航空发动机自抗扰控制器简捷设计与应用
2012-07-05 16:11:13李述清张胜修刘毅男周帅伟
航空发动机 2012年3期
李述清,张胜修,刘毅男,周帅伟
(第二炮兵工程学院,西安 710025)
航空发动机自抗扰控制器简捷设计与应用
李述清,张胜修,刘毅男,周帅伟
(第二炮兵工程学院,西安 710025)
针对航空发动机的强非线性特征,进行了自抗扰控制器(A D RC)技术在航空发动机控制系统中的应用研究。首先,从工程应用的角度出发,给出1种简捷自抗扰制器设计方法,从而减少需整定参数和以增强设计参数的物理直观性,以方便设计;然后,将该方法应用于某型涡扇发动机控制器设计。仿真结果表明:A D RC比PID控制方法有效。
自抗扰控制器;PID控制;设计方法;航空发动机
0 引言
PID控制是最早发展起来的控制策略之一。由于算法简易、鲁棒性好及可靠性高,其被广泛应用于过程控制和运动控制[1-2]。目前在国内外航空发动机研制中仍然广泛应用,并获得很好效果[3-5]。但由于基于线性系统设计,传统的PID控制器,对于航空发动机这类非线性较强或模型不确定性较强的被控对象,就变得能力有限了,相应的一些新型PID控制方法得以发展[6-7]。
针对经典PID控制的局限性,韩京清提出了自抗扰控制器(ADRC)[7-9],构造跟踪微分器,继而构造出非线性PID控制器,再根据反馈线性化原理,设计出能动态估计模型内扰和外扰的状态观测器,从而设计了1种新型非线性控制器。文献[8-9]中证明了自抗扰控制技术较经典PID控制具有超调小、精度高、适应性和鲁棒性强等优点。而且,由于ADRC具有不依赖于被控对象的模型、无须测量系统的扰动、算法简单、容易实现解耦控制等特点,已被众多学者、技术人员应用于广泛的控制领域[11]。
本文开展了ADRC参数整定简化设计方法研究,并应用于某型涡扇发动机转速控制器设计中。通过仿真,并与PID控制器进行比较,检验了该方法的有效性。
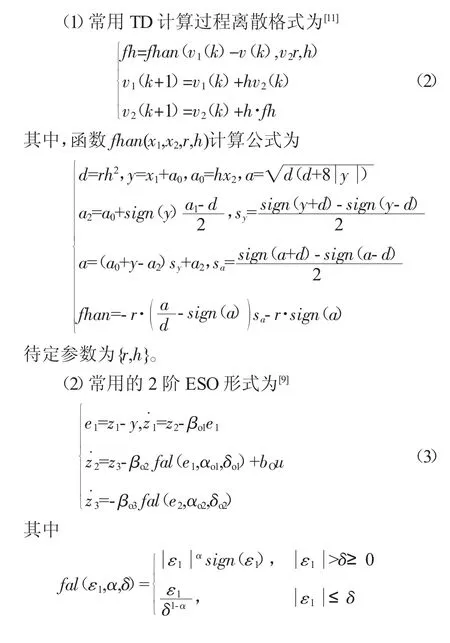
1 自抗扰控制技术
自抗扰控制技术不仅继承了经典PID控制简单、实用、有效的优点,而且融合了现代控制理论、非线性控制理论的思想精华。其核心是把系统的未建模动态和未知外扰作用都归结于对系统的“总扰动”而进行估计并给予补偿。自抗扰控制器包括:跟踪微分器(TD),其作用是安排过渡过程并给出过程的微分信号;扩张状态观测器(ESO),其作用是给出对象状态变量估计值及系统模型和外扰实时总和作用的估计值,实时估计值的补偿作用使被控对象化为“积分器串联型”;利用非线性状态误差反馈(NLSEF)对被化成“积分器串联型”的对象进行控制。
在实际工程应用中,较多受控对象具有2阶系统特性,给系统分析及控制器设计带来极大方便。于是,考虑如下的2阶系统

