
宽风速运行的定子双绕组感应电机风力发电系统拓扑及控制策略
2012-07-06 12:32黄文新胡育文卜飞飞
电工技术学报 2012年7期
施 凯 黄文新 胡育文 卜飞飞
(1.南京航空航天大学江苏省新能源发电与电能变换重点实验室 南京 210016 2.江苏大学电气信息工程学院 镇江 212013)
1 引言
风能以其蕴量大、分布广泛和无污染等优势越来越受到世界各国的青睐,成为发展最快的绿色能源之一。但风能的随机性很强,季节性变化大,风速变化范围很宽,特别是在年平均风速不高的地区,风能常集中在低风速区。若能拓宽风力发电系统的风能利用范围,尤其是低风速区的风能利用能力,则能大大提高发电机组的总发电量。
目前常用的风力发电机主要针对风能丰富的风场开发,变速范围为1:2 左右。由于受到变换器容量以及系统成本的限制,通常都不去考虑利用低风速下的风能,因此不适用于年平均风速不高的风能欠丰富地区。本文针对这一问题提出了一种采用新拓扑结构的DWIG 风力发电系统,该系统拓宽了对低风速区风能的利用能力,可在宽风速范围内发电运行,可延长了风力发电系统的工作时间,从而可提高系统的总发电量。
DWIG 是本世纪初提出的一种新型发电机,其独特的结构和诸多优点引起了学者们的广泛关注。该发电机的转子为标准笼型结构,定子上有两套绕组,一套称为功率绕组,输出端接有励磁电容、整流桥和滤波电容,另一套称为控制绕组,连接滤波电感和电力电子变换器[1]。两套定子绕组只通过磁路耦合,易实现高性能控制,系统在变速变负载情况下能稳定运行,且输出的直流电压具有良好的动、静态性能[2-4]。功率侧的交流励磁电容经过容量优化后可大大减小控制变换器的容量,在1:3的宽转速范围内运行仅为发电机额定输出功率的三分之一左右[5,6]。鉴于这些优点,DWIG 发电系统已被应用于风力发电领域,并取得了初步的进展[7-9]。但是由于之前文献研究的多为通过弱磁控制实现的额定转速以上的宽转速运行,而风力发电系统绝大多数时间工作于额定转速以下范围,尤其是要充分利用低风速下的风能实现宽风速运行,先前的转速范围显然是不够的。此外,低风速下DWIG 风力发电系统的运行及控制也有待于进一步研究。
本文针对宽风速运行要求提出了一种新的DWIG 风力发电系统拓扑结构,通过高低风速下不同的运行控制策略,使得系统在低速直至额定转速以上的宽转速范围内均能输出稳定的高压直流,拓宽了低风速下风能的利用,其额外优势是并网运行时无需再接升压变换器,从而简化逆变系统的结构和控制。
2 系统结构与工作原理
本文研究的新型DWIG 风力发电系统结构如图1所示。风力机采用一级增速齿轮与发电机相连,发电机的功率绕组侧接有交流励磁电容,通过整流桥输出直流电能,控制侧绕组串联滤波电感后与变换器相连,变换器的直流母线端除了接有滤波电容外还有初始建压所需的蓄电池,起辅助励磁作用。相比于原有的DWIG 发电系统拓扑[1],增加了一只功率二极管将功率侧和控制侧母线的正端连接了起来,其负端直接相连。

