地球静止轨道卫星辐射到地面上的后向散射信号,再将所接收的信号发射至地面接收站,地面接收站同时接收来自静止轨道和同步轨道卫星的信号,并按照合成孔径雷达成像方法进行互相关和成像处理,就可能产生对观测地面的有用图像。本文将从此概念出发,建立基于静止轨道卫星和同步轨道卫星的合成孔径成像雷达的几何关系,并从成像分辨率、信噪比、链路收支等方面论证合成孔径雷达成像原理和可行性,并展望系统在土壤湿度探测、地表演化的时空动力学特征研究、大气特性研究方面的应用前景。对于双站合成孔径成像系统而言,同步问题(时间同步/空间同步)是极为关键的问题,我们今后会持续深入研究。
2 系统构成方式
图1是基于北斗卫星的合成孔径雷达系统示意图。图中是处于地球静止轨道上的北斗卫星,它向地面发射宽带微波信号,合成孔径雷达的同步轨道卫星收集从卫星覆盖的范围内散射的信号并立即再将这些信号发向地面接收站,地面接收站同时接收和发来的信号,并对所接收的信号进行处理便可形成卫星所观测的地表图像。因此,在卫星上不需要大的计算量。地面接收站处即为GPS接收机,其接收性能与GPS接收机性能相同。
应用同步轨道卫星的主要原因是使被观测目标与接收天线之间有相对运动以便形成合成孔径。此外,为了使避免直接接收太强的的信号,与不在同一经度上,在经度上偏离一定的角度。因卫星轨道与赤道平面有偏离,所以相对于地球是一个北-南方向的简谐运动(实际上在空中形成一个“8”字,但在“8”字形中间,卫星相对运动轨迹近似为直线,且因为卫星运动轨道严格已知,所以可以通过运动补偿来消除空间曲线运动),通过调节卫星的离心率和轨道平面的倾角还可以在空中形成圆或椭圆等形式的航迹。因地球静止轨道对卫星轨道的扰动很小,改变卫星航迹所需的能耗很小。

图1 基于北斗或通信卫星的被动双站合成孔径雷达示意图
与图1相对应的合成孔径成像系统的几何关系如图2所示。图2中,是位于赤道平面上的地球静止轨道上的北斗卫星,相对地面静止,发射微波波束照射地球表面;是偏离赤道平面的位于地球同步轨道上的形成被动合成孔径的成像雷达卫星,相对于地面有相对运动,它收集地表对卫星信号的散射信号。是卫星离开的距离,(,)代表卫星和点目标()的距离,也即随时间变化的斜距。()表示卫星与点目标的距离。()表示卫星到地面站的距离。是卫星到地面站的距离是最短斜距。若只考虑信号性质,可以看作。
若卫星偏离赤道的最大距离为50 km,则卫星的轨道倾角约为0.06794º(见图3),则卫星在赤道惯性坐标系(图3)中的位置为
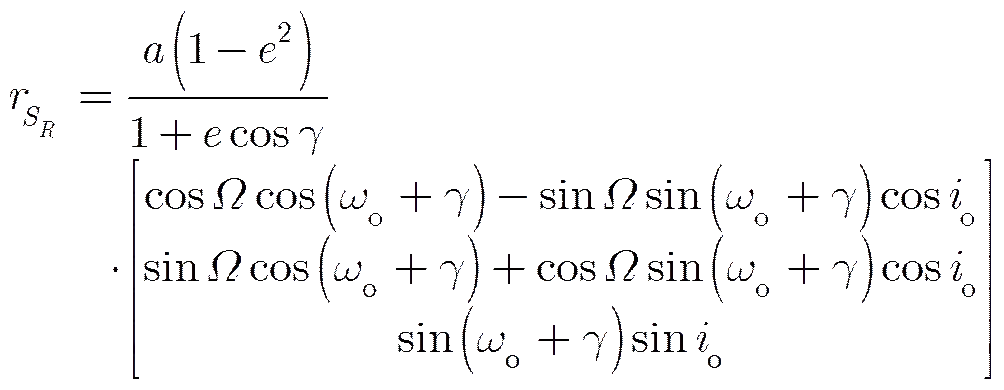
图2 合成孔径成像的几何关系