可设计2阶ADRC控制器结构如图1所示。其中:v为输入信号;v1为v的过渡过程;v2为v1的微分信号;u为控制量;w为干扰;y为系统输出。

图12阶ADRC结构
2ADRC的简捷设计
根据ADRC控制算法实现,即式(2)~(4),其中需要整定的参数较多,而且这些参数的物理意义不直观。目前参数的整定主要还是依靠经验,其工程物理意义不明显,不利于工程人员理解和应用。这也大大约束了ADRC的工程应用推广。
针对上述问题,总结了一些简洁的设计方法,旨在减少设计参数、简化设计步骤、增强设计参数的工程直观性,以方便实际应用。
2.1 TD的简捷设计
r一般根据系统机构响应速度限制设定,而h可根据期望过渡过程时间t0和系统采样时间h0确定。
假设h=h0,且TD跟踪幅值为d的阶跃信号,且v¨1(t)≡r,v1(0)=0,则根据TD过渡过程安排的特点,有r(t0.5)2/2=d/2,则t0.5即为过渡过程时间的一半。于是过渡过程时间为
将云服务提供商履行SLA的程度,作为信任模型的评估证据,更准确地表达CSP的可信性。本文评估云服务提供商信任过程中检测这些指标是否得到了切实的保证,并且利用马尔科夫模型预测CSP不能保证这些指标的可能性,提前对CSP进行调整。如果CSP及时地进行了调整,则认为CSP履行了其承诺,则信任值高,反之就低。

继而有

由此,TD可以通过参数d和t0来设定。d主要反映系统输入v的增量幅度特性。
2.2 ESO的简捷设计
α1、α2可取α1=0.5,α2=0.25[9];参数bo可以取对象系数b;参数δo1、δo2反映控制精度,一般取值δi=δo=0.1。
而对于参数βo1、βo2、βo3,考虑通过线性观测器设计方法确定[12]:β1=3ωo,β2=3ωo2,β3=3ωo3,其中ωo是观测器的带宽。
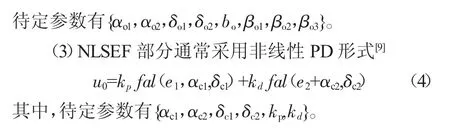
2.3 NLSEF的简捷设计
通常取值α1=0.5,α2=1.5[11]。参数δ1、δ2的选取原则同扩张状态下观测器的一样[11],可取δ1=δ2=δc=0.1。
由于ESO可以对系统模型和外扰动实时总和作用获得实时估计值z3,通过该值的补偿可以使被控对象化为“积分串联型”。即对于2阶系统,可通过输入补偿u(t)=u0(t)-z3(t)/bo,可将2阶对象化为积分串联型x¨=bou0,即其传递函数形式为Gp=bo/s2。一方面,取值b0=b;另一方面,考虑NLSEF采用PD控制器形式Gc=kp+kds。控制输入为u0=kp(r-z1)+kd(r˙-z2)。
通过ESO观测有z1≈y,z2≈y˙。于是,控制系统结构近似如图2所示。
继而所得系统闭环传递函数为

为简便起见,取值kp=ωc2/bo,kd=2ξωc/bo。
由此,ADRC的待定参数减少为 d、t0、ωc和 ωo,这4个参数具有更直观的物理意义,便于工程人员理解应用;上述设计过程简捷,也便于实际应用。
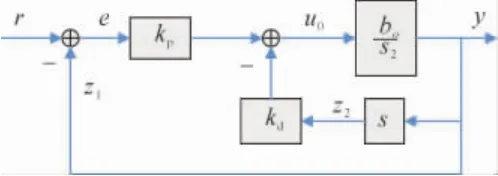
图2 近似系统结构
3 涡扇发动机ADRC控制器简捷设计
建立发动机转速回路ADRC控制仿真模型,其结构如图3所示。其中:pNl为发动机低压转子转速百分数;pNrl为期望转速百分数;Wf为发动机燃油流量。“EngComp”模块表示涡扇发动机模型,是该型涡扇发动机的部件级非线性模型。

图3 发动机ADRC控制结构
为方便后续设计,做一定简化:发动机供油量执行机构可用1阶惯性环节近似;因发动机部件级非线性模型在一定稳态附近,通过线性化,可得到该稳定工况下的线性模型
此时,实际被控对象应为供油量机构与发动机串联,且传递函数形式为

