CRH1型动车组牵引系统的仿真研究
2012-07-05 02:58:22李瑞荣谭喜堂许春生
城市轨道交通研究 2012年6期
李瑞荣 谭喜堂 许春生
(1.广州铁路职业技术学院,510430,广州;2.同济大学电子与信息工程学院,200092,上海∥第一作者,副教授)
高速动车组具有行驶速度快、运行过程平稳、车内环境优雅、旅客乘坐感好等优势,得到了广大旅客的喜爱,成为人们出行的首选。目前,我国高速动车组技术正处于对国外技术的引进和吸收消化阶段。如何充分利用现有的有利资源与良好的外界条件来发展我国高速动车组技术,成为摆在我国机车研究者与“铁路人”面前的一道难题,迫切需要在短期内消化吸收国外的先进技术,以便为将来研制开发拥有100%自主知识产权的高速动车组做好充分的准备。CRH1型动车组是中国高速动车组的重要组成部分,对CRH1型动车组牵引系统进行仿真研究,有利于对CRH1动车组先进技术的消化吸收,为CRH1型动车组的技术革新及进一步开发新型高速动车组提供理论参考。
1 CRH1型动车组牵引系统概述
CRH1型动车组由8辆车构成1个基本编组,并分成3个基本单元,如图1所示。其包含4种类型的车辆:①车端带司机室的动车(Mc1,Mc2);②带受电弓的中间拖车(Tp1,Tp2);③不带受电弓的中间拖车(带吧台拖车,Tb);④中间动车(M1,M2,M3)。
CRH1型动车组属于交-直-交传动的电力牵引。其牵引传动系统的能量传递与转换过程,如图2所示。受电弓从接触网接受25kV、50Hz的高压交流电能,经过安装在车底架上的主变压器降成900V、50Hz交流电;降压后的交流电经网侧变流器转换成DC 1 650V直流电能;该直流电再由变流器转换成频率可变、电压可变的三相交流电送给牵引电动机;电能被转换成牵引列车的机械能。
2 牵引系统的数学模型
2.1 网侧变流器
CRH1型动车组网侧变流器采用的是两重四象限变流器系统。它由2个四象限变流器并联而成。动车组由高压交流接触网供电。四象限变流器主要是将已经降低幅值的交流电压变换为直流电压,供逆变器-异步电机牵引使用;在机车再生制动时,能够把电能反馈输送到电网中去。在四象限变流器使用过程中,应在直流侧提供平直的直流电流和直流电压,且使交流供电网保持很好的功率因数。四象限变流器在PWM(脉宽调制)信号控制下能够很好地满足这些要求,并且具有较快的动态响应。为了使四象限变流器网侧电流的等效干扰电流最小,一般采用多个四象限变流器并联的方式向异步牵引电机系统供电。每个四象限变流器的控制调制信号的三角载波互相错开一定的角度,使四象限变流器的输入电流的高次谐波互相错开,在牵引变压器二次侧电流总量中抵消部分谐波。四象限变流器系统主要由牵引变压器二次侧、四象限变流器、中间电路和PWM控制器等组成。

