新型数字化牙模激光扫描系统
2012-07-19 05:49:24陈新禹聂建辉
哈尔滨工业大学学报 2012年11期
陈新禹,胡 英,马 孜,聂建辉
(大连海事大学自动化研究中心,116026 大连)
新型数字化牙模激光扫描系统
陈新禹,胡 英,马 孜,聂建辉
(大连海事大学自动化研究中心,116026 大连)
为了快速获取牙齿模型的数字型面信息,提出一种基于三轴联动平台的数字化牙模激光扫描系统.该系统基于光机电一体化技术和三维数据处理技术实现了牙齿模型三维型面信息提取和牙齿模型的造型设计.系统由线结构光视觉传感器、三轴联动平台、电气控制系统、主控计算机及上位机软件组成.通过线结构光视觉传感器和三轴联动平台的协调控制实现牙齿模型的无缝数据获取.实验结果表明,该数字化牙模激光扫描系统的测量精度可达0.182mm,速度为8 000点/s.该系统扫描速度快、测量精度较高、操作灵活方便,可以满足牙模三维型面数据采集的要求.
逆向工程;牙模扫描;三轴联动平台;转轴标定
由于CAD/CAM技术趋于成熟以及口腔需求的日益增加,口腔修复体CAD/CAM技术亟待解决.口腔修复装备包括从患者受损牙体的检查,牙齿数据模型的获取,修复体造型的设计,直至患者牙体的修复完成,恢复牙体形态与功能的全部过程[1].其中牙齿数据模型的获取则成为关键点和难点.
目前,国际上已有逾十种口腔CAD/CAM系统问世.其中德国Sirona公司的Cerec 3D齿雕系统[2]是世界范围内最成功的数字化口腔修复CAD/CAM系统,能在一小时左右完成牙齿的扫描、设计、加工和安装等一系列流程.而我国口腔CAD/CAM的研究与应用起步相对较晚,到目前为止还没有成型的产品进入市场.
北京大学口腔学院研制一套口腔CAD/CAM系统[3],采用非接触式三维激光扫描仪获取数据,利用Surfacer软件设计修复体牙冠.但是该系统操作复杂,口腔修复不完善,未达到理想的精度.上海第二医科大学[4],第四军医大学[5]等也开展了相关的研究,已取得了一些成果,但都为形成最终的应用系统.
为了解决我国数字化口腔医学领域的现状,本文提出了一种具有高灵活性、低成本、可满足数字化口腔修复需求的新型扫描系统.首先介绍了该系统的机械结构及其运动学模型,然后简单介绍了系统的软件架构,最后进行了标定实验和精度验证实验以及相关的精度分析.实验表明,该系统扫描速度快、测量精度较高等特点,可以满足牙模三维型面数据采集的要求.
1 系统结构及运动学模型
1.1 系统结构
在牙科医疗中,合格的牙齿修复体不仅需要与牙冠贴合紧密而且还要求其与两侧牙齿进行贴合校对.为了实现上述目标,需要扫描至少3颗牙齿的数据信息.为此,系统载台设计了平移轴、俯仰轴、旋转轴3个运动轴,使得视觉传感器能够从多个角度扫描到牙齿.
本系统中所使用的具体硬件设备如下:
1)摄像头
选择日本WATEC公司的535EX CCD摄像头,它的像素为752(H)×582(V),成像面积4.8mm×3.6mm,水平分辨率为600TVL.镜头选择日本Computar镜头,焦距为24mm,最大光圈为F1.2.
2)图像采集卡
使用的图像采集卡是北京嘉恒中自图像技术有限公司的OK-C30A采集卡.它与上位机是基于PCI总线连接的,能够采集彩色和黑白两种图像.OK-C30A采集卡采用了10位高精度的视频A/D,梳状滤波器,抗混跌滤波等技术.
3)激光器
采用波长为650nm的线式激光器,输出功率5mW,工作电压为3 V.
4)步进电机
步进电机选用北京埃库码科技有限公司的35BYGH0.9°两相步进电机.其步距角精度为±5%可以满足系统的基本要求,而且价格比较低廉.
5)运动控制卡
采用研华PCI-1240U 4轴步进/脉冲伺服马达控制卡,适用于通用型机构运动控制.PCI-1240U为PCI总线型高速4轴动作控制卡,可简化步进式及脉冲式伺服马达控制,并充分发挥马达的潜能.此外,当使用PCI-1240U驱动这些动作时并不需要占用处理器负载.