近似为1个2阶系统形式。继而可根据式(6),采用前面所给简捷设计方法为发动机设计2阶ADRC控制器

式中:h0=0.01,为系统采样时间;d=0.05,为控制输入信号阶跃幅值;由式(4),该ADRC所设计的过渡过程时间t0=1 s。
4 控制仿真
分别利用ADRC和PID控制器,根据发动机非线性模型,对发动机转速控制进行仿真。其中PID控制器参数为Kp=0.4568、Ki=1.0055、Kd=0.0356。仿真所得部分参量响应比较如图4所示。
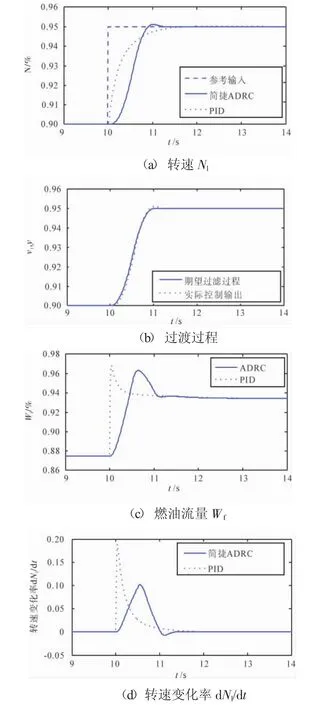
图4ADRC与PID控制比较
(1)如图4(a)、(c)所示,ADRC所得输出基本上能够沿TD所安排的过渡过程变化,过渡过程时间约1 s,表明TD安排过渡过程作用有效,达到预期目的。尽管有小量超调,但可以通过进一步调整控制参数来改善。
(2)如图4(c)所示,ADRC所得变化速率比PID的小,尤其PID控制所得有1个较大幅度的陡增,不利于供油机构有效动作。
(3)如图4(d)所示,ADRC所得转速变化率明显比PID的小,且没有明显的陡增陡减现象。一方面,表明通过TD限制响应速度作用有效;另一方面,没有的陡增陡减,有利于系统的稳定工作,并易于兼顾系统各部件(如供油机构)的响应快速性要求。
综上分析,ADRC能够有效提高响应速度,减小超调量,更好地“照顾”到实际系统响应承受能力,降低了对供油机构动作速度的要求,并给出良好的综合控制性能。
5 结束语
本文首先针对ADRC控制器整定参数较多且各参数物理意义不直观而不便于工程实际应用的问题,通过适当假设简化,给出了1个简捷的设计方法。该方法待整定参数包括过期望过渡过程时间、观测器带宽和状态反馈系统的带宽。然后将该方法应用于某型涡扇发动机转速控制器设计中。最后,通过仿真,并与PID控制器比较,表明了利用ADRC控制器可获得更满意的动态品质。
[1]Astrom K J,Hang C C,Persson P,et al.Towards intelligent PID control[J].Automatic,1992,28(1):1-9.
[2]陶永华.新型PID控制及其应用[M].2版.北京:机械工业出版社,2002:1-10.
[3]孙健国.现代航空发动机多变量控制系统[M].北京:北京航空航天大学出版社,2005:3-10.
[4]樊思齐,徐芸华.航空推进系统控制[M].西安:西北工业大学出版社,1995:40-50.
[5]石伟,韩树军,丁水汀.微型涡喷发动机控制算法研究[J].航空发动机,2008,34(8):46-48.
[6]潘慕绚,黄金泉.基于相似原理的航空发动机自适应PID控制研究[J].推进技术,2003,24(5):429-431.
[7]姚华,鲍亮亮,孙健国.基于神经网络的航空发动机全包线PID控制[J].南京航空航天大学学报,2007,39(2):236-239.
[8]韩京清.自抗扰控制器及其应用 [J].控制与决策,1998(1):20-23.
[9]韩京清.从PID技术到“自抗扰控制”技术 [J].控制工程,2002,9(3):13-18.
[10]韩京清.自抗扰控制技术[J].前沿科学,2007,1(1):24-31.
[11]张立明.自抗扰控制技术在AUV航向控制中的应用[D].哈尔滨:哈尔滨工程大学,2009.
[12]Gao Zhiqiang.Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference,Denver,Colorado,2003.
Simple Design and Application of Auto Disturbance Rejection Controller,for Aeroengine
LI Shu-qing,ZHANG Sheng-xiu,LIU Yi-nan,ZHOU Shuai-wei
(The Second Artillery Engineering College,Xi'an 710025,China)
Aiming at aeroengine high non-linear characteristics,the application study of Auto Disturbance Rejection Controller(ADRC)was conducted in the aeroengine control system.Firstly,the simple ADRC was obtained in the engineering application view,thereby the change parameters were reduced to enhance the physical intuitive of design parameters and facilitate the design.Secondly,the method was applicated to a turbofan engine controller design.Then,the simulation results show that ADRC is more effective than PID controller.
auto disturbance rejection controlle(rADRC);PID controller;design method;aeroengine
��,男,在读博士研究生研究方向为航空发动机建模与控制等。
2011-11-24
猜你喜欢
趣味(作文与阅读)(2021年11期)2021-03-09 06:37:12
趣味(语文)(2021年11期)2021-03-09 03:11:36
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
IT时代周刊(2015年7期)2015-11-11 05:49:55
电测与仪表(2015年19期)2015-04-09 11:32:56
航空世界(2014年6期)2014-04-14 00:50:40
电测与仪表(2014年11期)2014-04-04 09:21:36
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17