
基于不完全微分的模糊PID控制的伺服系统设计
2012-07-23 06:39李鹏飞孙应芳彭跃辉
微特电机 2012年9期
李鹏飞,孙应芳,彭跃辉
(西安工程大学,西安710048)
0引 言
在高性能的伺服控制系统中,伺服驱动器大多采用定位准确的全数字位置控制方式,伺服电机多采用具有转矩密度高、效率高、转矩平稳性好的永磁同步电机。由于永磁同步电动机的非线性及不确定性,其运动控制性能不易提高[1]。而智能控制策略能够减弱对象变化对控制精度的影响[2]。本文将采用基于不完全微分的模糊PID控制算法的位置环控制器。利用模糊PID控制可以实时调节PID参数,克服了传统的靠技术人员经验进行PID参数的调节;利用不完全微分来改善系统的动态性能,提高系统的鲁棒性。在控制过程中,需要用智能控制理论和复杂的控制算法加以控制,DSP采用的Harvard结构、流水线方式和专用硬件乘法器等使其具有数据处理能力强和运行速度高的特点,能够满足控制过程的需求[3]。
1永磁同步电动机矢量控制
假设PMSM磁路不饱和,忽略磁滞、涡流损耗的影响,空间磁场呈正弦分布,在随转子旋转的dq坐标系上,永磁同步电动机的数学模型[4]如下。
永磁同步电机的磁链方程:

式中:φd、φq为 d-q坐标系上的定子磁势分量;φr为永磁磁极对应的转子磁通。
永磁同步电动机的定子电压方程:



由假设知气隙磁场分布均匀,电动机感应电动势成正弦波分布,那么Ld=Lq成立,此时,三相永磁同步伺服电动机的电磁转矩变为:

永磁同步电动机由于转子磁链恒定不变,只要控制使id=0,就能使永磁同步伺服电动机得到线性化解耦控制效果。伺服控制原理框图如图1所示。

图1 伺服控制原理框图
2硬件设计
伺服驱动器的核心作用是按照驱动要求驱动电机。可控的物理量有三个:转矩、速度和位置。传感器把这三个物理量反馈到控制系统,通过控制系统进行运算和输出,实现对这三个量的闭环控制,从而实现对永磁同步电动机的伺服控制。伺服控制硬件结构框图如图2所示。

图2 伺服控制结构硬件框图
该伺服系统是由外部位置指令给定、转子位置传感器、电流传感器、电压源逆变器、三相永磁同步电机以及DSP组成。DSP控制器完成检测信号的A/D转换,完成位置调节器、速度调节器、电流调节器以及逆变器驱动SVPWM信号的计算。
2.1位置信号的处理电路


表1 电机的初始位置估算
(2)当Z脉冲到达时,改用正弦波驱动,此后的位置根据每周期内增加的脉冲个数来计算。
本系统采用MC3486差动接收器实现线路阻抗的匹配,光电隔离器6N137(A、B、Z脉冲)和光电隔离器PC817(U、V、W脉冲)使控制电路和光电脉冲编码器不发生电的联系,避免了高速CPU信号对反馈信号的干扰。图3为其处理电路。

图3 编码器反馈信号处理电路
2.2电流反馈处理电路
由永磁同步电动机输出电磁转矩公式可知,电磁转矩Te与电流iq成正比,而电磁转矩电流iq是有关电机转子电气角位移θ和定子相电流iu、iv、iw的函数。位置反馈值θm和电气角位移θ的关系:

在没有中线时,电动机定子三相电流有如下关系:

可以看出,只需检测两相电流iu、iv就可以确定电机的输出转矩。为检测这两相电流,本文选用霍尔电流传感器。由于霍尔电流传感器输出的是有正负方向的弱电流信号,而A/D转换模块需要输入0~3 V的电压信号,因此,需先将电流信号转换成电压信号,放大、滤波处理后,再由电平偏移电路将其转化到0~3 V的范围内。经处理得到的电压信号经A/D模块转化为数字信号,经过数字滤波和定标处理后,为电流环提供电流反馈信息。处理电路如图4所示。

