
基于金字塔分解的分层光学相关匹配策略*
2012-07-11 08:48苗秀梅徐志军甘厚吉
舰船电子工程 2012年9期
苗秀梅 徐志军 甘厚吉
(1.海军装备部 北京 100841)(2.海司信息化部 北京 100841)(3.海军工程大学 武汉 430033)
1 引言
光学相关是以激光为光源,利用透镜的傅里叶变换特性和光学上的空间滤波原理,将待识别图像与参考目标图像进行相关运算,从而判断待识别图像中是否含有参考目标。它具有高速度、并行性等优点,因此对它的研究和应用日趋广泛[1~4]。其典型光路是光学4系统。纯光学系统缺乏灵活性,因此一般在输入平面和频谱平面放置可实时刷新其显示内容的空间光调制器[5~6]作为输入图像和匹配滤波器的载体,得到图1所示结构,这样纯粹的4f光学系统就变成了光电混合相关识别系统[7]。由于该系统需要进行光电和电光转换,所以相关运算并不能以光速来完成,因此在对海量图像数据进行处理时仍然需要通过一定的数据组织方法来提高效率。
对于海量信息的组织,目前比较有效的方法之一是多分辨数据组织方法[8],即根据人和设备接收或显示信息存在实际限制的特点,将海量数据按照分辨率进行组织和使用,以便减少数据的传输量和计算量。其核心思想是根据实际需要提供分辨率适当的信息。多分辨数据组织的主要形式就是金字塔型数据结构(Pyramidal Data Structure)。

图1 光电混合相关识别系统
本文将金字塔型数据结构用于光学相关匹配,以实现分层光学相关匹配[9~10],用于提高海量图像的处理效率。
2 图像金字塔原理
金字塔结构是对信息进行多分辨率分析的重要方法,概念简单而又有效。它最初在计算机视觉和图像压缩中使用。一个图像金字塔实质上就是一系列由一原始图像派生出来的图像的集合。一般将这一系列图像按照分辨率从高到低排列,分辨率最高的原始图像放置在最底部,分辨率越低位置越靠上,这样就呈现出如同金字塔一样的四棱锥形状(如图2所示),因而称之为图像金字塔。完整的图像金字塔,其最顶层图像仅为1×1像素;但在实际应用中金字塔一般没必要达到如此低的分辨率,可能在高层分辨率小到一定程度就不用继续降低了。
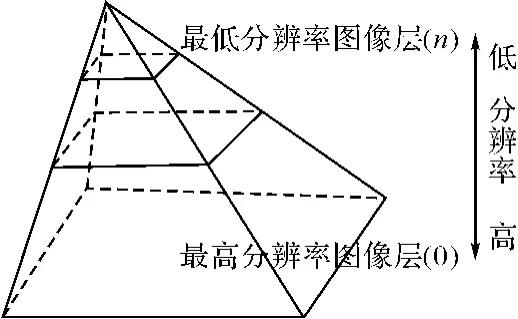
图2 金字塔型数据结构
目前图像金字塔已经在许多领域中得到成功的应用,比如:图像融合、图像编码压缩与渐进传输、海量图像/地形的实时显示、景像匹配等等。
在构建图像金字塔时,从低一层图像获得高一层图像的一般过程是:先对低一层图像进行滤波,然后以2为步长进行抽样。采用的不同滤波方法,得到不同类型的金字塔。比如:采用邻域平均法滤波可以生成均值金字塔,采用高斯低通滤波器滤波可以生成高斯金字塔,或者不滤波,直接进行抽样就生成子抽样金字塔。最终形成的金字塔的质量与滤波方法紧密相关。下面将对这几种金字塔结构做简要介绍[11]。
设原始图像G0的尺寸为2n×2n,记N=2n,则对应的金字塔为一个图像序列{Gk|k=0,1,…,n},其中Gk+1为Gk的一个低分辨率版本,通常分辨率相差2倍。将金字塔第k层第i行第j列处的像素记为Gk(i,j)。
2.1 子抽样金字塔
生成子抽样金字塔的方法很简单,将低一层的图像划分为一个个四邻域子块,即每个子块中包含像素数是2×2,各子块之间互不重叠,而所有子块合起来恰好覆盖该层图像;然后,将每个2×2子块中的某个像素的值赋给相应的父像素。
设第k层图像为Gk(i,j)(i≤M,j≤N),M,N为图像的行数和列数,则第k+1层子抽样金字塔由式(1)生成:

子抽样金字塔避免了数据膨胀,也不存在精度截断问题。但是,其图像质量相对较差;另外,父像素是简单的等同于某个子像素,所以不能反映其在低一层图像中所对应子块的整体信息,缺乏邻域代表性。
2.2 均值金字塔
生成均值金字塔的方法是:首先将低一层的图像划分为2×2的子块,这一步与子抽样金字塔类似;然后,对各子块中的4个像素取平均值,得到其在高一层图像中所对应的父像素的值。这样得到的金字塔,最高层图像的值为原始图像所有像素值的平均,中间各层是原始图像的“缩微版本”。
均值金字塔从第k层到第k+1层的构建公式为

均值金字塔具有较好的视觉效果,但也存在几个问题:首先,为了精确存储各子块的均值(即父像素的值),需要为小数部分分配额外的存储空间。为了解决这一问题,一般通过四舍五入舍弃小数部分。因此,实际使用的均值金字塔往往是“截断的”均值金字塔(Truncated mean pyramid)。其次,均值金字塔存在数据膨胀。
2.3 高斯金字塔
高斯金字塔是一种应用比较广泛的金字塔结构。在其生成过程中,首先将低一层的图像与一个高斯滤波函数进行卷积,然后再以2为步长进行抽样。这个过程实际上是用低通滤波器来逐步降低图像的分辨率。
高斯金字塔与均值金字塔一样存在数据膨胀。一般通过四舍五入来截断小数以使父像素与子像素占用同样多的比特数。
高斯金字塔的生成包含高斯低通滤波和隔行隔列的下采样两个过程,其从第k+1层到第 层的构建公式为
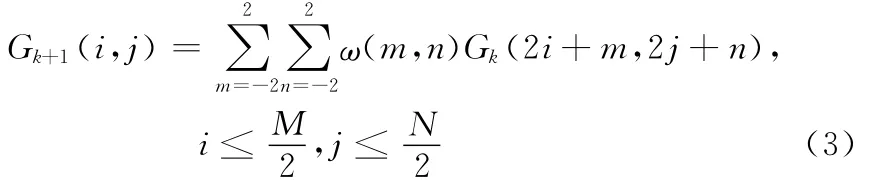
其中,ω(m,n)称为生成核,是一个窗口函数。式(4)是用了常见的窗口宽度5×5,其表达式为
这与归一化高斯分布近似,所以生成核近似为局部低通滤波器。
3 不同滤波方法对相关结果的影响