图1 宽风速范围运行的DWIG 风力发电系统结构图Fig.1 The structure diagram of DWIG wind power system over a wide wind speed range
在低风速区运行时,发电机转速较低,即使电机内部磁场饱和,DWIG的功率绕组端电压也达不到指令电压,此时由控制变换器调节励磁维持发电机内部磁通不变,利用电压泵升原理将控制侧变换器的直流母线电压泵升到指令电压并稳定运行,电能由控制变换器的直流母线输出,并联两侧母线的功率二极管处于导通状态,功率绕组侧的整流桥则由于直流侧电压高于其交流侧电压而被自然阻断。随着风速的不断增加,发电机的转速逐渐上升,功率绕组侧整流输出的电压也随之升高,当其达到设定值并使得功率二极管反向截止时,电能由控制侧输出过渡到从功率侧输出。当系统在高风速区运行时,由控制变换器和交流励磁电容向发电机共同提供所需的励磁无功,通过调节控制变换器的无功电流大小来维持输出的直流电压恒定。
控制侧的变换器正常工作的前提是维持其母线电压恒定,考虑到在两种控制策略下均需要能够保持控制侧变换器的母线电压恒定,故在连接两侧母线时加入了单向功率二极管。若无功率二极管,直接将其相连,系统在两种控制策略切换运行时将会很不稳定。
由于本系统中DWIG的控制侧与功率侧母线电压额定值设计为相同值,而控制绕组侧存在滤波电感,运行时存在一定的压降,因此若要两侧的直流母线相连后能够保证一定的动态调节范围,并且在高风速下能实现功率侧整流输出电压的快速调节,设计电机时控制侧绕组匝数必须少于功率侧绕组,即控制绕组端电压低于功率绕组端电压。具体可根据直流母线电压的额定值以及系统仿真时的各项参数综合估算得到。
3 DWIG 瞬时功率控制原理
风力发电系统中的发电机多运行于低转速状态下,而磁链观测器在低转速下存在不可忽略的误差,所以DWIG 风力发电系统摒弃了以往采用的定子磁场定向控制策略,选择控制绕组端电压定向控制[9]。本文中仍然采用电动机惯例,图2 为控制绕组端电压定向矢量图,此定向方法对于分析系统中的瞬时有功功率和无功功率非常有效。如图2 所示,矢量Us在此同步旋转坐标系轴d 和q 轴上的电压分量可表示为


图2 控制绕组端电压定向矢量图Fig.2 The phasor diagram oriented by the control-winding terminal voltage
根据瞬时功率理论[10,11],在图2的同步旋转坐标系中,控制侧瞬时有功功率和无功功率可表示为

式中p,q—控制绕组瞬时有功功率和无功功率;
i—控制绕组电流矢量;
id,iq—i在Us所在轴线及其法线的投影。
由式(2)和式(3)求得瞬时电流的d 轴和q轴分量

化简后可得

可见,在任意转速下,调节控制绕组的电流id、iq便可控制系统的瞬时功率。而据文献[3]可知

而在变速运行时,改变控制绕组电磁转矩Tems即能实现控制侧直流母线电压UsDC的调节。调节控制绕组磁链ψs即可以控制功率绕组磁链ψp,进而控制功率侧输出直流母线电压UpDC[3]。
因此,综合式(6)~式(8)可知,在宽风速范围内运行的DWIG 风力发电系统中,通过对控制绕组电流在控制绕组端电压矢量Us及其法线上分量id和iq的调节,就能实现系统输出电压的控制,使系统在不同转速和负载下稳定运行。
4 低风速下DWIG 运行控制
发电机的绕组端电压与内部磁通和转速近似成正比,若发电机内部磁场未达饱和,在变速变负载运行情况下可通过调节磁通来保持输出电压恒定。但低风速下发电机转速太低,内部磁场由于饱和已失去调节作用,导致发电机端电压过低,功率侧整流桥输出电压无法达到指令值。因此本文在低风速下利用电压泵升的原理,将电能由电压较低的电机端部泵升至变换器的直流母线,从而使母线电压达到指令值。此时系统从控制侧变换器直流母线输出有功功率,而功率侧的整流桥由于变换器直流母线电压比功率绕组侧电压高出甚多而处于阻断状态。
4.1 电压泵升原理
系统在低风速下控制侧变换器的电压泵升类似于变频器调速中的能量回馈制动,当制动时滑差突变为负,电动机工作于发电状态,不管电机绕组的反电势有多低,其再生的能量均会在主开关管断开时通过续流二极管回馈至直流侧。
文中DWIG 控制绕组与控制侧变换器的硬件连接如图3 所示,变换器为三相电压型逆变器,由6个IGBT 及与其反并联的二极管组成,发电机控制绕组的漏感和滤波电感作为储能电感。当变换器选择零矢量000 或111 时,相当于电机的三相控制绕组短接,绕组的感应电动势作为电源,能使电机相电流增加,使回路中的储能电感蓄能。当变换器选择非零矢量时,则回路中电感上的储能会通过反并联二极管将能量泵升至直流母线。可见图3 所示的硬件拓扑,完全满足泵升变换器直流母线电压的条件。通过检测直流侧滤波电容的两端电压,形成电压闭环对控制侧变换器的PWM 占空比进行实时调节,从而实现将控制侧绕组上较低的电压泵升至较高的直流母线电压,使其达到并稳定于指令值。