图3 赤道惯性坐标系(I, J, K)
在赤道惯性坐标系中,理想的地球同步轨道的偏心率e=0,应用球面三角关系可得升交点赤经=0情况下卫星的位置矢量为
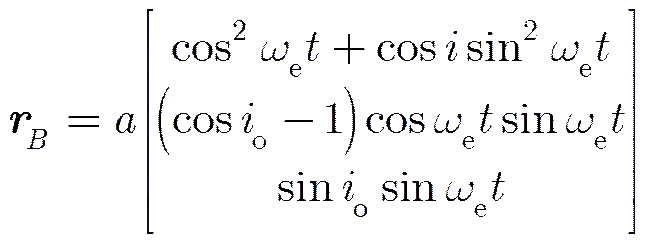
则卫星的速度为:
(3)
由式(3)可知,矢量只有南-北方向分量不为零,其余分量则非常小,可近似为零。图4是根据式(3)得出的卫星在24小时内的矢量的南-北分量的变化情况,近似于余弦变化规律,卫星的速度主要是取决于南-北徘徊速度分量,速度大小在±0.004 m/s~±3.7 m/s范围内变化。这说明,我们可以将卫星看着是在地面36000 km高度上南北飞行的、以“驻留和行走”方式工作的双站合成孔径雷达的接收器,它接收北斗卫星发送的已知的伪随机序列信号。因卫星速度接近零时的多普勒频移很小,对合成孔径成像的贡献不大,此时可专门用于传输回波数据到地面接收站。从图4可见,取卫星平均速度v=2.5 m/s为合成孔径成像速度,对72 km范围的区域成像,则所需要的的成像观测时间约为=8 h。
3 成像原理
合成孔径雷达的成像主要是基于不同距离的散射体会产生特征的互相关峰,在观测时间间隔D内测量两个信号(和)(回波信号和参考信号)的时变互相关并以通常的相关chirp响应方式存储起来,若是对某一特定区域成像,则可应用聚焦技术的聚束模式,便可形成合成孔径雷达图像。合成孔径雷达(SAR)成像技术主要包括数据获取和图像聚焦两个步骤,数据获取可由数据采集系统完成,聚焦(技术)处理可分为斜距向聚焦和方位向聚焦。北斗卫星播发的信号类似于GPS, Galileo等其他全球导航卫星系统(GNSS)信号,都是将采样某种编码方式(BOC, GC等)编码的导航电文码以调相方式调制到载波信号(L波段)上,并采用伪随机码扩频技术来提高定位测距精度,如图5所示。虽然信号形式不同于常规线性调频信号,但都可以通过匹配滤波实现距离压缩。即将接收信号和卫星直接发送的参考信号互相关来获取相关峰值。而方位压缩则与常规SAR算法基本无异。下面具体讨论。
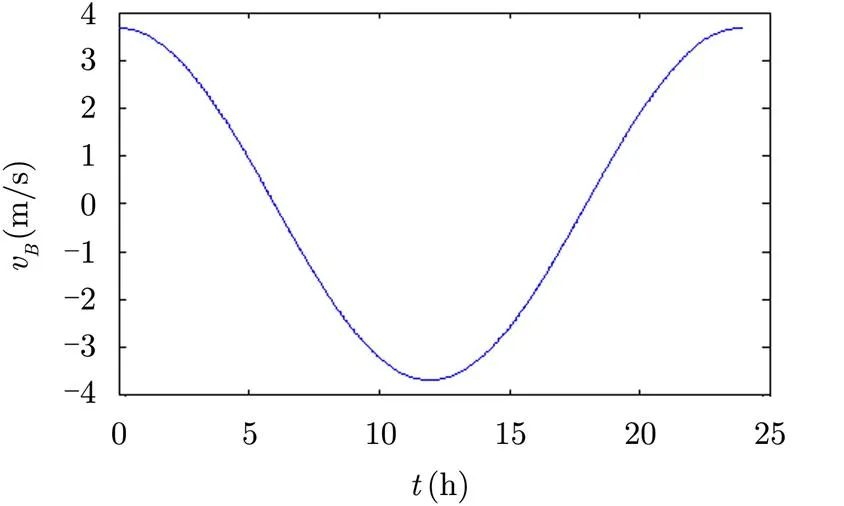
图4 在0~24小时的变化情况
3.1 斜距向聚焦
斜距聚焦是通过将后向散射信号与发射信号互相关而得到,也就是通常意义上的匹配滤波,互相关窗口时间长度就是“驻留时间”长度,等价的脉冲重复频率为1/。既取决于成像面积的斜距刈幅也取决于成像面积的方位向的宽度,设卫星所观测的是由所照射面积内直径为的一个圆,为了能够从直径为的面积中收集回波,窗口的持续时间应该比斜距刈幅的持续时间长许多,即:

在式(4)中,假设是对中国及其周边地区成像,接收器的入射角=35,=1500 km,是光速。另一方面,的上限取决于所成像面积方位向的刈幅宽度。图2中,是沿着航迹方向的地面散射体的坐标,(,)是斜距,设某一时刻一个稳定的点散射体的反射率为r,因为观测时间相对于成像时间很短,可进一步假设接收卫星在观测时间内并不移动,则所发射的基带信号()和所接收的经过正交解调后的基带信号(,)之间存在下列关系:
(5)
图5 北斗卫星信号示意图
式(5)中,是系统的增益常数,是波长,指数项是由于载波的相位延迟。是信号所经过的总的路程,即:

式(6)中,是信号从发射机到目标的距离,是散射信号所经过的距离,是从到地面站的距离。根据图2,则有:
(7)

对于条带成像的合成孔径雷达而言,必须考虑“距离移动”(延迟)和“多普勒历史”(相位)项,如果将接收信号与发射信号进行互相关,就可以得到一个在滞后时间处显示一个峰的距离压缩信号,且的振幅与反射率成正比,其相位为
(r)是地面散射体对信号的附加相位。若设计信号带宽=16 MHz。根据斜距向分辨率和信号带宽的关系有。当然,在实际应用中还要考虑距离压缩过程中加权函数所引起的波形展宽系数以及处理电路不理想性所引起的波形展宽系数。所以可以得到最终的地距分辨率。其中是雷达波束在目标处的入射角。
3.2 方位向聚焦
由于北斗卫星发送的是脉冲占空比为100%的连续脉冲信号,为了仍然能够利用“驻留和行走”的假设,将距离和方位向分开处理,同时也为了避免发生距离模糊,要求斜距对应的回波时延应远小于方位向采样周期,即信号覆盖区域的前后沿雷达回波必须位于一个采样周期内,如前式(4)所述。另一方面,SAR系统又是以脉冲重复频率(PRF)对方位向多普勒频谱进行采样的,为了避免频谱折叠造成方位模糊,根据奈奎斯特采样定理,方位向采样频率PRF()应大于方位向多普勒带宽,即有:。其中是合成孔径方位向分辨率,是真实孔径长度,是理论上可以获得的最大合成孔径,也即照射到地面的波束宽度。因为卫星是相对目标静止的,所以多普勒是单程的,区别于一般SAR的分辨率。综上所述,对波长为(中心频率=2.49175 GHz, L波段)的信号而言,天线从距离36000 km处照射到地面的波束宽度为=1500 km,则有:

(10)
若F=180 km,则得到=9.6 s。由于接收卫星运动的限制(=60 km),这样以标称方位分辨率对一个刈幅宽度只有=120 km进行成像,成像的刈幅是斜视南北向。维持F=180 km是为了避免在方位向聚焦时处理太大的距离移动项。
3.3 目标场重构

(12)

式(13)中:
(14)
式(14)是Fourier变换形式,如果在其两边乘以波束操控因子并从到对进行积分(合理的采样间隔是)就可以得到图像:

式(15)是成像基础。
3.4 稳定目标脉冲响应和杂波信号
被带宽为16 MHz(即去相关时间=62.5 ns)的北斗卫星的信号照射时间的一个地面上的独立散射体,其散射信号被给定位置处的卫星所接收,再通过互相关运算形成聚焦信号,互相关总的延迟时间是,在信号传播时间加上存在一个恒定功率的随机噪声基底,则形成的图像是互相关信号在散射体处有一个峰,峰与基底的功率比是。对所有的(为形成一幅图像的观测时间),在方位位置重复进行,最后,通过将再次赋予相位的距离压缩数据相加而获得散射体的聚焦合成孔径雷达图像。距离相关的峰值信号的和是相干的,而噪声基底信号的和是非相干的。因此,所产生图像是:在整个图像上,2维常数基底信号上,在散射体的位置处有一个峰。在整个图像中一个散射体的峰值信号与基底信号的功率比是:

式(16)中,取有用的观测时间=8.0 h而不取12 h是为了丢弃卫星速度接近零时的合成天线的边缘效应。相关时间比小的不同散射体可以考虑为完全不相干的散射体,这类独立散射体的脉冲响不显示出任何峰。
3.5 部分相干目标的脉冲响应与杂波信号

3.6 信噪比
假设在整个成像面上分布着具有相同的散射体,并进一步假设,和分别是相干、完全不相干和部分相干散射体的百分比,从前面的讨论中,我们将下列3种不同类型的噪声加到来自稳定的散射体的信号中。
(1) 一个恒定的来自所有稳定的散射体2维噪声基底。成像系统的独立稳定散射体的数目是。由式(16)并应用叠加原理,信号与噪声的功率比是:

(2) 一个恒定的来自所有时变散射体的2维噪声基底功率。成像系统的独立时变散射体的数目是。由式(17)并应用叠加原理得出信号与噪声的功率比是:
(19)
(3) 一个恒定的来自方位向的部分相干目标的1维噪声基底信号功率。处于相同斜距位置的这一类的所有独立散射体的噪声的非相干相加,即方位向的1维基底信号非相干相加,由式(18)我们得到信噪比为

综合式(18), 式(19), 式(20),总的信号噪声功率比有如下的表达式:
(21)
4 接收功率
据初步估算,要使同步卫星接收机能够接收到地表反射的静止轨道卫星信号,所需的静止轨道北斗卫星发射机的有效照射功率为57 dB,带宽为=16.0 MHz(对应着地面的功率约为=-170 dB/m/Hz),发射机的波束中心在零纬度,中心频率是=2.49175 GHz,且=-16 dB,卫星接收到的功率为
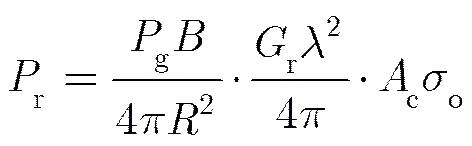
式(22)中,是接收机的带宽,是接收天线的增益,是目标面积(地面分辨率像素,在航迹方向是,在垂直于航迹的斜距方向是,分别取决于合成天线孔径和系统带宽的倒数),则接收机处的功率(假设与在经度上分开30)为
(23)
式(23)中,是接收天线面积。应当注意到:如果接收机的带宽,所接收的功率与地面距离分辨率无关,否则,所选择的地距分辨率m。在带宽中的信噪比SNR取决于天线的噪声温度=290 K、接收机的噪声系数=7 dB(即:系统的温度近似=1500 k)和Boltzman常数:
将所接收的信号和噪声对平均,我们得到一个等价的1/的噪声带宽
(25)
式(25)中的可以表示合成天线的长度除以恒定的接收机速度:

信噪比SNR增益应归于散射信号的长的积分时间、与原始信号的互相关后重新赋予的相位以及由于距离的变化引起的补偿相位。天线的另一边长度由所观测的成像带宽度=1500 km得:
(27)
则天线面积为=6.253.321 m。将式(23)和式(26)代入到式(25)得到:

应用前面所给数据有:
(29)
前面的成像时间、成像分辨率等参数的探究是基于同步轨道卫星的轨道倾角约为0.06794的情况下开展的,由以上论述,若对72 km范围的区域图像进行成像,则所需要的成像时间约为=8 h。可见,除去卫星相对速度接近零时的那段时间,每天可以产生两幅感兴趣面积的稳定散射体的合成孔径雷达图像。实际上还可以根据需求,将被观测的地面扩展到中国及其周边地区以外的区域,这样就势必要适当增加卫星的轨道倾角,从而会导致卫星的运动速度显著增大,多普勒效应更显著,缩短成像时间,这样,每天可以产生多于两幅的遥感图像。
5 一些可能的应用展望
由于地球同步轨道的周期恰好是一个恒星日,它可以每隔24 h重复观测特定地区的地表,可以以几小时的时间分辨率提供观测面积的合成孔径干涉图像,这些图像对于研究地球表面特征的短暂现象是非常有用的;另外,虽然由一颗同步轨道卫星构成的合成孔径雷达系统只能够观测地球表面的三分之一,但却可以通过选择同步卫星的经度来按照人们的需求对特定面积的地表进行观测,这些特点以及由上述推导得出的分辨率特征,使得该系统可以灵活地应用在土壤湿度探测、地表演化的时空动力学特征研究、大气特性研究等方面。
5.1 土壤湿度准确探测
土壤湿度是农作物和天然植被生长状态评估的一个重要参量,但通常的对地观测方法难以准确测量,应用合成孔径干涉图像的强度和相位信息可以高精度地提取土壤的湿度信息,因本文所述系统可以每天重访一次地球,可以从接收的散射信号中提取大于55%的有用信息,而基于低地球轨道卫星的合成孔径雷达则需每隔几天甚至几周才能重访地球一次,最多只能从接收的散射信号中提取22%的有用信息,这是因为土壤湿度的时间依赖性很强,随着季节、地理环境的变化显著,这一点很重要,通过土壤湿度的实时测量可以及时准确地评估农作物生长态势以及植被的生长和变化情况。
5.2 地表面形变化的时空动力学特征研究
目前用来研究地表面形变化和位移的干涉测量技术是基于低轨道卫星的合成孔径雷达干涉图像,但这种方法受时间基线的限制,约需几周才能成像,这样对于研究象火山和地震活动过程中的时空动力学特征显然是不够的,而基于同步轨道卫星的合成孔径雷达可以每天提供所观测地区的干涉图像,提供的地形变化和位移的信息要丰富得多,为地震和火山爆发预报提供更准确的信息。
5.3 大气监测
除了上述所述的一些应用外,其他如海面监测、潮汐涨落等都可以有重要的应用。另外,如果利用机载SAR代替本文系统中的卫星,则可构成星-表双基SAR (Space-Surface Bistatic SAR, SS-BSAR)系统,具有更大的灵活性,同时,由于飞机低空飞行,降低了对发射机功率的要求,有助于提高信噪比,而且飞机本身不需要发射信号,有利于电子静默和隐身突袭,具有很高的军事应用价值。
6 结论
本文提出了一种依托于中国北斗卫星系统的合成孔径雷达成像方法,并从聚焦成像原理、稳定目标的脉冲响应、系统的信噪比和接收功率等方面阐述了系统建立的可行性。研究表明,这种系统只有目标的稳定持续时间达到8个小时的时间里能够成像,主要的应用领域在火山活动、地震等极为重要的自然灾害的及时监测。凡是在几毫秒时间里移动的物体几乎都不能成像。如果适当降低空间分辨率,成像时间可以缩短到小于半天,这会导致另外的一些感兴趣的应用领域(如大气监测等)。如果利用机载SAR代替本文系统中的卫星,则可构成星-表双基SAR系统,也具有非常广泛的应用价值。
本文所述成像方法也可以应用于其他的地球静止轨道的卫星,如定点于东经98,工作于C波段的中国东方红三号(DFH-3)通信卫星。借助于现有的静止轨道的广播、通信卫星构造合成孔径对地成像观测是当前及未来国际上的一个研究热点。
最后需要特别指出的是:本文提出的地球同步轨道合成孔径雷达与当前正在研究的同步轨道合成孔径雷达有本质的不同,前者是双站SAR系统,是对已有静止轨道卫星信号的再利用,且轨道倾角小,飞行速度慢,分辨率较低;后者是单站SAR系统,飞行速度快,分辨率较高。
[1] Elliott D. Kaplan and Christopher J. Hegarty. Understanding GPS-Principles and Applications[M]. Second Edition,Artech House, 2006, Ch. 11.
[2] Tan Shu-sen, Zhou Bing, Guo Sheng-tao,.. Studies of compass navigation signals design[J].&, 2010, 40: 514-519.
[3] 中国卫星导航系统管理办公室. “北斗”卫星导航系统发展报告[R]. 国际太空, 2012, 4. China Satellite Navigation Systems Management Office. Compass Navigation Satellite System development report [R]. Space International, 2012, 4.
[4] John C. Curlander and Robert N. Mcdonough. Synthetic Aperture Radar: Systems and Signal Processing[M]. New York, John Wiley & Sons, 1991, Ch. 1.
[5] Ye Ji-hai, Jiang Yue-song, Zhao Ji-zhi,.. Study of SAR imaging with COMPASS signal[J].,,&, 2011, 54(6): 1051-1058.
[6] 江月松, 王海洋, 等. 地球静止轨道光综合孔径相机的能耗与(u, v)覆盖研究[J]. 光学学报, 2009, 29(1): 12-20.
Jiang Yue-song, Wang Hai-yang,.. Studies on energy expending and (u, v) coverage for optical synthetic aperture camera on geosynchronous orbit[J]., 2009, 29(1): 12-20.
[7] Dennis Roddy. Satellite Communication[M]. New York: McGraw-Hill, 2001, Ch. 1-3.
[8] Laurence G. Taff. Computational Spherical Astronomy[M]. New York: John Wiley & Sons, 1981.
[9] Ian G. Cumming and Frank H. Wong. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M]. Artech House, 2005.
[10] Cutrona L J. Synthetic Aperture Radar[M]. New York: McGraw-Hill, 1990, Ch. 21.
