
基于MATLAB的光伏MPPT仿真研究
2012-07-23 00:35张红光宋吉江翟义成刘圆圆
山东理工大学学报(自然科学版) 2012年1期
张红光,宋吉江,翟义成,陈 洁,刘圆圆
(山东理工大学电子与电气工程学院,山东淄博255091)
光伏阵列最大功率跟踪(maximum power point tracking,MPPT)控制是光伏系统的重要组成部分,其目的是使光伏阵列始终输出最大的功率.只有功率最大输出才能够充分地利用太阳能,减少损耗.目前太阳能电池直接获得的能量不稳定,即电压电流随着光照和温度是可变的.为了解决这一问题,加入了DC/DC功率转换模块,使得输出的电压基本稳定,能量得到最大利用.本文采用优化的MPPT算法,并通过模拟仿真的方式来验证该算法是否可行.
1 光伏电池特性分析
1.1 光伏电池数学模型
根据图1所示的光伏电池的等效电路,可以得到光伏电池的输出特性表达式[1-2]:
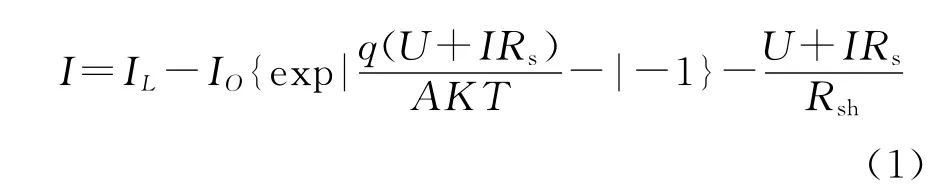
式中:IO表示二极管反向饱和电流;q表示电子荷;K表示波尔兹曼常数;T表示绝对温度;A表示二极管因子;U表示光伏电池输出电压;I表示光伏电池输出电流;Rs表示电池内阻;Rsh表示二极管反向饱和漏电流.
式(1)中的各项参数与电池的温度和光照有关,而且也很难确定,且在工程应用中不常使用.通常情况下,依据电池的特性参数简化物理模型,得到工程数学模型[3]


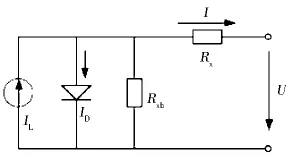
图1 光伏电池等效电路图

根据(2)—(4)式,利用MATLAB/simulink模块建立光伏电池的仿真模型.如图2所示.
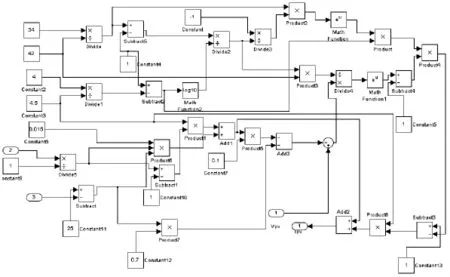
图2 光伏电池模型
1.2 输出特性分析
不同温度下的输出特性曲线如图3和图4所示
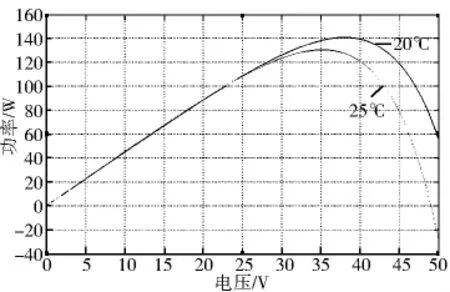
图3 不同温度下的P-V曲线
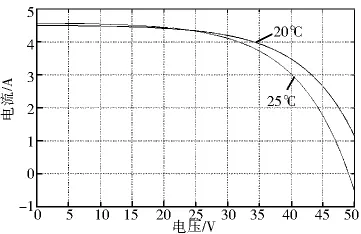
图4 不同温度下的I-V曲线
随温度变化而改变从仿真曲线可以看出,光强一定时,光伏电池最大功率;输出电流基本上不变;光伏电池功率输出呈非线性,随着输出电压的增大,功率有一个最大值,有必要进行最大功率点的跟踪.
2 MPPT仿真算法分析
光伏整列正常工作时,输出电压以微小值不断波动靠近最大功率点时的电压值,在输出电压变化的同时,检测输出功率变化的方向,从而确定下一次变化方向,确定下一次输出电压参考值的大小.算法流程图如图5所示.
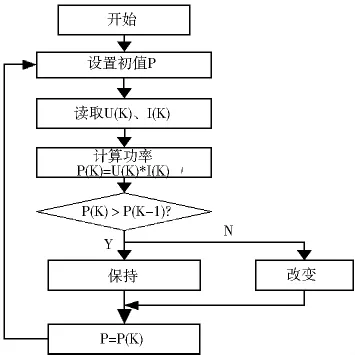
图5 控制算法流程图
Matlab/Simulink中搭建仿真模型如图6所示.扰动步长大小的确定尤为重要,扰动步长太小,到达稳态后精度较好,但跟踪时间长且系统动态性能较差;扰动步长太大,跟踪时间虽缩短,但到达稳态后精度会变差.该算法通过加入滞环来实现扰动,通过改变步长值,并对光伏系统模型进行仿真,最终得出步长取0.01仿真效果最为理想[4].光伏系统输出功率曲线如图7所示.
3 仿真实验
根据以上算法建立的模型,参考电池参数为开路电压42V,短路电流4.5A,峰值电压34V,峰值电流4A[5].在光伏电池后加入功率转换电流DC/DC模块,采集电压电流后控制pwm模块来实现最大功率点跟踪.光照和温度由阶跃信号提供,光照由1kW下降到0.8kW后系统能够快速响应,并稳定在一定值.如图7所示,分别是电压、电流、功率跟踪曲线.
4 结束语
本文采用MATLAB中的simulink模块对光伏电池及MPPT控制模块进行了仿真验证,证明具有可行性.虽然光伏电池模型没有使用S函数编写,精确性有所下降,但是这样的模型方便使用,同时还可以作进一步改进.

图7 功率跟踪曲线
[1] 王立乔,孙孝峰.分布式发电系统中的光伏发电技术[M] .北京:机械工业出版社,2010:25-35.
[2] 王长贵,王斯成.太阳能光伏发电实用技术[M] .第二版.北京:北京化学工业出版社,2009:33-46.
[3] 高厚磊,田佳,杜强,等.能源开发新技术--分布式发电[J] .山东大学学报:工学版,2009,39(5):107-108.
[4] 周德佳,赵争鸣,吴理博,等.基于仿真模型的太阳能光伏电池阵列特性的分析[J] .清华大学学报:自然科学版,2007,47(7):1 109-1 112.
[5] 唐渝,赵莉华.光伏发电的最大功率点跟踪控制[J] .电源世界,2010(6):48-51.
猜你喜欢
今日农业(2022年14期)2022-09-15
军事文摘(2022年14期)2022-08-26
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
科学大众(2021年21期)2022-01-18
小学科学(学生版)(2021年12期)2021-12-31
成都信息工程大学学报(2021年5期)2021-12-30
中学生数理化·八年级物理人教版(2019年6期)2019-06-25
河北科技大学学报(2015年5期)2015-03-11