图3 用不同滤波方法得到的分辨率降低的图像
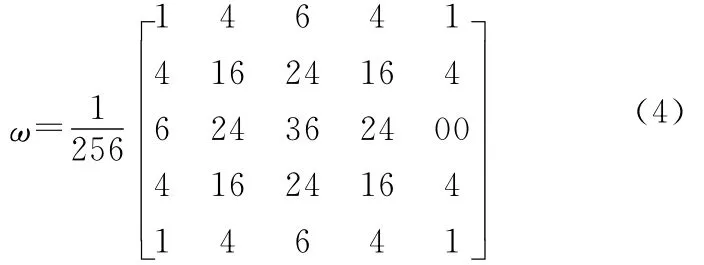
以图3(a)为原始图像(250×250),分别用上述三种金字塔中的滤波方法计算其上一级图像,分别如图3(b)、(c)、(d)所示。以这三幅图像作为滤波器模板分别制作匹配滤波器(采用二元纯相位编码方法[12~13]),并分别以其自身作为输入加载到光学相关器中进行实验,得到的相关输出结果分别如图4(a)、(b)、(c)所示。从图中可以看出,分别采用这三种滤波方法,相关输出几乎没有变化,因此本文在进行分层匹配时采用计算量和存储量均最低的直接抽样法。
4 目标尺寸对相关结果的影响
不同的分辨率下,同一目标的尺寸不同。如果目标尺寸过小,目标的透光面积较小,其光能透过率较低,相关识别得到的相关信号能量较低,因此在输出面接收到的相关峰值比较低。目标尺寸也不是越大越好,因为如果目标尺寸过大,则目标的频谱集中在低频部分,在同样的抽样间隔下匹配精度较低,尽管输入目标光能较高,相关识别得到的相关信号能量也会偏低,在输出面接收到的相关峰值也就较低。因此,存在着一个最佳的目标尺寸,当目标处于最佳尺寸时,输出相关峰值最高。下面通过光路实验获得相关峰值随目标尺寸变化的规律。

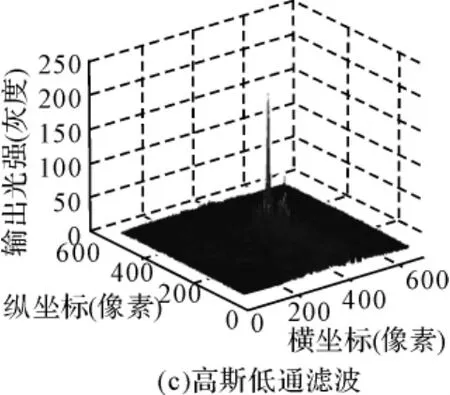
图4 不同滤波方法下的相关输出
将图3(a)进行缩放得到不同尺寸的目标图像,缩放比例范围为0.1~1.9,步长为0.1。以这样得到的19幅图像为参考图像分别制作匹配滤波器。将这19幅图像分别加载到光学相关器的输入SLM上,并在滤波SLM上加载各自对应的滤波器,采集相关输出结果。图5是相关峰值随目标尺寸变化的曲线。图6(a)、(b)、(c)是其中三幅相关输出图像。可见,目标尺寸在100×100~300×300像素范围内时,相关峰值较大且变化比较缓慢。目标尺寸超出此范围时,相关峰值迅速下降。
目标尺寸变化较大时,输出相关峰值波动较大,不利于相关峰的探测。因此需要限定目标尺寸的变化范围,从而使得输出相关峰值变化比较平稳。本文以最大相关峰值的0.707(图中的直线高度)对应的目标尺寸做为系统所容许的目标尺寸边界。从图中可以看出,当目标尺寸小于75×75或者大于375×375时,相关峰值小于最大相关峰值的0.707。所以系统所容许的目标尺寸为75×75~375×375。

图5 相关峰强度随目标尺寸变化的曲线

图6 目标在不同尺寸下的相关输出
5 分层相关匹配策略
要实现分层相关匹配,首先要用直接抽样的方法从原始图像构建子抽样金字塔。对于子抽样金字塔来说,任意高层金字塔图像都可以根据第零层图像(即原始图像)直接获得而不需要从低层到高层逐层进行。子抽样金字塔从第零层图像计算第k层图像的公式为:

在高层图像上进行相关匹配时,相应的模板图像也应同等程度降低分辨率,然后再制作匹配滤波器。将第 层图像切割成子图依次加载在相关系统的输入面上,与对应的匹配滤波器进行相关匹配。根据相关峰值的位置判断目标在对应子图上的可能位置,进而得到目标在整个第 层图像上的可能位置。然后根据这些位置确定低层图像(即分辨率较高的图像)的匹配范围,即在低层图像上不需要对所有子图做相关匹配,而只需要根据粗匹配相关的结果(即目标的可能位置)选择对应的少量子图进行相关匹配,以便最终确认图像上是否含有目标以及目标的位置。如图7所示,白色方框内图像即为要进行相关匹配的子图的示意图。