[11] Lu Z and Meyer D J. Study of high SAR backscattering caused by an increase of soil moisture over a sparsely vegetated area: implications for characteristics of backscattering[J]., 2002, 23(6): 1063-1074.
[12] Muldavin E. Sevilleta LTER Fertilizer NPP Study Dataset, Albuquerque, NM[DB].Sevilleta Long Term Ecological Research Site Database, 2004.
[13] Poulin D. Passive detection using digital broadcasters (DAB, DVB) with COFDM modulation[J]., 2005, 152(3): 143-152.
[14] Howland P E, Maksimiuk D, and Reitsma G. FM radio based bistatic radar[J]., 2005, 152(3): 107-115.
[15] Kiyo Tomiyasu and Jean L. Pacell. Synthetic aperture radar imaging from an inclined geosynchronous orbit [J]., 1983, 21(3): 324-329.
[16] Holt B and Hilland J. Rapid-repeat SAR imaging of the ocean surface: are daily observation possible? [J]., 2000, 21(1): 162-169.
[17] He X, Cherniakov M, and Zeng T. Signal detectability in SS-BSAR with GNSS non-cooperative transmitters [J]., 2005, 152(3): 124-132.
[18] Saini R. Problem of signal synchronisation in space-surface bistatic synthetic aperture radar based on global navigation satellite emissions-experimental results [J]., 2010, 4(1): 110-125.
[19] Usman M and Armitage D W. A remote imaging system based on reflected GPS signals[C]. International Conference on Advances in Space Technologies, Islamabad, Pakistan, 2006: 173-178.
A Synthetic Aperture System Based on Backscattering Signals of Compass Navigation Satellite: Concept and Feasibility
Wang Hai-yang Jiang Yue-song
(School of Electronics and Information Engineering, Beihang Univeisity, Beijing 100191, China)
A concept of a bi-static geosynchronous synthetic aperture system, which is formed by reusing backscattered signals of Compass Navigation Satellite System (CNSS), is proposed. The geometric relations of a geostationary satellite of CNSS, located on a geosynchronous satellite receiver, which is illuminated by the backscattered energy of a satellite of CNSS, and a ground station is built up, and following the relations as well as principle of synthetic aperture radar, we expatiate the feasibility of the system by considering parameters such as imaging resolution, ratio of signal to noise and link budget,.. Besides, the potential remote sensing applications for measurement of terrain humidity, characteristics of space-time dynamics of changing of terrain surface and atmospheric characteristic,..
Compass Navigation Satellite System (CNSS); Bi-static; Imaging of synthetic aperture; Observation of earth
TP79
A
2095-283X(2012)02-0209-08
10.3724/SP.J.1300.2012.20041
2012-05-24收到,2012-06-12改回;2012-06-18网络优先出版
国家高技术研究发展计划(863计划)(2011AA*****9B8)资助课题
王海洋 wang_wsm@163.com
王海洋(1986-),男,在读博士,研究方向为压缩感知和综合孔径成像等。
江月松(1959-),男,教授,博士生导师,研究方向为被动综合孔径成像和微波光子学等方面的研究。
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
电讯技术(2022年1期)2022-02-12 05:16:12
潍坊学院学报(2021年2期)2021-07-22 07:59:24
无损检测(2019年11期)2019-11-20 07:07:50
当代陕西(2019年18期)2019-10-17 01:48:50
电脑知识与技术(2019年13期)2019-07-08 02:23:41
石油地球物理勘探(2017年2期)2017-11-23 06:01:26
城市勘测(2016年2期)2016-08-16 05:58:24
太空探索(2016年3期)2016-07-12 09:58:47