图1 CRH1型动车组的列车基本编组

图2 牵引传动系统的能量传递与转换过程示意图
为了建立网侧变流器仿真数学模型,可不考虑IGBT(绝缘栅门极晶闸管)和二极管的换流过程,把整流元件看成理想开关,忽略其中的保护电路,分别用一个电感和一个电阻元件代替牵引变压器的二次侧漏感和电阻。简化后的网侧变流器主电路拓扑结构如图3所示。
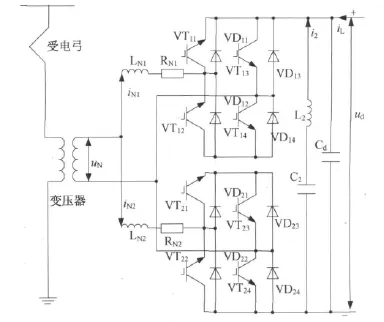
图3 两重四象限变流器系统结构图
PWM信号控制下的整流元件具有不同导通状态,相应的变流器系统具有不同的主电路拓扑结构,因此,应根据PWM控制信号和主电路拓扑结构的对应关系,建立各主电路结构的数学模型。两重四象限变流器系统的数学模型如下:

式中:iN1,iN2——变压器二次侧电流;
ud——中间直流电压;
i2——滤波电流;
u2——滤波电感电压;
uN——变压器二次侧电压;
iL——中间直流负载电流;
α、β、ξ、η——数学模型内部参数。
参数α、β、ξ、η和PWM信号的对应关系见表1。
2.2 矢量控制
CRH1动车组牵引电动机采用矢量控制的控制方式,决定牵引电动机运行状态的是加在其上的交流电压的频率和幅值。可将需要的电压矢量分解成磁链和转矩两个分量,这两个分量值作为磁场转矩控制器的输入量。电动机的实际磁场及转矩分量通过测量值和电动机数学模型(或观测器)实时计算出来作为磁场转矩控制器的反馈量,经过磁场转矩控制器的运算后输出一个电压矢量基准;用该基准矢量对PWM进行控制,生成变流器功率器件IGBT的触发控制脉冲,从而实现完整的电动机闭环控制。矢量控制框图如图4所示。
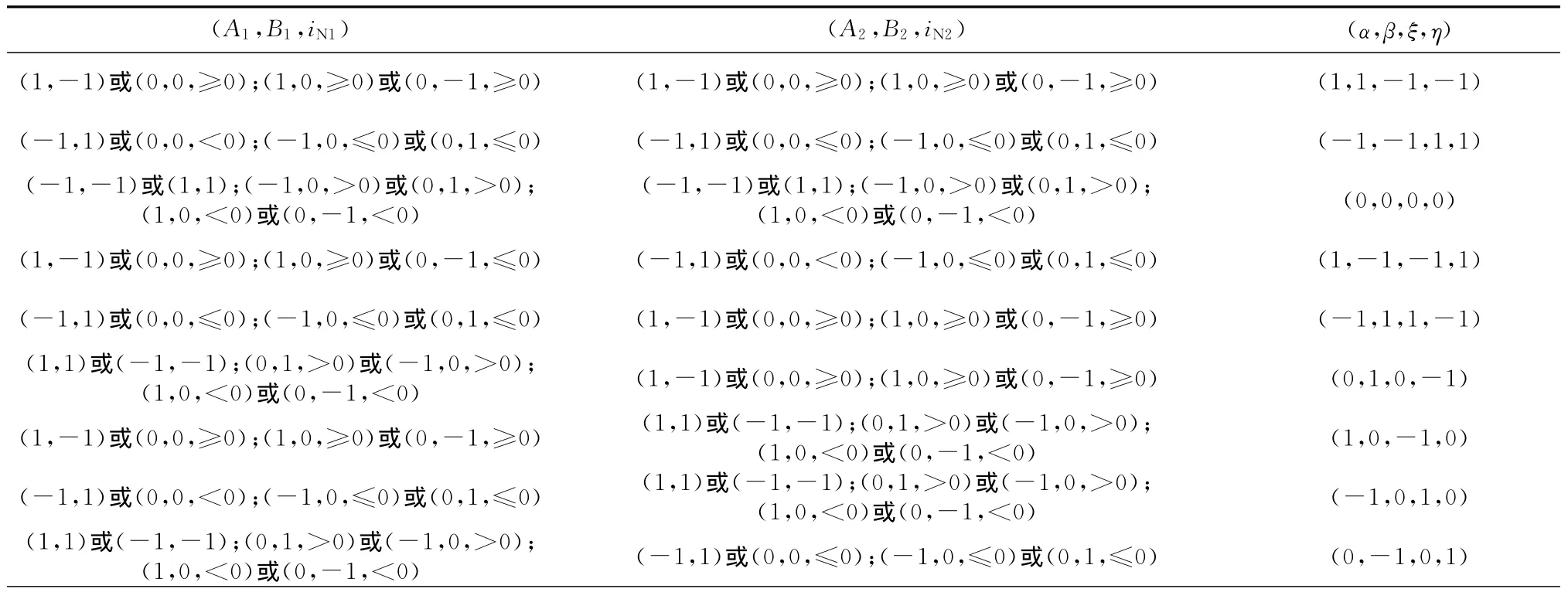
表1 数学模型内部参数与PWM信号的对应关系
在同步旋转的MT直角坐标系中,将M轴方向固定在转子磁场方向,因此矢量控制又称为磁场定向控制。在沿转子磁场定向的M、T同步旋转坐标系中,对于笼型转子异步电机,由于转子短路,则电压方程矩阵可简化为:

UsM——定子电压在M轴上的分量;
UsT——定子电压在T轴上的分量;
isM——定子电流在M轴上的分量;
isT——定子电流在T轴上的分量;
irM——转子电流在M轴上的分量;
irT——转子电流在T轴上的分量;
Rs——定子的电阻;
Rr——转子的电阻;
简单机械设备操作、调整技能;测绘制图技能;液压传动维护检修技能;生产工艺设备操作;调整技能及产品质量控制技巧等等能力。
Ls——定子的电感;
Lr——转子的电感;
Lm——定转子绕组间的互感;ωs——同步旋转角速度;
ω——转差角度频率;
