极低车速下三轴转向车辆机动性的分析与验证
2012-07-23 00:35巩建坡王树凤贺翠华
山东理工大学学报(自然科学版) 2012年2期
巩建坡,王树凤,贺翠华
(山东理工大学交通与车辆工程学院,山东淄博255091)
目前的重型汽车大多都是前轮转向,在低速转向行驶时,前后轮运动轨迹不协调,转向响应慢,转弯半径急剧增加,机动性恶化导致轮胎磨损非常严重;多轴转向技术由于后轴或全轴都参与转向,在低速时前后轮逆相位转向使转弯半径减小,机动性增强,较高速时前后轮同相位转向,减小甩尾、侧滑的危险,提高了车辆的操纵稳定性,因此多轴转向技术是目前解决上述问题的有效手段[1].
国外已经出现较高技术水平的多轴车辆,但由于多轴车辆与军工相关的特殊性,国外一般都进行技术封锁.国内的多轴转向技术水平还比较低,合理的控制策略是研究的关键点.目前,主要的控制策略有零质心侧偏角、最优控制、横摆率跟踪、模糊控制等控制方式,在研究多轴车低速下机动性时往往忽视极低车速下的大转角转向这一特殊状况,没有对其进行深入的研究.重型车辆更看重在较小空间转向时机动灵活性,因此对极低车速下大转角转向的研究势在必行.本文针对这一问题,以三轴车为研究对象对极低速大转角转向进行研究,提出以最小转弯半径为控制目标的控制策略,与零质心侧偏角控制策略[2]进行比较,并做出三轴转向的模型车进行了实验验证.
1 理论分析
1.1 模型及方程
汽车车厢只有平行于地面的平面运动,并且沿x轴的速度u保持不变。因此汽车就只有沿y轴的侧向运动与绕z轴的横摆运动这样两个自由度,汽车的侧向加速度限定在0.4g以下,此时轮胎侧偏特性处于线性范围.假设模型分析中所用到的角度均按照小角度计算,不考虑车轮纵向力对轮胎侧偏特性的影响,忽略空气动力的作用并将其简化成线性二自由度模型[3-5].线性二自由度简化模型如图1所示.

图1 三轴多轮转向车辆二自由度模型
其中:β为车辆质心侧偏角;Wr为横摆角速度;k1、k2、k3为前轴、中轴及后轴侧偏刚度(为轴上两轮侧偏刚度之和,取负值);δ1、δ2、δ3为前轮、中轮及后轮转向角;α1、α2、α3为前、中及后轴侧偏角;a、b、c为前、中、后轴到质心距离;Fy1、Fy2、Fy3为地面对前中后轮侧偏力.
根据Y轴上的力的平衡公式和绕质心力矩的平衡公式,简化后得到三轴车的运动微分方程如下
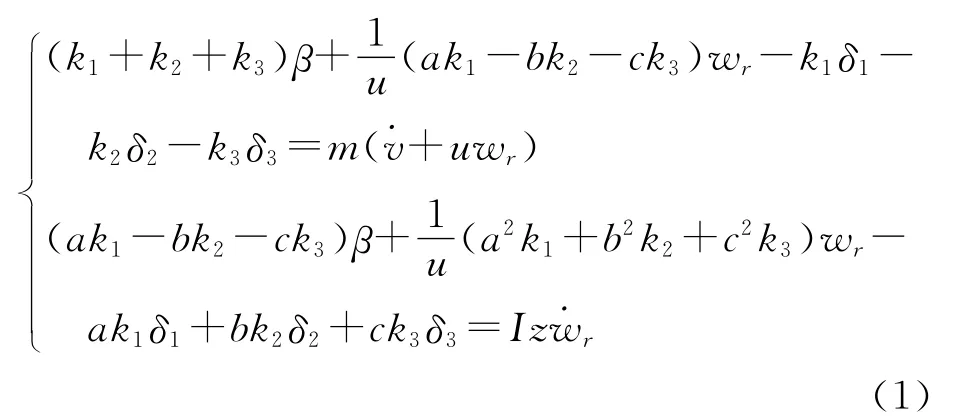
将三轴车的运动微分方程用标准状态空间方程的形式表示.取状态向量为X=[β,输入向量为U=[δ1δ2,输出向量为Y,将微分方程(1)经过转变写成矩阵的形式如下:
由以上转化后的表达式可求出三轴汽车在极低速大转角时以零质心侧偏角和最小转弯半径两种控制方法下前轮角阶跃输入下的瞬态响应.
由上可知,当知道了三个轴的转角时,三轴车的运行情况也就一目了然,要想控制其运行情况就需要控制三个轴的转动角度.因此在低速转向时如何控制各轴转角的关系是关键,控制策略的好坏通过改变各轴之间的转角关系,从三轴车的运动性能的变化上体现出来的.
