
小型激光三角探头光学系统设计
2012-07-05 08:41闫加俊安志勇高瑀含
长春理工大学学报(自然科学版) 2012年4期
闫加俊,安志勇,高瑀含
(长春理工大学 光电工程学院,长春 130022)
激光三角探头是基于激光三角法测距原理的一种精密测量仪器。激光三角法测量技术是利用激光的高度定向特点,将被测物体表面参数信息的光学信号通过光电转换器件转变为电信号,再经过计算机处理后,就可以得到物体表面参数信息的变化结果。由于激光三角法测量技术具有测量精度高、实时在线处理能力强、自动化、智能化程度高等优点[1],广泛应用于精密位移测量、轮廓形状检测等测量领域中[2~4]。
本文的研究目的是根据激光三角法测量原理研制一种小型化的激光三角探头。利用光学设计软件ZEMAX对激光三角探头中的光学系统进行优化设计,设计一套结构紧凑、口径较小、成像效果优良的光学系统作为激光三角探头中的光源整形光学系统和成像光学系统。文中主要研究了激光三角法测量技术的基本原理以及物像位移关系;利用光学设计软件ZEMAX设计了激光三角探头中的激光光源整形光学系统和成像光学系统,并对所设计的光学系统的像差进行了优化,获得了优良的成像质量,并且实现了激光三角探的小型化。
1 激光三角法测量原理
激光三角法是一种非接触式测量方法,利用光电探测器将物体位移量的光学信号转变为电信号,经过后续电路处理后,将物体的位移以数字形式输出,基本原理如图1所示,光源发出的光束经准直和聚焦光学系统后入射到被测物体表面上,经该点漫反射的光通过成像光学系统后成像在光电接收的光敏面上,当被测物体沿着光入射方向移动,或者表面发生变化时,入射光斑相对于原来位置产生变化,其相应的像点经过成像光学系统后在光电接收器光敏面上的位置也会发生变化,只要通过测量光电接收器光敏面上像点的位移δ就可以计算出被测物体的位移量ΔH。因为入射激光与反射激光形成一个三角形,因此这种测量方法被称为激光三角法。激光三角法按入射光线与被测表面法线的关系分为直射式激光三角法和斜射式激光三角法两种结构。本文中选用的是直射式激光三角法,为了提高测量的精度,在本系统中选择半导体激光器作为激光三角探头的发射光源,线阵CCD作为光电接收器。

图1 激光三角法测距原理图Fig.1 Principle of laser triangulation ranging
在直射式激光三角测距结构中,入射光束垂直于被测表面,只有一个准确的调焦位置,而其余位置的像都处于不同程度的离焦状态,从而引起像点的弥散[5],使系统的测量不完全,产生较大的误差。为了提高系统的测量精度,使光点所成的像在光电探测器线阵CCD接收面上每一点都能清晰成像,光路的布局需要满足“Scheimpflug”条件[6],即入射光轴、成像物镜主平面和线阵CCD三者延长线相交于一点,如图1中P点。其中l0和l1分别为物距和像距,物体的实际位移量DH,像点在线阵CCD光敏面上的位移为δ,入射光与成像透镜光轴的夹角为θ,线阵CCD与成像透镜光轴的夹角为φ。假设入射激光照射到被测物表面上的光斑正好落在成像物镜的光轴上,选该点作为测量的基准点,即图中的O点。按照几何光学近轴成像公式以及相似三角形边角关系,可以推导出物点位移与像点位移之间的关系为:

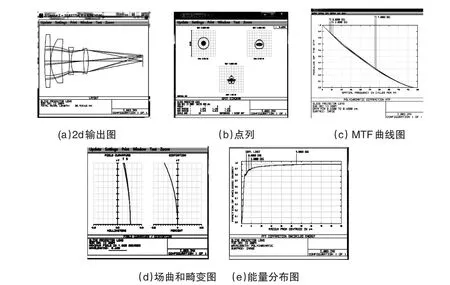
(被测面从基准点向上移动取“-”,向下移动取“+”)当物体的位移较小时,δsin()θ+φ< 在直射式激光三角法中需要满足的“Scheimpflug”条件为: 这里的β是激光三角位移传感器中成像光学系统的横向放大倍率。对于设计好的激光三角位移传感器,其l0、l1、θ、φ都是已经确定的值,因此只要知道像点的位移δ,就可以计算出被测物体的位移量。由于激光三角法测量具有测量精度高,非接触测量的优点,该测量方法已经广泛应用于现代工业精密测量领域中[7]。我们设计的小型激光三角探头主要技术指标和结构参数为: 探头外形尺寸:80×75×20(mm3); 工作距离: 10mm; 测量范围: ±1mm(9~11mm); 分辨率: 1μm; 光源: 半导体激光器 光电接收器: 线阵CCD(TCD1708D) 入射光与成像透镜光轴之间的夹角:θ=45°; CCD与成像透镜光轴之间的夹角:φ=11.3°。 激光三角探头采用半导体激光器作为照射光源,由于半导体激光器发出的光束发散角较大,像点在CCD光敏面上会占据较大的像元面积,降低系统的测量精度。所以半导体激光器发出的激光在照射到被测物体表面之前要进行准直和聚焦,减小光斑面积,提高系统测量精度。 准直光学系统的设计思路是根据几何光学中的“光路可逆”原理来反向设计,假设一束平行光经过一组透镜后会聚于一点,根据计算确定透镜的各个参数,反过来只要将光源放在透镜的焦点处,发散光经过透镜后就会获得平行光。实验中选用的半导体激光器的光束发散角为 θ⊥× θ∥=34°×8°,先对发散角较大的垂直方向的光束准直,选择非球面柱透镜来进行准直,透镜的数值孔径取0.44,透镜的宽度和厚度均为2mm。为了降低发射激光束光能的损失,半导体激光器的发光口要紧靠在透镜端面,但是由于半导体激光器封装的原因,光源外面有一层极薄的玻璃片,为了方便将半导体激光器与准直透镜之间的距离设置为0.1mm。将透镜的初始结构输入ZEMAX软件中的“透镜数据编辑器”中,经过反复测试与验证,得到了垂直方向准直柱透镜的参数,如图2所示。 图2 半导体激光器垂直方向准直透镜参数Fig.2 Parameters of collimating lens in vertical direction 水平方向的光束发散角较小,可以利用球面柱透镜来实现光束的准直,球面柱透镜的结构参数如图3所示,透镜厚度和宽度均为2mm。经过一系列优化后,水平方向的光束也得到了很好的准直效果。图4(a)、(b)分别是半导体激光器垂直方向和水平方向的准直效果图,可以看出经过准直系统后,光束发散角得到了较大的压缩,光束变为平行光,整个准直系统的设计是符合要求的。 图3 半导体激光器水平方向准直透镜参数Fig.3 Parameters of collimating lens in horizontal direction 在实际透镜的安装过程中需要将两个方向的准直透镜安装在同一光路中,并且两个透镜正交排列,根据需要适当调整两个透镜之间的间距,从而获得很好的准直效果。 图4 准直光学系统效果图Fig.4 Shaded model of collimating lens 准直后的光束截面较大,需要聚焦。用ZEMAX设计了一组两片式透镜来对准直光束聚焦,课题中激光三角探头的工作距离为10mm,聚焦系统的焦距设置为20mm。聚焦光学系统的初始结构参数如表1所示。 表1 聚焦光学系统初始结构参数Tab.1 Initial parameters of focusing system 上述初始结构的成像质量很差,满足不了聚焦要求,利用ZEMAX对上述初始结构进行优化设计,将光阑面设置在第一个透镜面上,系统焦距设置为20mm,通过定义恰当的优化函数,经过一系列优化后聚焦光学系统的结构参数图5所示。 图5 聚焦光学系统结构参数Fig.5 Parameters of focusing optical system 经过ZEMAX优化设计,聚焦系统的结构如图6(a)所示,有效焦距为20mm,后焦距为15.89mm。点列图如图6(b)所示,RMS半径为0.021 μm ,GEO半径为0.040μm,艾里斑大小为3.169μm,系统的弥散斑远小于艾里斑大小,因此聚焦效果很好。优化后的系统MTF曲线如图6(c)所示,系统MTF曲线平滑并且达到了衍射极限,所以该聚焦光学系统是符合设计要求的。 小型激光三角探头中,成像光学系统将被测物体表面参数的光学信息成像到光电接收器CCD上,成像质量的好坏是影响探头性能优劣的重要因素。