定子在M轴和T轴上的电流如下:
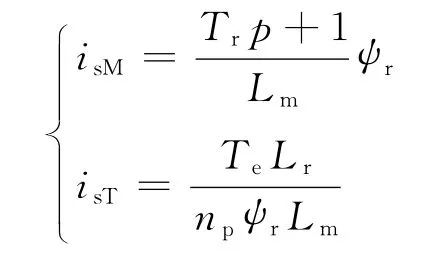
式中:
Tr——转子励磁时间常数,Tr=Lr/Rr;
ψr——转子磁链;
Te——电磁转矩;
np——极对数。
转差角度频率如下:
当转子磁链达到稳态并保持不变时,电磁转矩只由isT决定,此时磁链和转矩分别由isM和isT独立控制,磁链与转矩实现了解耦。
3 仿真与分析
在充分了解了CRH1型动车组的牵引传动与再生制动系统的总体结构和各个模块在整个过程中的作用之后,建立CRH1型动车组的牵引系统仿真模型。
3.1 仿真模型的搭建
在仿真软件 Matlab/Simulink环境下搭建CRH1动车组牵引系统的仿真模型(见图5)。参数设置依照CRH1型动车组原型[1]以及真车试验参数:交流电源为25kV、50Hz;变压器原边电压为25kV,副边电压为900V;牵引电动机的额定功率为265kW,额定电压为1 287V,额定频率为92Hz;定子电阻为0.098 4Ω,转子电阻为0.096 4 Ω;定子漏感为0.001 73H,转子漏感为0.001 71 H,互感为0.018 8H,极对数为2。
图5中的网侧变流器模块(Grid-side converter)的仿真模型如图6所示。
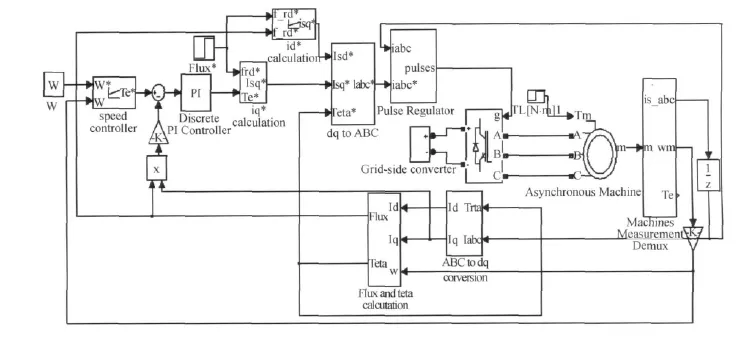
图5 CRH1型动车组牵引系统的仿真模型
3.2 仿真结果与分析
对CRH1型动车组的牵引系统进行仿真,当牵引电动机的转速从0变化至5 500r/min时,结果如下。
图7为CRH1型动车组仿真牵引过程中的网侧变流器输出的直流电压ud,在时间t=0~0.2s时,电压抖动比较大,随着时间的推移,电压始终维持在1 650V,基本符合真车试验数据。
图8为CRH1型动车组仿真牵引过程中,电动机转矩与转速的关系曲线。图8中,当转速在1 200 r/min以下时,电动机转矩基本维持恒定,为恒力区;当转速在1 200~5 500r/min之间时,牵引力受电机功率的限制,随着速度的升高而减小,维持在恒功区。图8的仿真曲线基本与图9的真车试验曲线相符。
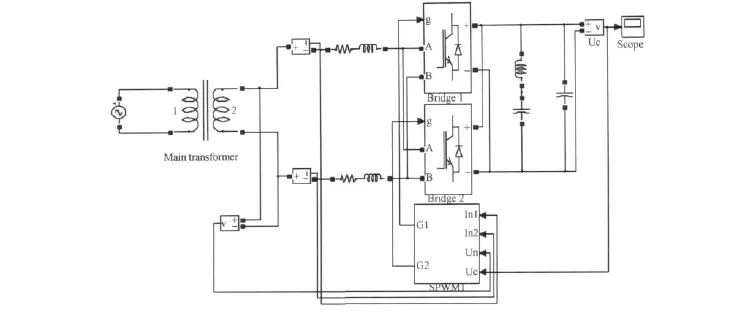
图6 CRH1型动车组网侧变流器仿真模型
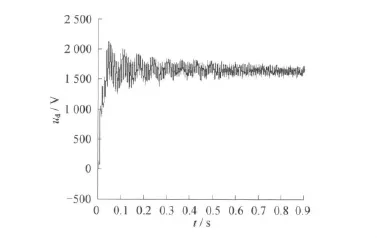
图7 网侧变流器输出的直流电压(仿真)
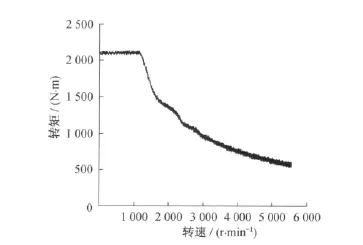
图8 牵引过程中电机转矩与转速的关系曲线(仿真)
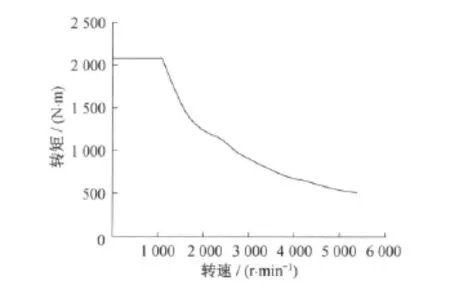