1.2 控制策略
1.2.1 最小转弯半径
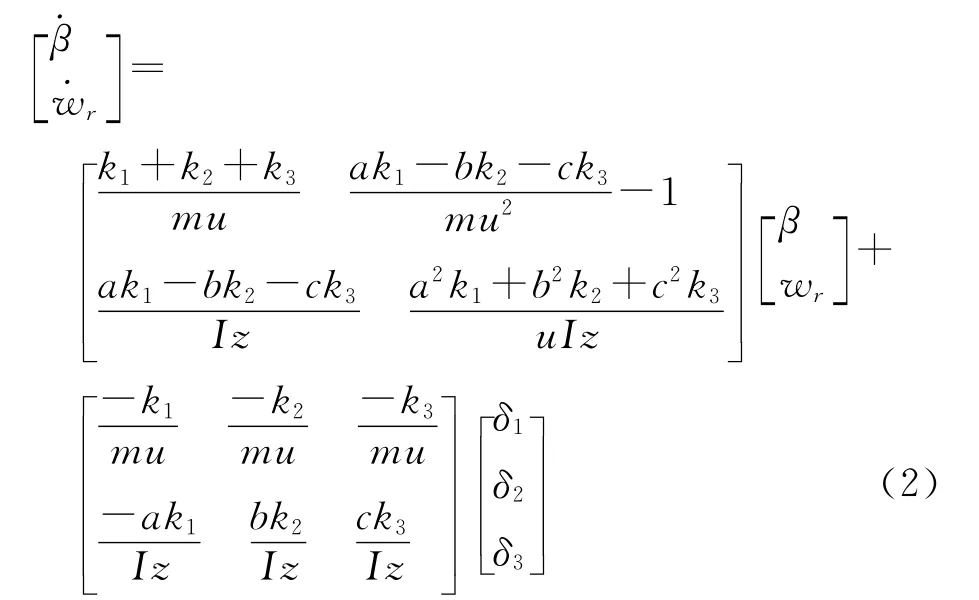
大转角转向一般在极低的速度下进行,对重型车来说在相对狭窄的空间内转向时更看重的是车辆的机动灵活性.即保证车辆在正常行驶的情况下车辆转弯半径最小.因此最小转弯半径的控制策略在极低速大转角转向时十分重要.简化的结构模型如图2所示.
图2 汽车全轮转向简化模型
最小转弯半径是指转向中心O到外轮偏转角达到最大值时与地面接触点的位置距离[6].当多轴转向时转弯半径为各转向轴转弯半径的最大值,即R=max[R1,R2,R3] .
如图2所示,当R1=R3时转弯半径最小
由几何关系可知δ1和δ2的关系,

所以有中、后轮与前轮的转角比例关系
因为在建立模型时各轴转角都取的正值,而在极低速转向时前后轮转动方向相反,为了便于区分转向方向将比例关系加上一个负号.
1.2.2 零质心侧偏角
零质心侧偏角的控制策略的控制目标是整车质心侧偏角为零,采用前后轮成比例关系以及阿克曼定理来确定后面两轴与前轴转角的比例关系[2].
2 实验车辆的仿真与实验
2.1 实验车辆的制作
本实验所用的模型车是在飞思卡尔智能车模的基础上改装的三轴转向车辆.主要由机械部分、电路部分、控制组成.车辆模型如图3所示.

图3 制作的实验模型车
2.1.1 机械部分
三个转向轴均采用原车模前轴的机械结构,可根据实际需要调节车轮的定位.采用硬质有机玻璃代替原先的塑料底盘来连接各轴,在上面固定电机、伺服电机、减速器等机构.应用模型车原有的减速器、传动轴、差速器将电机的输出转变成车轮的转动,其中模型车的中间轴为驱动轴.
2.1.2 部件的选择及应用
采用高性能增强型1T单片机STC12C5410AD作为主控芯片,它含有4路PWM用来控制伺服电机和驱动电机.本实验采用MP3遥控器和一体化接收头HX1838来遥控车辆,采用直流电机RS380-ST来驱动电机带动小车的行驶,电机的驱动用BTS7960来搭建电机驱动电路.用OME-NФ18光电编码器来作为车速传感器以便完成对车速的闭环控制,采用S3010伺服电机来带动转向机构完成转向.采用7.2V充电电池为整个系统供电,通过设计电源转换电路来为单片机、直流电机以及伺服电机供电.
2.1.3 控制部分
三轴车前轴的转向、速度、转向模式、转角都是由遥控按键来控制.为了保证模型车辆的速度不受外界其它因素的影响,电机的控制采用PID控制策略.单片机根据前轴的转角以及采集到的数据,运用零质心侧偏角和最小转弯半径的控制策略计算出后两轮的转角值,通过产生PWM脉冲信号控制后两轴的伺服电机带动转向机构完成转向,从而实现多轴转向.结构框图如图4所示.
