
太阳能路灯模糊控制器
2012-07-09 01:44:32梁文翰贾文超
长春工业大学学报 2012年2期
梁文翰, 贾文超
(长春工业大学电气与电子工程学院,吉林长春 130012)
0 引 言
文中设计了一种太阳能路灯的模糊控制器,建立了铅酸蓄电池的充电状态与充电参数之间的关系,使得系统中蓄电池的使用寿命得到了可靠的保证。并且将模糊控制与传统的PID控制相结合,用以控制直流电压的输出。从而得到了一种Fuzzy/PID控制系统,与常规的PID控制系统比较,系统响应的超调量较小,反应速度快,而且具备控制结构简单、鲁棒性较强、可靠性较高的优点。
1 路灯智能控制器组成单元
1.1 太阳能路灯硬件构成[1-3]
太阳能路灯主要由太阳能光电池组件、蓄电池、控制器和照明灯具组成。系统框图如图1所示。
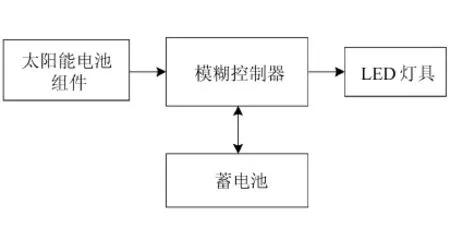
图1 太阳能路灯系统框图
1.2 模糊控制单元
模糊控制单元是本设计的核心,它主要完成的功能是合理控制蓄电池充放电过程。充电过程中,检测到太阳能电池板所产生的电能,利用模糊控制策略对蓄电池合理有效地充电,并且实时检测蓄电池的充电状态直到蓄电池充电完毕,将太阳能电池板所发出的剩余电能进行放电处理。放电过程中,将蓄电池内所储存电能合理地释放给LED发光负载,使路灯发光达到照明的目的。模糊控制单元框图如图2所示。
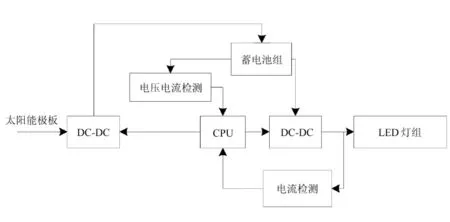
图2 模糊控制单元框图
2 蓄电池充电模糊控制策略的建立
2.1 双标三阶段浮充法
根据太阳能能源的特性对蓄电池的充电过程采取了一种双标三阶段浮充模型。双标三阶段充电示意图如图3所示。
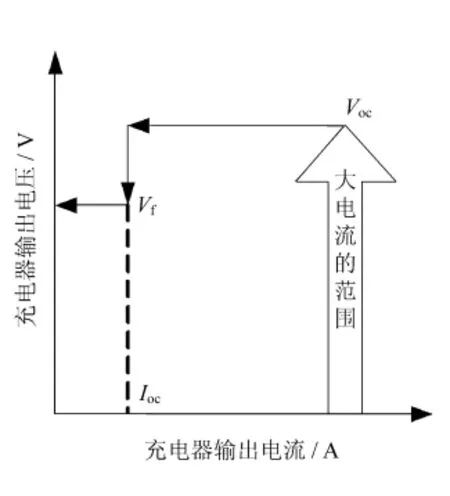
图3 蓄电池的双标三阶段充电示意图
双标三阶段浮充法中的双标指的是精确的浮充电压Vf和过标准开路电压Voc;将充电过程分为3个阶段,具体阐述如下:
第一阶段:当蓄电池两端电压小于过标准开路电压Voc时,系统将用能够获得的最大的电流值为蓄电池充电,直至其电压值达到Voc。此阶段的充电程度能够达到70%~90%。
第二阶段:在这个阶段中,必须将蓄电池的充电电压值恒定在Voc,并且要一直持续到充电率为Ioct时,才能进行第三阶段的充电。完成第二个阶段过程后,蓄电池的充电程度接近100%。
第三阶段:蓄电池的充电电压值恒定为Vf,目的是维持蓄电池的电压状态。此阶段的Vf必须精确,否则会大大降低蓄电池使用寿命。
2.2 太阳能路灯充电模糊规则建立[4-9]
2.2.1 太阳能路灯蓄电池充电输入的模糊化处理
2.2.1.1 蓄电池电压模糊化处理
确定电压值的范围为[0,Vmax](其中Vmax在归一化之后的值为1),在此范围内定义模糊集(j=1,2,…,15)。uAj1(xi)为四边形隶属度函数。
2.2.1.2 充电电流模糊化处理
确定电流值的范围为[0,Imax](其中Imax在归一化之后的值为1),在此范围内定义模糊集(j=1,2,…,21)。(xi)为高斯隶属度函数。
2.2.1.3 蓄电池温度模糊化处理