图3 控制绕组与控制侧变换器的连接图Fig.3 The connection diagram between the control winding and the converter on the control side
4.2 电压控制策略
低风速时功率侧的整流桥已经断开,系统有功和无功的控制均由控制侧的变换器承担,此时控制绕组与控制变换器之间的功率流动关系示意图如图4 所示。其中P、Q分别代表有功功率和无功功率,PL、Pr分别表示控制绕组和滤波电感上消耗的和流过控制变换器的有功功率,PC、PR分别表示直流电容和负载上的瞬时有功功率,QL、Qr分别表示经过滤波电感和变换器的无功功率。

图4 控制绕组与变换器之间的功率流动关系示意图Fig.4 The power flow schematic diagram between the control winding and the converter
由图4 可以看出,系统的无功仅在控制变换器的交流侧流动,直流电容不参与无功的交换,而有功功率则可以通过控制变换器从交流侧向直流侧流动,控制侧直流母线电压的稳定就代表着变换器输入输出有功功率的平衡。当Pr大于PR时,多余的能量会对直流侧滤波电容进行充电,电容两端电压会随之上升。同样,一旦系统输出有功功率PR超过Pr,电容会瞬时放电,直流侧电压将跌落。所以变换器的有功损耗以及直流母线端所带功负载决定了系统有功电流的大小,通过变换器直流母线电压UsDC的反馈经PI 调节器即可得到有功电流的给定。
系统在低风速下保持变换器直流母线输出电压恒定的同时,为了保证电机的带载能力,还需要维持发电机内部的磁通不变。控制绕组每相的感应电动势有效值为

式中Es—绕组每相感应电动势有效值;
f1—发电机的同步频率;
Ws—每相串联匝数;
kws—绕组因数;
Φm—电机主磁通。
由式(9)可知,在变速变负载运行时要保持电机主磁通Φm不变,必须相应地改变Es才能实现。然而,绕组的感应电动势Es是难以直接控制的,若忽略绕组的漏磁阻抗压降,认为控制绕组的相电压Us≈Es,则可以通过控制相电压Us来达到维持电机主磁通不变的目的。
本文采用大小与相电压呈比例关系的控制绕组 电压矢量幅值作为控制电机主磁通Φm的变量,将采样后计算得到的反馈值与参考值相比较,经过PI 调节器得到无功电流给定。而在发电机转速不断变化时,需要保持曲线斜率不变,以维持发电机内部磁通恒定,的参考值可由f1来决定。随着风速的不断增大即f1不断上升,亦会不断增大。由式(4)和式(5)可以看出,的增大还会有助于降低系统运行时的有功电流id和无功电流iq,减小控制侧变换器的压力,有利于系统的稳定运行。
低风速下系统运行的控制框图如图5 所示,经过各自电压外环的PI 调节器后得到的有功电流给定和无功电流给定,实现有功和无功的解耦,通过控制绕组的端电压定向角,即可得到控制绕组 给定电流为

式中θ—控制侧端电压定向角。

图5 低风速下DWIG 系统控制框图Fig.5 The control diagram of the DWIG system under the low wind speed
5 高风速下DWIG 电压控制
在高风速下,发电机的转速升高,功率侧整流桥输出的直流电压达到了指令值,控制侧直流母线并联至功率侧的二极管变为关断状态,系统发出的电能转为从功率侧输出。由于控制侧与功率侧仅有磁路上的耦合,因此在高风速下变速变负载运行时具有更出色的动、静态性能和带载能力。
高风速下系统的无功电流由励磁电容和控制变换器共同提供,由于励磁电容提供的部分不可调节,因此变速变负载运行时引起的直流电压变化通过调节控制变换器的无功电流来补偿维持其恒定。高风速下采用功率侧直流母线电压UpDC作为控制无功电 流的分量,由UpDC的闭环控制通过PI 调节器得到。
由于此时控制变换器直流母线已不再输出有功功率,但是变换器并非理想装置,正常工作时会因线路电阻、开关损耗等原因产生有功损耗。为了维持控制变换器直流母线电压UsDC的稳定并保证变换器的正常工作,仍然需要调节有功电流,对UsDC进行实时控制。
高风速下系统的电压控制策略如图6 所示[3],将定子绕组两侧的母线电压UsDC和UpDC分别与其参考电压比较,经过PI 调节器后得到有功电流给定和无功电流给定,调节控制绕组电流id、iq便 可控制系统的瞬时有功和无功,实现DWIG 风力发电系统定子绕组两侧的直流母线电压控制。