图4 电流反馈处理电路
3软件设计
3.1软件设计流程图
DSP软件设计是整个控制系统的核心。主要包括:接收来自上位机的指令;采样电机电流及采集磁极位置信号;通过电流、速度调节器产生控制智能功率模块的PWM波形等。图5为伺服系统软件设计流程图。
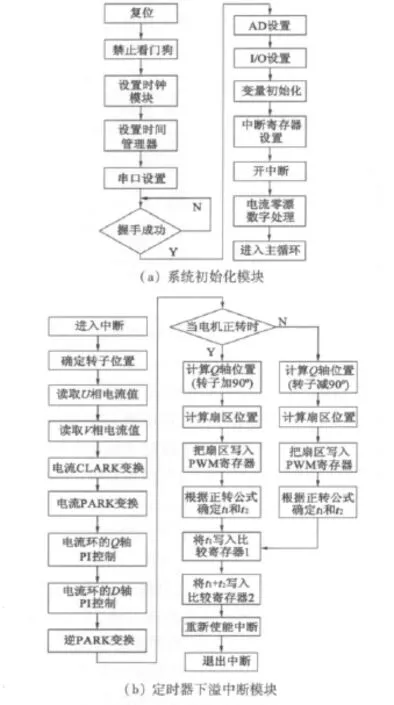
图5 软件设计流程图
图5(a)为系统初始化模块,主要完成对变量和TMS320LF2812的片内外设寄存器进行初始化,同时和上位机进行握手通讯。图5(b)为定时器下溢中断模块,通过定时器下溢中断可以触发电流采样、速度采样。该模块主要通过A/D转换模块采样定子电流反馈信号,该信号是经过电流反馈处理电路得到的电压信号;通过片内正交编码电路采样光电编码器的脉冲信号,将其作为速度环和位置环的反馈信号;通过串行通讯接口接收来自上位机的位置指令,构成位置、速度、电流三闭环控制结构。在该中断内,主要是实现SVPWM信号,它把逆变器与电机看成一体,作为执行机构,着眼于如何产生恒定的圆形磁场(即给电机输入三相正弦电流),从而产生恒定的电磁转矩。
SVPWM信号的产生主要通过以下两部分来实现:
(1)实现力矩电流和励磁电流分量,可按电流矢量算法计算得到(本文采用id=0的矢量控制策略);
(2)实现各个开关电压矢量的作用时间,可由空间矢量模块计算得到,产生六路PWM信号,驱动智能功率模块进行PWM逆变换。
3.2不完全微分的模糊PID算法的实现
本伺服系统采用三环控制,位置环作为外环,决定了电机的快速性及稳态性。为了获得优良的性能,位置环采用基于不完全微分的模糊自适应PID控制算法,速度环和电流环均采用非常成熟的PI控制算法。本文使用的模糊控制模块[6-7]是通过在Simulink中加入MATLAB中的模糊工具箱来实现的。不完全微分的模糊PID控制算法的结构框图如图6所示。

图6 不完全微分结构框图
其中不完全微分结构的传递函数如下:

不完全微分项:
将其离散化,整理得:

则:

不完全微分的ud(k)比全微分多了一项αud(k-1),微分项由kd降到kd(1-α),当输入信号为阶跃信号时,微分输出在第一个采样周期内的脉冲高度下降,此后又按指数规律衰减,具有较理想的控制特性[8]。
模糊控制是通过在Simulink中加入MATLAB中的模糊工具箱实现,具体的步骤分为两部分:
(1)创建一个模糊逻辑(.fis文件)
打开模糊推理系统编辑器:在Command Window中键入fuzzy;使用模糊推理系统编辑器;使用隶属度函数编辑器;使用规则编辑器;保存为fuzzypid.fis。通过 rule viewer可观察 kp、ki、kd随着 e、ec的变化情况。如图9所示。
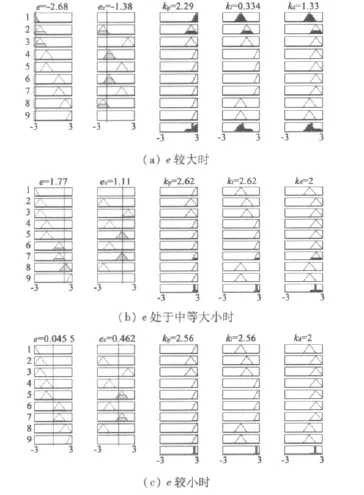
图 7 kp、ki、kd随着 e、ec的变化值
当e较大时,为了加快系统响应,kp取值较大,为了避免微分饱和,kd取值较小,为了防止系统出现较大的超调,使积分饱和,通常取ki=0;当e处于中等大小时,为产生较小的超调,kp取小些,ki、kd的取值要适当;当e较小即接近设定值时,kp、ki的取值增加,以确保系统具有良好的稳定性,为避免系统在设定值附近出现振荡,ec较小时,kd可取值大些,否则可取小些。
(2)将模糊逻辑添加到Simulink中
创建一个Simulink文件(.mdl文件);添加模糊逻辑(在Fuzzy Logic Controller中设计);添加其他模块;保存为 fuzzypid.mdl。
运行时,先在Command Window中键入fuzzypid=readfis('fuzzypid.fis'),然后运行 fuzzypid.mdl。Simulink仿真模型如图8所示。

图8 基于不完全微分的模糊PID控制仿真图
下面分别对 PID、模糊 PID、基于不完全微分PID的算法进行了仿真,仿真结果如图9所示。从图9(a)中可以看出,微分作用引入了高频干扰,破坏了系统的稳定性。由图9(b)知,加入一阶惯性环节后,可以抑制高频干扰,同时系统的响应速度加快,超调减小,稳态性能变好。由图9(c)知,采用基于不完全微分的模糊自适应PID控制,系统的响应速度加快,而且没有超调和振荡。由此证明了该算法的有效性。

图9 三种算法的仿真结果比较
4结 语
本文基于TMS320LF2812对永磁同步电动机进行了软件和硬件的设计,并通Simulink对基于不完全微分的模糊自适应PID算法进行了仿真。验证了该算法的有效性,为系统实现高精度和高可行性打下了基础。
[1] Marco T,Francesco P,Zhang D Q.Real-time gain tuning of PI controllers for high-performance PMSM drives[J].IEEE Trans,on Industry Applications,2002,38(4):1018-1026.
[2] 刘珊梅,马迁,陈贤顺,等.自适应模糊滑模控制在PMSM中的应用[J].微电机,2009,42(5):43-46.
[3] 苏奎峰,吕强,邓志东,等.TMS320X28XXX原理与开发[M].北京:电子工业出版社,2009.
[4] 谢宝昌,任永德.电机的DSP控制技术及其应用[M].北京:北京航空航天大学出版社,2005.
[5] 曾建安,曾岳南,曁绵浩.永磁同步电机转子初始位置检测[J].电机技术,2005(4):44-45.
[6] 王翔,马瑞卿,吉攀攀.基于模糊PI控制的PMSM位置伺服系统仿真[J].微电机,2010,4(3):52-55.
[7] 李木国,李响,刘达.基于DSP的电机伺服系统中的模糊PID控制[J].测控技术,2011,30(6):64-67.
[8] 宋晶.基于不完全微分的单神经元自适应PID控制器研究与应用[D].福建:华侨大学,2006.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
数学物理学报(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
汽车维修技师(2019年7期)2020-01-16
数学物理学报(2019年5期)2019-11-29
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
新高考·高一物理(2014年4期)2014-09-17
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