确定温度范围为[0,Tmax],(其中Tmax在归一化之后的值为1),在此范围内定义模糊集(j=1,2,…,10)。(xi)为四边形隶属度函数。
2.2.2 太阳能路灯蓄电池充电输出的模糊化处理
双标三阶段实时输出充电电压模糊化处理:确定电压值的范围为[0,Vmax](其中Vmax在归一化之后的值为1),在此范围内定义模糊集(j=1,2,…,41)。(xi)为高斯隶属度函数。
2.2.3 模糊规则的确立
如果:
2.2.4 建立模糊系统
采用乘积推理机、单值模糊器、中心平均解模糊器的模糊系统:

式中:l——模糊规则;
y-l——第l条模糊规则输出模糊集Bj*1的中心。
2.3 蓄电池放电Fuzzy/PID控制算法建立
简化模糊系统的输入输出变量为:输入压差VE(voltage error),输入电压变化率Rate,输出电压、电流的模糊阈控量Valve。
2.3.1 输入变量
1)将LED灯组负载的实时电压值与整个系统标定电压值之差作为输入压差VE,其隶属函数的模糊子集是:{low,okay,high},选用高斯隶属度函数。
2)LED灯组负载输入电压值的实时变化率Rate,其隶属函数模糊子集是:{negative,none,positive},选用高斯隶属度函数。
太阳能路灯Fuzzy/PID控制系统框图如图4所示。
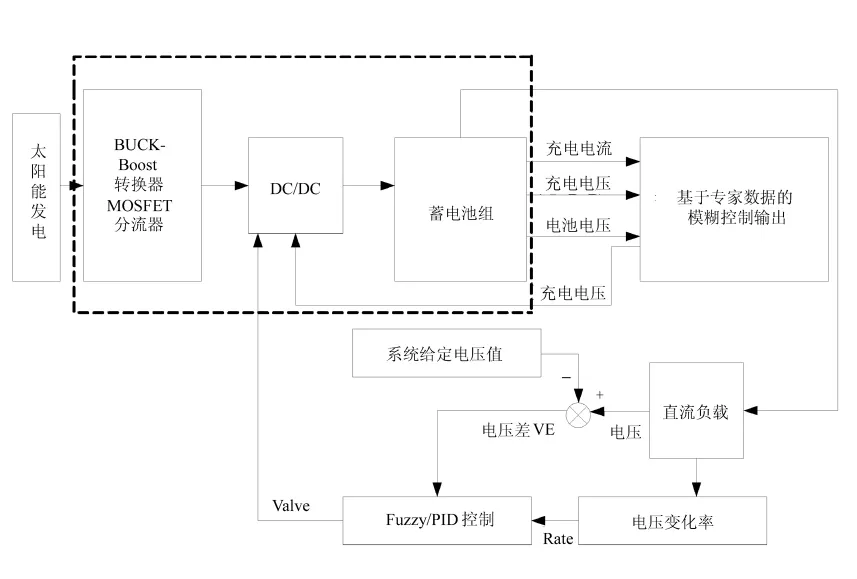
图4 太阳能路灯Fuzzy/PID控制系统框图
2.3.2 输出变量
Valve控制着DC/DC转换电路的占空比与MOSFET开关电路,其隶属函数的模糊子集是:{decrease-fast,decrease-slow,no-change,increase-slow,increase-fast},选用三角形隶属度函数。
模糊控制规则为:
rule 1if(VE is okay)then(valve is nochange)
rule 2if(VE is low)then(valve is increasefast)
rule 3if(VE is high)then(valve is decrease-fast)
rule 4if(VE is okay)and(rate is positive)then(valve is decrease-slow)
rule 5if(VE is okay)and(rate is negative)then(valve is increase-slow)
3 控制策略仿真实验
3.1 隶属度函数的仿真结果
隶属度函数的仿真结果如图5和图6所示。
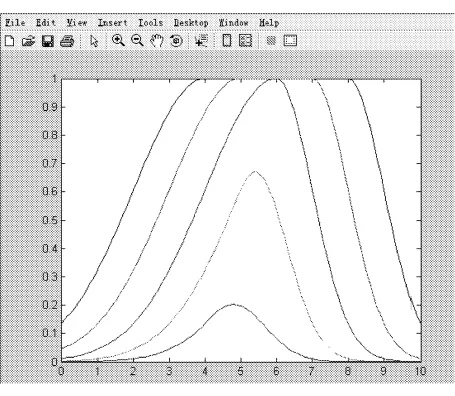
图5 高斯隶属度函数仿真结果
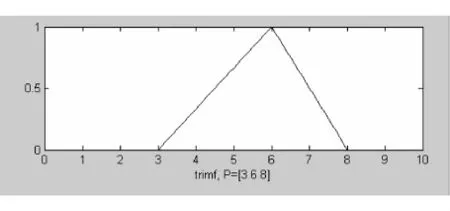
图6 三角隶属度函数仿真结果
其中,图5与图6分别表示了输入模糊变量与输出模糊变量的隶属度函数仿真结果。
由图中可见,高斯隶属度函数的仿真结果显示出级别划分较为细致,能够较好描述输入变量中的输入压差和直流负载输入的实时电压变化率的正确性。三角隶属度函数的仿真结果表明,输出变量能够得到准确的描述。