图9 牵引过程中电机转矩与转速的关系曲线(试验)
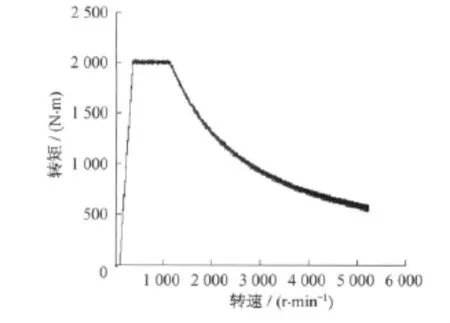
图10 再生制动过程中电机转矩与转速的关系曲线(仿真)
图10为CRH1型动车组仿真再生制动过程中,电动机转矩与转速的关系曲线。在图10中,当电机转速在300r/min以下时,由于转速太小,再生制动力基本为0;当电机转速在300~1 200r/min时,电动机转矩基本维持恒定,为恒力区;当转速在1 200~5 500r/min时,制动力受电机功率的限制,随着速度的升高而减小,维持在恒功区。图10的仿真曲线基本与图11的真车试验曲线相符。
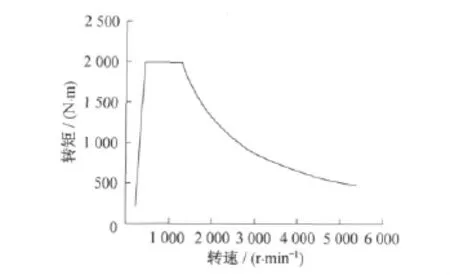
图11 再生制动过程中电机转矩与转速的关系曲线(试验)
4 结语
本文基于仿真软件 Matlab/Simulink平台,建立了CRH1型动车组牵引系统的仿真模型。仿真结果基本符合CRH1型动车组的真车实验情况。对CRH1型动车组牵引系统进行仿真研究,有助于对CRH1型动车组牵引系统进行参数优化,并为其它新型动车组及高速列车牵引系统的开发研究提供理论参考。
[1]张曙光.CRH1型动车组[M].北京:中国铁道出版社,2008.
[2]李华德.交流调速控制系统[M].北京:电子工业出版社,2009.
[3]黄永安,李文成,高小科.Matlab 7.0/Simulink 6.0应用实例仿真与高校算法开发[M].北京:清华大学出版社,2008.
[4]汤蕴璆,史乃.电机学[M].北京:机械工业出版社,2000.
[5]李波.四象限变流器PWM双闭环控制系统的计算机仿真[J].机车电传动,2000(3):16.
[6]王秀利,潘燕,冯江华.双重四象限变流器系统的半实物仿真研究[J].机车电传动,2006(3):15.
猜你喜欢
中学生数理化·高一版(2022年3期)2022-04-05 08:17:14
海峡姐妹(2020年2期)2020-03-03 13:36:34
铁道通信信号(2018年11期)2019-01-19 01:14:54
电子测试(2018年11期)2018-06-26 05:56:04
中学生数理化·七年级数学人教版(2017年4期)2017-07-08 11:48:34
制造技术与机床(2017年12期)2017-02-02 07:05:03
铁道通信信号(2016年11期)2016-06-01 12:11:26
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
中学生数理化·七年级数学人教版(2015年3期)2015-05-30 10:48:04