图6 高风速下DWIG 系统控制框图Fig.6 The control diagram of the DWIG system under the high wind speed
6 实验论证
实验用DWIG的主要参数见表1,控制绕组与功率绕组的匝数比为 52:60。采用西门子变频器MM440 拖动普通异步电机来模拟风力机[12]。本文主要考察的是提出的系统新拓扑及控制策略的正确性与可行性,实验时负载采用电阻性负载。系统中控制侧变换器的主电路 IPM 模块采用三菱PM150RLA120,控制绕组和功率直流侧的电容为1100μF/900V。功率绕组交流励磁电容器,采用星型接法,励磁电容设计为140μF。控制绕组侧电流、电压霍尔传感器的参考方向按电动机惯例连接,滤波电感为L=4mH。控制器采用 Freescale 公司的MC56F8346 型DSP 和Lattice 公司的M4A5-128/64型 CPLD 一起构建控制平台,系统控制周期为100μs。

表1 实验电机的主要参数Tab.1 The primary parameters of experimental prototype
为验证系统在低风速下发电运行能力,经实验验证在 48V 蓄电池的初始励磁下,DWIG 在500r/min 时即可建压成功输出有功功率。由于实际切入风速与风轮机和叶片密切相关,故本文不再给出确切的风速大小。系统的电压电流波形如图7 所示,控制侧变换器直流母线成功泵升至额定600V 稳定运行,的参考值为200V。
图 8 为系统在转速上升到 900r/min 时突加6.5kW 负载时的电压电流波形。由实验波形可以看出,系统的动态性能良好,突加负载瞬间,变换器直流母线电压出现少许跌落,但是很快恢复稳定在给定值。
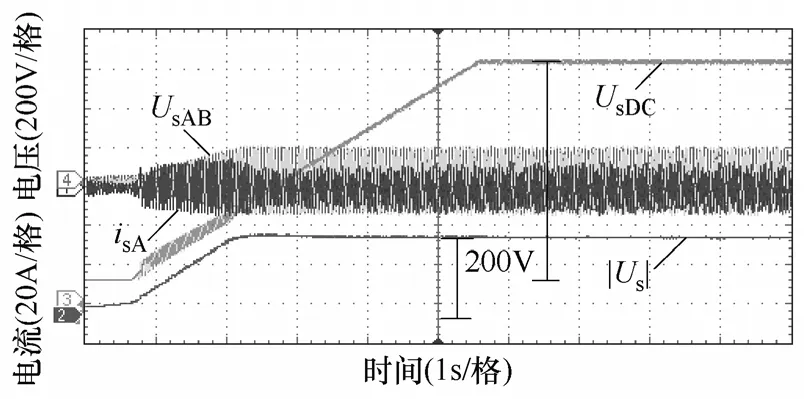
图7 500r/min 系统建压过程电压电流波形Fig.7 Voltage and current waveforms of the system built up at 500r/min

图8 900r/min 加载6.5kW 时系统电压电流波形Fig.8 Voltage and current waveforms under step load 6.5kW at 900r/min
当转速上升至将近1 100r/min 时将系统切换至功率侧输出电能,此时控制侧直流母线电压维持600V 不变,但无需再承担输出电能的任务。功率侧给定600V,依靠变换器调节系统的无功功率来维持输出直流电压恒定。图9 给出了由控制侧输出电能切换至功率侧输出的电压和电流波形。