3.2 系统的阶跃响应
Fuzzy系统、PID系统、Fuzzy/PID系统的阶跃响应如图7所示。

图7 阶跃响应对比图
从仿真结果可以看出,Fuzzy/PID闭环控制系统结合了模糊控制与传统PID控制在阶跃响应方面的优点。与传统PID控制相比,Fuzzy/PID系统响应的超调量小、反应时间快,可以实现蓄电池输出过程的恒流控制。
4 结 语
设计的太阳能路灯模糊控制器合理建立起蓄电池充电参数和充电状态之间的关系,从而有效地控制了蓄电池充电过程,不仅可以提高蓄电池充电效率,而且充分保证了蓄电池的使用寿命。在控制LED灯组的直流输出环节中,将模糊控制与传统的PID控制结合在一起,形成Fuzzy/PID闭环控制。从仿真结果中可知,充电的隶属度函数建立正确,综合比较阶跃响应结果,Fuzzy/PID系统响应的超调量减少,反应时间加快,达到了LED路灯恒流控制的目的,适合太阳能路灯控制系统。
[1] 郭廷玮,刘鉴民.太阳能的利用[M].北京:科技文献出版社,1987:22-30.
[2] 朱松然.蓄电池手册[M].天津:天津大学出版社,2000.
[3] 王飞,余世杰,苏建徽.太阳能光伏并网发电系统的研究[J].电工技术学报,2005,20(5):72-75.
[4] 计长安,张秀彬,曾国辉.基于MCU的风光互补独立电源系统[J].电工技术,2005(7):59-61.
[5] 曹雅林.太阳能路灯工作原理及问题建议[J].城市亮化,2010(1):50.
[6] 朱德海.太阳能路灯充放电控制器的设计[J].数字技术与应用,2010(3):20-21.
[7] Zhang jinguang,Cao jing,Zhang xiandong.Wind and PV street light[J].Renewable Energy,2009,27(2):69-73.
[8] 张艳红,张崇巍,张兴,等.一种新型光伏发电充放电控制器[J].可再生能源,2006(5):71-73.
[9] 卢秀和,王琪,陈军,等.双供电路灯调光节能技术研究[J].长春工业大学学报:自然科学版,2007,28(s1):75-78.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
中学生天地(B版)(2021年10期)2021-10-27 07:12:58
成长(2021年1期)2021-01-03 14:19:34
现代装饰(2020年7期)2020-07-27 01:27:50
文萃报·周五版(2020年14期)2020-05-19 15:01:45
汽车维修技师(2019年7期)2020-01-16 04:33:04
运筹与管理(2019年10期)2019-12-17 06:07:12
汽车维修技师(2018年11期)2018-05-11 02:38:32
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
中国工程咨询(2015年6期)2015-02-16 05:33:58