1.2 系统运动学模型
由于一个线结构光视觉传感器只能获得局部的三维信息,需要结合运动机构的旋转平移等运动信息以获得完整的三维测量数据.
首先建立三轴运动平台的坐标系,旋转轴坐标系为orxryrzr,俯仰轴坐标系为opxpypzp,平移轴坐标系为otxtytzt.因为3个坐标系的相对位置是随运动变化的,很难精确计算.并且由于在orxryrzr下物体只绕X轴旋转,opxpypzp下只绕Z轴旋转,otxtytzt下只沿着Z轴平移运动.因此只要计算出orxryrzr的X轴,opxpypzp和otxtytzt的Z轴在世界坐标系下的表达式即可以反算出待测物体的三维型面数据.通过调节激光的光平面使得zt轴与光平面垂直,将世界坐标系的Z轴定义为zt,xs轴垂直向上,ys轴由右手定则确定,这样可以近似忽略平移轴的参数标定,简化标定复杂度,如图1所示.
设沿 zt平移的向量为(0,0,t),绕 zp旋转的角度为θp,绕xr旋转的角度为θr.则当前坐标系下点变换为统一坐标系下点的转换关系如下:

式中:(xs,ys,zs,1)为当前坐标系下点的齐次坐标,(x's,y's,z's,1)为统一坐标系下点的齐次坐标,M=R(x'r,θr)× R(z'p,θp)× T(t),z'p是 zp沿 zt平移向量(0,0,t)后的结果,x'r是 xr沿 zt平移向量t后再绕z'p旋转θp后的结果.
文中使用角-轴法表示旋转矩阵,即旋转可以通过所围绕的单位向量)ν=(x,y,z)且 |)ν|=1和旋转角度θ来定义,θ的正负由右手定则判定.旋转矩阵表示如下:

平移矩阵表示如下:


图1 运动轴坐标系模型
1.3 系统运动模型参数标定
为了确定旋转轴和俯仰轴的中心轴线在世界坐标系下的位置,需要进行转轴标定,也就是获得转轴上一点在全局坐标系下的坐标及转轴的方向矢量.本文使用高低球法进行轴心线标定[11],具体做法为首先将一个球固定在转台上,利用自主研制的激光测量头扫描该球并对扫描的数据进行空间球拟合,这样可以得到该球的球心位置,然后旋转转台,再次对该球进行扫描并拟合球,又能得到此刻球心的位置.多次执行以上操作,就可以得到多个球心的位置,最后将这些球心点的位置使用拟合空间圆的方法得到圆心的位置.将标准球位置升高或降低后重复上述测量步骤即可得到一系列的圆心位置,最后利用最小二乘方法得到所有圆心的最佳拟合直线,并将该直线的方向向量作为旋转轴.
1.4 三维数据反算
系统工作前首先需要分别用文献[6]和文献[8]的方法标定线结构光视觉传感器中摄像机和光平面的模型参数,然后按照1.3节的方法计算出系统轴的参数.扫描过程中,利用传感器的测量模型计算激光点的三维坐标,再根据式(1)计算出被测点的变换矩阵,将激光点的三维坐标转换到统一坐标系下,从而实现牙模型面信息的获取.
2 系统软件架构
数字化牙模激光扫描系统集牙齿数据的采集、数据的处理、人机交互操作、牙齿修复体数字化建模等系列功能于一体.本系统界面友好,操作简单,功能完善且功能模块集成度高,可以满足牙齿数据的实时显示与处理.由于篇幅所限,仅给出系统软件的主界面,如图2所示.
1)控制模块:实现对运动机构以及激光测头的控制.
2)接口模块:完成数据采集、读取以及存档.
3)显示模块:基于OpenGL实现三维数据的显示以及人机交互操作.
4)算法模块:实现软件的算法功能,是软件的核心部分.
3 系统标定实验以及精度分析
3.1 旋转轴标定
按照1.3节的方法对旋转轴进行标定.对大球和小球分别扫描了十组数据并拟合出每组数据的球心坐标如表1.
对每组数据点坐标分别拟合空间圆,其圆心坐标分别为(-1.653,17.902,6.051),(-2.115,14.214,5.991).这样就获得了旋转轴的轴心线信息.按照同样的方法也可以确定俯仰轴的轴心线位置.

表1 拟合球心坐标
3.2 精度分析
通过扫描一个半径已知的金属标准球得方法来验证系统的精度.本文采用文献[7]的方法提取图像中的激光条信息,另外为了减少环境光的干扰,需要在当前环境下调节激光线亮度以及图像的亮度和对比度.图3为系统装备实际工作图.