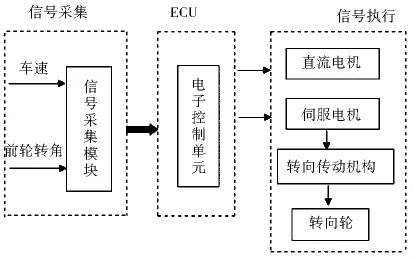
图4 控制部分模型框图
2.2 操纵稳定性仿真分析
以制作的三轴模型车汽车为运动仿真对象,其结构参数见表1.

表1 车辆动力学参数
在这里采δ1=24°,u=0.4m/s时进行转向的分析,应用Matlab软件对比例前馈控制的三轴汽车转向时以零质心侧偏角为控制目标的全轮转向和以最小转弯半径为控制目标的横摆角速度、质心侧偏角的时域响应特性.
极低速大转角转向时仿真输出的横摆角速度与质心侧偏角阶跃响应特性曲线如图5所示.
图5中的Rmin和Omin分别指在最小转弯半径和零质心侧偏角控制策略。从图5(a)图可以发现,低速下三轴汽车以最小转弯半径为控制目标时车辆的稳态横摆角速度比以零质心侧偏角为控制目标的横摆角速度高,这表明低速以最小转弯半径为控制目标三轴汽车转弯半径小,更容易转向,即低速机动性好;在同一车速下,两种控制目标的汽车横摆角速度达到各自稳态值的时间基本相同.从图5(b)可以看出三轴汽车以最小转弯半径为控制目标时质心侧偏角的稳态值不等于零,但值非常接近零,说明以最小转弯半径为控制目标时车辆转弯稳定性比较好,可以采用.
2.3 实车实验
根据零质心侧偏角和最小转弯半径的控制策略分别编写单片机控制程序使模型车以0.4m/s的速度、前轮转角大约24°行驶,按照小车的行驶路线画出其轨迹,通过比较轨迹即可验证理论的准确与否.实验验证如图6所示.
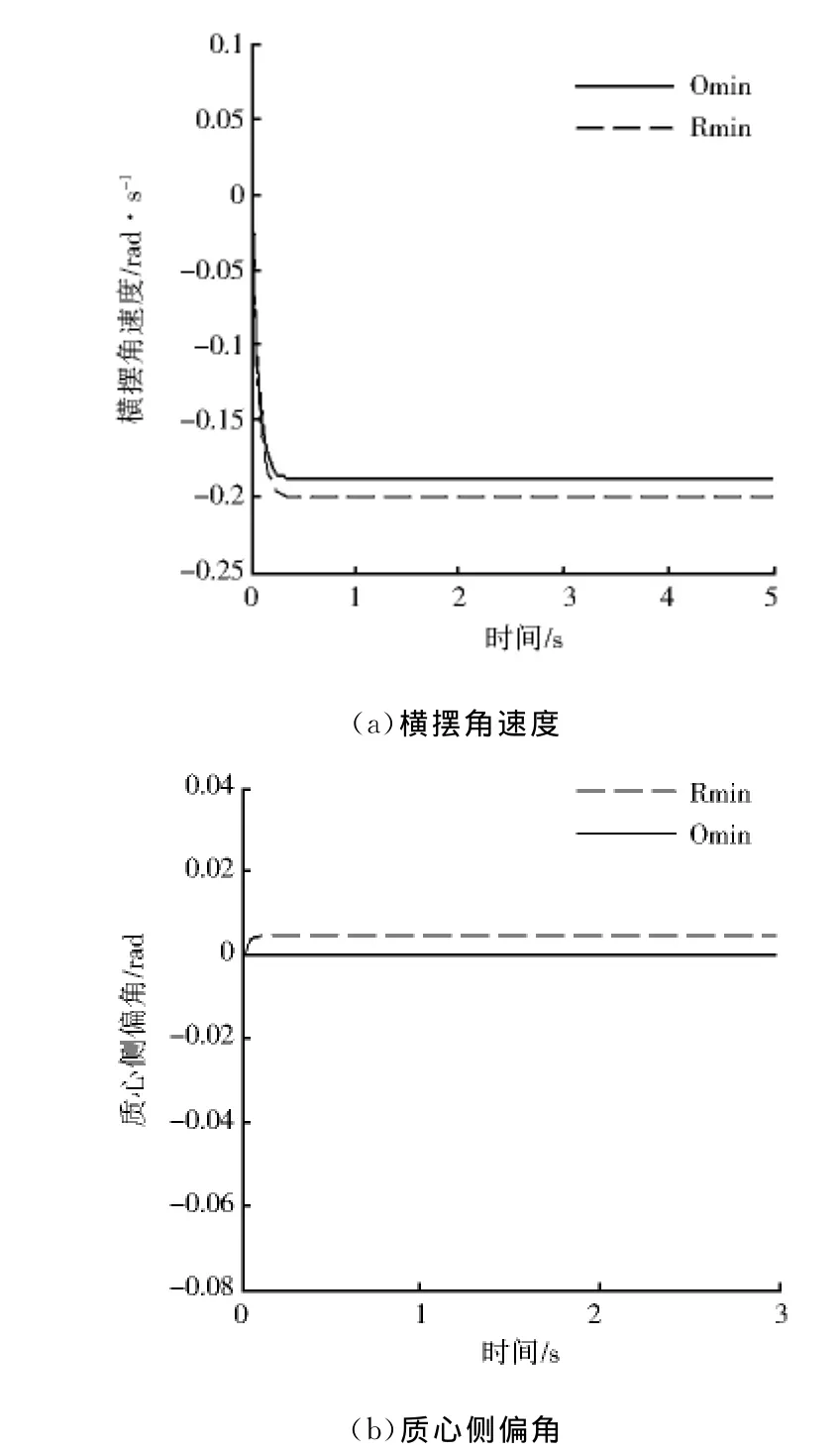
图5 三轴车在两种不同控制方法下的横摆角速度与质心侧偏角阶跃响应

图6 模型车转向轨迹图
图6中轨迹线由上到下依次是单前轴转向、零质心侧偏角控制下全轴转向和最小转弯半径控制策略下的全轴转向的运动轨迹.为了便于数字比较测量转弯半径,比较结果见表2.
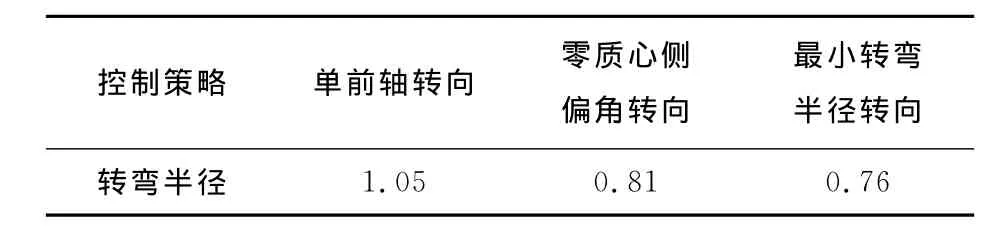
表2 转弯半径比较m
由表2可知,在相同的前轴转角和速度下最小转弯半径的控制策略比零质心侧偏角的控制策略的转向半径更小,也更灵活.同样实验验证其他速度和转角设置都是最小转弯半径的策略下转弯半径最小,所以可验证本文理论研究的正确性.