图9 控制侧切换至功率侧的系统电压电流波形Fig.9 Voltage and current waveforms during the switchover course from the control side to the power side
进入高风速区后系统均由功率侧来输出电能,图10 给出了发电机上升至额定转速时的系统电压电流波形图,可见系统在额定转速带载运行时输出电压稳定,波动较小。
当风速由高到低减小时,系统将会从功率侧输出电能切换回控制侧变换器直流母线输出,图11

图10 1 500r/min 功率侧输出电能的系统电压电流波形Fig.10 Voltage and current waveforms as the electric power is transferred from the power side at 1 500r/min
为1 050r/min 切换转速时的电压和电流波形。当转速正好处于切换值附近时,风速的变化可能会引起两种运行状态及控制策略之间的频繁切换。但是由于转速属于机械量,时间常数比电气时间常数要大得多,因此在电磁控制过程中转速的变化对于系统的扰动影响甚小。同时,为了进一步地减小这种情况的出现所带来的影响,本文在控制软件中设置了一个转速滞环比较器用于判断切换控制策略,环差定为50r/min。从实验结果图9 和图11 看,滞环比较器的作用明显,系统在控制策略切换时运行稳定。
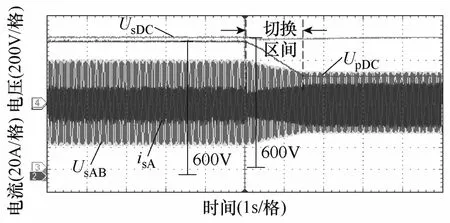
图11 功率侧切换回控制侧的系统电压电流波形Fig.11 Voltage and current waveforms during the switchover course from the power side to the control side
本文测试了DWIG 风力发电系统从最低速至电机最高转速运行时的带载能力,具体数据见表2~表4。图12 为表2~表4 中发电机转速和输出功率的实测和拟合曲线图,额定风速以下输出功率与转速的拟合关系为P=9.269×10-9×n3,跟风力机和风速之间的三次方关系基本符合。在额定转速以上,系统维持输出恒定功率。