由于传感器是从顶部向下观察的,所以只能扫描到球体的上部数据.分别移动水平轴,俯仰轴和旋转轴,同时进行数据采集,可以尽可能多的扫描到球体的数据.实验数据扫描结果如下,单位均为毫米.
使用最小二乘法对扫描数据进行球拟合,拟合结果为:球心坐标为(0.241,15.023,5.396),球半径为9.820.以每个数据点到拟合球心的距离与拟合半径的差值作为该点的误差指标,实验的平均误差为0.167,最大误差为0.423,最小误差为0.000,实验中使用的标准球半径为10.002 mm,通过扫描数据拟合球的半径为9.820 mm,二者差值为0.182 mm.

图2 系统软件主界面
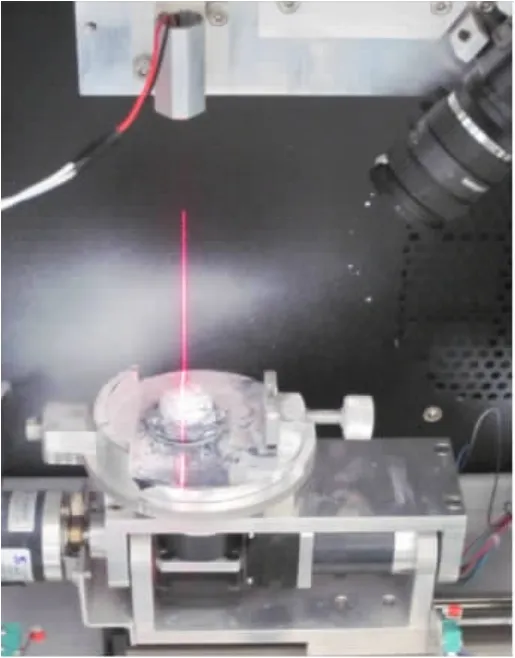
图3 装备工作
3.3 误差分析
通过实验结果可以看出本文设计的机械结构及其标定方法可以正常工作并满足一定的精度要求.但是从实验误差来看还是存在一定的问题,经过分析认为其误差产生的原因主要集中在以下几个方面.
1)运动轴标定方法存在的误差.本文在标定运动轴时理想地将水平运动轴认为与激光平面垂直,但是实际情况必然是存在一定的角度,这就导致了水平运动、俯仰运动、旋转运动都出现计算三维数据的不精确.因此通过精确地标定水平轴可以减小误差.
2)由于本系统在数据采集时是完全暴露在自然环境光下的.环境光的干扰导致数据采集存在一定的误差.这种误差可以通过设计封闭的工作空间来消除误差,也可以为摄像机添加滤光镜,屏蔽波长与激光波长不相近的环境光来减小影响.
3)摄像机标定存在的误差.该类误差主要靠改进摄像机标定方法来减小.
3.4 扫描实例
标定系统参数后,对一牙模进行数据扫描,图4为原始扫描数据经过去噪滤波[12]后的点云数据以及三角化[13]后面片数据的效果.可以看出,扫描的数据平滑,无断裂缝隙,表明该系统可以很好地对牙齿模型的型面数据信息进行复现.
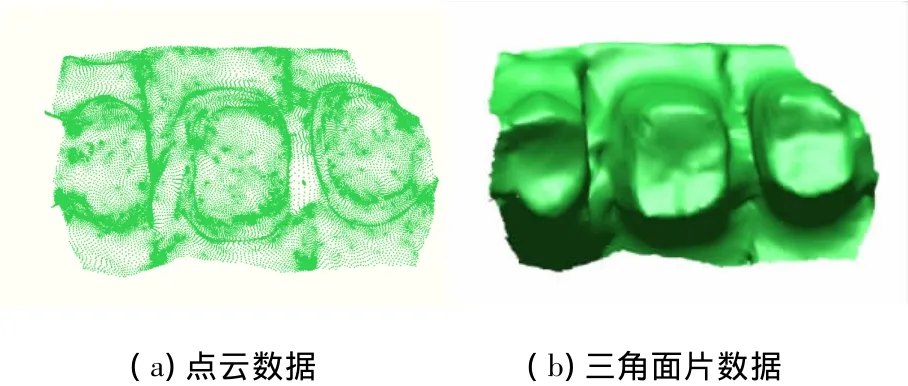
图4 牙模扫描数据效果图
4 结论
为了提高我国口腔医疗技术的现状,提出一种利用视觉测量原理,基于三轴联动平台的数字化牙模激光扫描系统.该系统实现了牙齿模型三维型面信息提取和牙齿模型的造型设计.通过视觉传感器和三轴联动平台的协调控制可以实现牙齿模型的无缝数据获取.实验结果表明,该系统整体精度在0.182 mm,速度为8 000点/s.具有扫描速度快、测量精度较高等特点,可以满足牙模三维型面数据采集的要求.