图7 分层相关匹配示意图
这种分层相关匹配方法首先在低分辨率图像层上进行粗匹配,确定匹配点的大概位置,接着在高分辨率图像层上进行精匹配以排除误匹配并确定匹配点的精确位置。尽管在某些区域要进行两次匹配,但由于全局搜索匹配只在低分辨率图像层上进行,所以该方法能够降低相关匹配次数,提高处理速度。即使分辨率只降低一倍,即在图像金字塔的第1层图像上进行粗匹配,那么图像数据量也能降低至原来的四分之一,因而处理速度可提高到原来的将近四倍。如果分辨率进一步降低,则处理速度可进一步提高。
由于系统所能适应的目标尺寸有一定的范围,所以图像分辨率不能无限制的降低。在匹配进行前应先根据图像分辨率以及系统所容许的目标尺寸范围确定恰当的金字塔层级,保证目标在该金字塔图像层中的尺寸在系统所能适应的范围内。
6 结语
为了提高光电混合相关识别系统对海量图像数据的处理效率,本文通过采用多分辨率金字塔数据组织方法,实现了分层相关匹配,大大提高了相关匹配效率。最后对系统所能适应的目标尺寸范围进行了研究,从而为确定恰当的金字塔层级提供了依据。
[1]T.Minemoto,T.Yao,T.Kawai,Real-time target recognition and tracking of vehicles moving on a street by matched filtering that uses quantization of modulated function to complexes of a quadruple[J].Applied Optics,2004,43(2):349-357.
[2]Thomas T.Lu,Casey L.Hughlett,Hanying Zhou,et al.Neural network post-processing of grayscale optical correlator[J].SPIE,2005,590810:1-10.
[3]Tien-Hsin Chao,Thomas Lu,and Hanying Zhou.Recent Progress on Grayscale Optical Correlator For Automatic Target Recognition[J].SPIE,2006,6245:31-38.
[4]Hanying Zhou,Casey Huglet,Jay C.Hanan.Development of Stre-amlined OT-MACH Based ATR Algorithm for Grayscale Optical Correlator[J].SPIE,2005,5816:78-83.
[5]王康俊.液晶空间光调制器及其应用[J].激光与光电子学进展,2009(6):65-67.
[6]任秀云,程欣,刘轩,等.基于空间光调制器的计算全息成像特性[J].光子学报,2005,34(1):110-113.
[7]甘厚吉,李刚,刘锋,等.光电混合相关识别系统中匹配滤波器缩放比例的确定方法[J].光学技术,2010,36(5):786-790.
[8]冯月明,黄建军,裴继红,谢维信.一种用于海量图像多分辨率局部重建的压缩算法[J].中国体视学与图像分析,2003,8(1):1-5.
[9]曹菲,杨小冈,缪 栋,等.快速景象匹配算法控制策略[J].导弹与航天运载技术,2005(3):46-50.
[10]金勇俊,李言俊,张科 基于对数极坐标变换的景像匹配算法研究[J].弹道学报,2007,19(4):86-88.
[11]谢耀华.海量影像存储与管理关键技术研究[D].国防科学技术大学,2009:18-21.
[12]李豫华,回红,刘锡久,等.纯相位二值化匹配滤波器的优化设计[J].中国激光,1999,26(10):897-901.
[13]吕银环,王国田,王汝笠.几种相关匹配算法性能的研究与分析[J].红外与激光工程,2003,32(4):72-376.
猜你喜欢
智能计算机与应用(2022年10期)2022-11-05
环球时报(2022-09-19)2022-09-19
现代计算机(2021年36期)2021-03-14
考试与评价·七年级版(2020年4期)2020-10-23
南京理工大学学报(2020年4期)2020-09-21
电子制作(2019年11期)2019-07-04
计算机应用(2018年12期)2019-01-07
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
小学教学研究·新小读者(2017年9期)2017-10-25