3 结束语
本文对低速下三轴汽车全轮转向的机动性进行了研究.建立了三轴车的二自由度模型,推导了二自由度模型的运动微分方程;就极低速大转角转向这一特殊工况提出了最小转弯半径为目标的控制策略,仿真分析与实车实验验证结果表明,三轴全轮转向车在极低速大转角下采用最小转弯半径为控制目标具有很好的机动性.
[1] 高秀华,张春秋,李炎亮,等.多轴转向系统转向控制模式综述[J] ,起重运输机械,2006(6):5-8.
[2] 张春秋,高秀华,杨旭,等.三轴车辆全轮转向操纵稳定性仿真分析[J] ,农业装备与车辆工程,2007(9):9-12.
[3] Guan X Q,Zhang J W,Qu Q Z.Design of model following variable structure controller for three-axle vehicle[J] .Journal of Donghua University(English),2003(1):100-104.
[4] 喻凡,林逸.汽车系统动力学[M] .北京:机械工业出版社,2000:211-300.
[5] 王树凤,张俊友,李华师,等.不同转向模式的多轴转向车辆的性能分析[J] .公路交通科技.2008,25(12):184-187.
[6] 陈家瑞,汽车构造[M] .北京:人民交通出版社,2005:269-271.
猜你喜欢
农业装备与车辆工程(2022年8期)2022-10-31
民用飞机设计与研究(2020年4期)2021-01-21
专用汽车(2020年9期)2020-09-26
新课程·中学(2019年7期)2019-09-17
山东冶金(2019年2期)2019-05-11
家庭科学·新健康(2018年10期)2018-12-15
锻造与冲压(2018年7期)2018-05-29
物理教学探讨(2018年1期)2018-02-13
黑龙江科学(2015年14期)2015-03-27
车辆与动力技术(2012年1期)2012-08-21