[1]戴宁.口腔修复体造型关键技术研究及其应用[D].南京:南京航空航天大学出版社,2006:1-18.
[2]CEREC 3D数字牙科椅旁系统[EB/OL].西安:西安交通大学口腔医院[2011-10-12].http://unit.xjtu.edu.cn/xamuoral/cms/plus/view.php?aid=2306.
[3]吕培军,李彦生,王勇,等.国产口腔修复CAD/CAM系统的研究与开发[J].中华口腔医学杂志,2002,37:367-370.
[4]魏斌,张文强,张富强.牙列缺损修复可编辑软件的研制[J].上海口腔医学,2002,11(3):250-253.
[5]高勃,王忠义,张少锋等.光栅变形条纹直接分析法用于牙冠形状的三维测量-正交验波法[J].实用口腔医学杂志,1998,14(2):1269 -127.
[6]ZHANG Z.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[7]STEGER C.An unbiased detector of curvilinear structures[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1998,20(2):113-125.
[8]ZHOU F Q,ZHANG G J.Complete calibration of a structured light stripe vision sensor through planar target of unknown orientations[J].Image and Vision Computing,2005,23(1):59-67.
[9]XIE Zexiao,ZHU Weitong,Zhang Zhiwei,et al.A novel approach for the field calibration of line structuredlight sensors[J].Measurement,2010,43(2):190 -196.
[10]GOLUB G,van LOAN C.Matrix computations[M].third edition.Baltimore,Maryland:The John Hopkins University Press,1996:223 -270.
[11]徐永安,杨钦,怀进鹏.激光旋转扫描测量系统中转轴标定及多视拼合[J].中国激光,2005,32(5):659-662.
[12]张毅,刘旭敏,隋颖等.基于K-近邻点云去噪算法的研究与改进[J].计算机应用,2009,29(4):1011-1014.
[13]NIE Jianhui,HU Ying,CHEN Xinyu.Fast triangulation method with step outside strategy[C].//Proceedings of ON CCDC 2010.Xu Zhou:China University of Mining and Technology Press,2010:4149 -4153.
[14]CHANG M C,FREDERIC F L,BENJAMIN B K.Surface reconstruction from point clouds by transforming the medial scaffold[J].Computer Vision and Image Understanding,2009,113(11):1130-1146.
[15]MANABU K,MASANAO I,SHUNSUKE M,et al.Trial of a CAD/CAM system for fabricating complete dentures[J].Dental Materials Journal,2011,30(1):93-96.
Novel digital laser dental scanning system
CHEN Xin-yu,HU Ying,MA Zi,NIE Jian-hui
(Automation Research Center,Dalian Maritime University,116026 Dalian,China)
In order to quickly obtain the 3D digital surface of the dental wax,an original design and achievement of a novel digital laser dental scanning system is introduced based on three-axis platform.3D surface and design of Dental model are implemented by the presented system which integrates optical,mechanical,electronic technologies,data processing technology and so on.The system consists of laser probe,three- axis platform,electronic control system,master computer and system software.3D point cloud of Dental wax without any blind point can be scanned through controlling line structured light vision sensor and three-axis platform in phase.Experiment demonstrates that the scanning precision of the system is 0.182mm,scanning speed is 8 000 pts/s.Therefore,the system works fast with high accuracy,its operation is simple and flexible,so it can meet requirements of collecting 3D surface of the dental wax.
reverse engineering;dental wax scanning;three-axis platform;axis calibration
TP203;TP391.4
A
0367-6234(2012)11-0139-05
2012-02-13.
中央高校基本科研业务费专项资金资助(No.2011QN120).
陈新禹(1986—),男,博士研究生;
马 孜(1955—),女,教授,博士生导师.
陈新禹,chensavvy@163.com.
(编辑 苗秀芝)
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
小天使·一年级语数英综合(2017年8期)2017-08-04 00:41:48
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中等数学(2017年2期)2017-06-01 12:21:50
小天使·一年级语数英综合(2016年11期)2016-11-28 21:41:40
光学精密工程(2016年3期)2016-11-07 09:03:34
创新作文(1-2年级)(2015年11期)2015-11-28 20:10:20
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38