小型激光三角探头的成像系统要求成像清晰、杂散光少、像面照度分布均匀、图像畸变小并且要求系统结构紧凑。 根据小型激光三角探头的技术指标可以确定成像系统的参数,选用的线阵CCD的像元间距为4.7 μm,系统的最小分辨率为1μm,所以成像系统的横向放大倍数至少为5,视场角计算为2ω=8°,焦距f=20mm,CCD的特征频率1(2 ×0.0047)=106.4 lp/mm,成像光学系统的分辨率与CCD探测器的分辨率要匹配。为了保证系统结构简单,增加光能量的透过率,光学成像光学系统所用的镜片应该为3~4片为最佳,光学系统总长不超过30mm,系统畸变要小于0.1%。 图6 聚焦光学系统优化结果Fig.6 Optimization result of focusing optical system 按照小型激光三角探头中成像光学系统的成像特点,从镜头数据库Zebase中选择一个类似功能的光学结构作为成像系统的初始结构进行重新优化设计。经选择某成像系统的初始结构参数如图7所示,焦距为100mm,视场角2w=24°,相对孔径D/f′=1/3。由于该光学结构可以将8个曲率半径和6个空气间隔以及玻璃材料作为变量,所以该系统能很好的校正各种像差。 图7 成像光学系统初始结构Fig.7 Initial parameters of imaging system 图8 成像光学系统优化结果Fig.8 Optimization result of imaging optical system 上述初始结构需要重新进行优化设计,重新设置波长和视场角,波长选择650nm,视场角取0°、2.8°和4°,通过ZEMAX缩放焦距的功能将系统焦距缩短为20mm。经过缩放焦距后的镜头成像质量很差,无法满足使用要求,需要对其进行优化。将各个透镜的曲率半径和厚度以及空气间隔设置为变量,建立评价函数。选择系统焦距和总长作为优化对象,操作数EFFL控制系统焦距,TTHI、OPLT操作数控制系统总长,并且自定义独立的几何像差评价优化函数,通过控制系统的球差、慧差、像散、场曲和畸变、以及平衡系统高级像差等优化措施,优化后的成像系统结构如图8(a)所示,有效焦距为20mm,后焦距10.53mm,光学系统总长为26mm。图8(b)是系统的点列图,可以看到成像系统成像的像点集中,最大弥散斑不大于2mm。图8(c)是优化后的MTF曲线,系统达到了衍射极限,在整个视场内,成像清晰,在内奎斯特频率(107lp/mm)处的MTF大于0.6,并且在整个视场内MTF曲线集中,没有明显分叉。图8(d)是系统的场曲和畸变图,系统畸变远小于0.01%,完全满足设计要求。图8(e)是全视场能量分布图,在像点半径大于4mm时,像点能量达到了总能量的90%,并且能量分布均匀,有利于CCD接收光能,减小被测物表面特性对测量精度的影响。由此可见系统符合小型激光三角探头的成像要求,系统成像清晰、结构紧凑、畸变小,具有实际应用价值。 小型激光三角探头是一种高精度的位移传感器,本文设计了一套用于小型激光三角探头的光学系统,包括光源整形光学系统和探头成像光学系统。在整形光学系统中采用两个正交排列的柱透镜对入射激光束进行了准直,获得了准直光。通过一个双分离透镜组对准直光束进行聚焦,使照射到被测物体表面的光斑非常小,提高了激光三角探头的测量精度。利用ZEMAX软件设计的小型激光三角探头中的成像光学系统,成像清晰、像面照度分布均匀、畸变小并且结构紧凑,实现了激光三角探头的小型化,具有实际应用价值。 [1]冯俊艳,冯其波,匡翠方.高精度激光三角位移传感器的技术现状[J].应用光学:2004,25(3):33-36 [2]王晓嘉,高隽,王磊.激光三角法综述.仪器仪表学报,2004,25(4):601-604 [3]刘薇娜,谢国红,基于CCD的激光三角位移法测液位的性能研究.自动化仪表,2009,31(7):19-21 [4]刘云清,佟首峰,刘鹏等.螺纹综合尺寸非接触光电测试系统.化工自动化及仪表,2005,32(2):61-63 [5]张以谟.应用光学[M].北京:电子工业出版社 2008:458-468 [6]王晓嘉,高隽,王磊.激光三角法综述[J].仪器仪表学报:2004,25(4):601-604 [7]邹振书,李喜增,张景和,高清峰.非接触测量激光光学探头[J].光学精密工程:1997,5(3):83-89

2 光源整形光学系统设计
2.1 准直光学系统的优化设计



2.2 聚焦光学系统的优化设计


3 成像光学系统设计
3.1 成像光学系统技术指标

3.2 成像光学系统的优化设计

4 结论
长春理工大学学报(自然科学版)2012年4期