表2 低风速下控制侧带载测试数据Tab.2 The primary parameters of experimental prototype

表3 高风速下功率侧带载测试数据Tab.3 Test data operating under high wind speed

表4 额定风速以上功率侧带载测试数据Tab.4 Test data operating above the rated wind speed
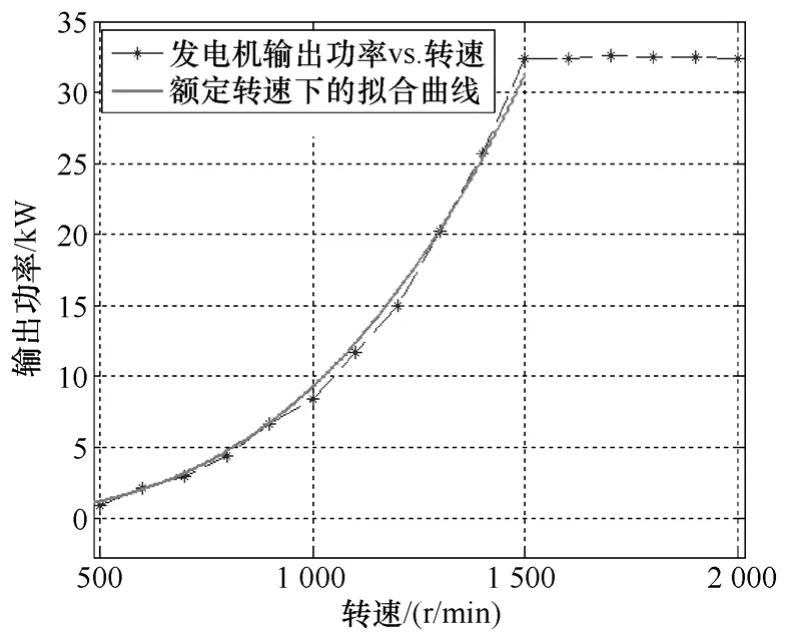
图12 发电机转速与输出功率的拟合曲线Fig.12 The fitting relationship between the rotor speed and the output electric power
7 结论
本文采用控制侧与功率侧的直流母线输出端通过功率二极管相并联的新拓扑结构,在低风速和高风速下采取不同的运行控制,交替从控制侧和功率侧的直流母线输出电能,使得DWIG 风力发电系统在宽风速范围内均能输出稳定的高压直流,充分利用了低风速下的风能,解决了宽风速利用风能的难题。样机系统在 500r/min 即可实现可靠建压至600V,在500~2 000r/min的1∶4 转速范围内均能输出稳定的600V 高压直流,并且能够稳定可靠地运行,其带载能力符合风力机特性,有助于实现风能追踪。
[1]Olorunfemi Ojo,Innocent Ewean Davidson.PWM-VSI inverter-assisted stand-alone dual stator winding induction generator[J].IEEE Transaction on Industrial Application,2000,36(6):1604-1611.
[2]李勇,胡育文,刘陵顺,等.带整流桥负载的定子双绕组感应发电机系统宽转速运行时的稳态特性[J].中国电机工程学报,2008,28(17):125-131.Li Yong,Hu Yuwen,Liu Lingshun,et al.Characteristic of the dual stator-winding induction generator system operating over a wide speed range[J].Proceedings of the CSEE,2008,28(17):125-131.
[3]李勇,胡育文,黄文新.变速运行的定子双绕组感应电机发电系统控制技术研究[J].中国电机工程学报,2008,28(20):124-130.Li Yong,Hu Yuwen,Huang Wenxin,et al.Research on the dual stator-winding induction generator with variable speed operation[J].Proceedings of the CSEE,2008,28(20):124-130.
[4]李勇,胡育文,陈光辉,等.基于直接功率控制的定子双绕组感应发电机系统电压调节技术[J].中国电机工程学报,2008,28(26):111-117.Li Yong,Hu Yuwen,Chen Guanghui,et al.Voltage regulation for the dual stator-winding induction generator based on the direct power control[J].Proceedings of the CSEE,2008,28(26):111-117.
[5]Li Yong,Hu Yuwen,Huang Wenxin,et al.The capacity optimization for the static excitation controller of the dual stator winding induction generator operating in a wide-speed-range[J].IEEE Transactions on Industrial Electronics,2009,56(2):530-541.
[6]刘陵顺,胡育文,黄文新.变速运行的双绕组感应发电机控制绕组无功容量的优化分析[J].电工技术学报,2006,21(3):94-99. Liu Lingshun,Hu Yuwen,Huang Wenxin.Optimal analysis of reactive capacity of control winding for dual stator-winding induction generator operating with variable speed[J].Transaction of China Electrotechnical Society,2006,21(3):94-99.
[7]Bu Feifei,Huang Wenxin,Hu Yuwen,et al.A novel 6/3-phase dual stator-winding induction generator system applied in wind power generation[C].IEEE PEDS,2009:1360-1365.
[8]Bu Feifei,Huang Wenxin,Hu Yuwen,et al.Optimal selection of excitation capacitor for 6/3-phase dual stator-winding induction generator with the static excitation controller applied in wind power[C].IEEE ECCE,2010:2397-2402.
[9]Shi Kai,Huang Wenxin,Hu Yuwen,et al.An indirect-field-oriented dual stator-winding induction generator for the wind power system applications[C].IEEE WNWEC,2009:1-5.
[10]Akagi H,Kanazawa Y,Nabae A.Instantaneous reactive power compensators comprising switching devices without energy storage components[J].IEEE Transactions on Industrial Application,1984,20(3):625-630.
[11]Peng Fangzheng,Lai Jih Sheng.Generalized instantaneous reactive power theory for three-phase power systems[J].IEEE Transactions on Instrumentation and Measurement,1996,45(1):293-297.
[12]王超,黄文新,王前双.基于异步电机的风力机特性模拟[J].电力电子技术,2010,44(6):7-9.Wang Chao,Huang Wenxin,Wang Qianshang.Imitation of the characteristic of wind turbine based on induction motor[J].Power Electronics,2010,44(6):7-9.
猜你喜欢
电子制作(2019年7期)2019-04-25
自动化与仪表(2018年7期)2018-07-31
电子制作(2017年1期)2017-05-17
军事文摘(2016年16期)2016-09-13
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
智能建筑电气技术(2015年5期)2015-12-10
云南电力技术(2015年2期)2015-08-23
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
