
基于BP_Adaboost的目标跟踪算法应用研究
2012-07-04 08:03:08刘艳丽陈跃东
河北工程大学学报(自然科学版) 2012年3期
刘艳丽,陈跃东
(安徽工程大学,安徽省电气传动与控制重点实验室,安徽 芜湖241000)
针对存在的问题,文章提出将BP神经网络与Adaboost算法相结合,就是把BP网络当作弱分类器,反复训练BP网络用来预测样本的输出,BP_Adaboost模型即用Adaboost算法把多个BP网络的弱分类器组合成强分类器。提取目标的局部特征作为神经网络输入特征向量,可以有效避免局部遮挡及目标姿态变化带来的影响,大大提高跟踪算法的鲁棒性。
1 BP神经网络跟踪模型
1.1 运动目标局部特征提取
目标跟踪常用到的特征有:颜色、纹理、灰度和边缘特征等。这些特征表述结构简单,提取方便快速,可以满足目标跟踪的要求。但在目标所在环境复杂的时候,提取的特征易受到干扰,对跟踪准确性影响很大。为了解决这个问题文章提出依靠提取目标局部特征来提高跟踪性能。局部特征的优点在于它具有很多不变性(旋转、仿射、尺度和灰度不变性等)和鲁棒性(局部特征对图像噪声、压缩、模糊等不敏感)。角点是图像亮度发生剧烈变化的点,它是一种典型的局部特征。
Harris算子是基于图像几何特征的检测算法,它定义角点为与自身邻域亮度相差较大的点,是一种常用的特征角点检测算子。它通过计算图像中每个点的兴趣值,在邻域中找出局部最大值点作为图像中的角点,操作计算简单。Harris检测算子在图像纹理细节充足的地方可提取大量有用的特征角点,所以Harris算子在提取特征角点上是合理均匀的。Harris使用微分算子对图像进行微分运算,而微分运算对图像密度的拉升或收缩和亮度的抬高或下降不敏感,所以即使图像发生对比度及亮度的变化也不会影响Harris算子的稳定性。
本文采用Harris算子提取运动目标的特征角点,通过计算特征角点7×7邻域的矩特征建立特征角点的向量,得到一个角点的7维向量,作为BP网络输入特征。
1.2 BP网络分类器的设计
BP网络是一种典型的多层前馈网络,它的特点是信号向前传递和误差的反向传递。BP网络实质上实现了一个从输入到输出的映射功能,而数学理论已证明它具有实现任何复杂非线性映射的功能。BP网络的映射功能是把若干个简单非线性函数复合在一起来完成的,这样通过几次复合就可以表达极为复杂的非线性函数关系,进而解决复杂的实际问题。在基于BP神经网络的运动跟踪系统中,BP神经网络执行分类器的作用。BP网络分类器包含训练和检测两个阶段,如图1所示。

图1中上半部分为训练阶段,下半部分是检测阶段,训练阶段中系统根据己知类别的训练样本制定出判别函数及规则,分类阶段中用训练好的BP网络分类器进行分类。
由于BP神经网络自身存在的局限性,在对视频图像中运动目标进行跟踪时,BP神经网络跟踪的准确性对提取得到的运动目标特征存在很大的依赖性。如果运动目标出现遮挡或姿态变化,会严重影响BP神经网络匹配的准确性。所以如何提高神经网络性能,使其更优化是提高目标检测跟踪性能的一种方法。
2 BP_Adaboost跟踪模型
2.1 算法思路
先给出样本空间(x,y)和弱学习方法,从给出的样本空间里找出m组训练的数据,使每一组训练数据权重都为1/m。然后使用弱学习方法进行T次迭代运算,并更新训练数据的权重分布按照每次运算的分类结果,对于分类失败的个体训练样本赋予较大的权重,在下一次的迭代运算中更关注失败的训练个体。通过T次迭代运算弱分类器得到分类函数f1,f2,…fT,给每一个分类函数都赋予一个权重,分类结果好的函数,其对应的权重越大。T次迭代运算后,最终的强分类的函数F可由弱分类的函数通过加权得到。BP_Adaboost模型就是把BP网络当作弱分类器,反复训练BP网络用来预测样本的输出,即用Adaboost算法把多个BP网络的弱分类器组合成强分类器。
目前药材市场上销售的雷公藤是否去皮难以判别,特别在大规模生产中,性状鉴别存在一定的片面性,无法有效地控制工艺水准。甚至有文献研究显示,基于雷公藤皮部中的雷公藤甲素等成分含量更高[8],为提高雷公藤多苷提取率,存在着部分厂商有意选取去皮不完全的雷公藤进行投料的情况。这一做法隐蔽性强,虽可提高有效成分的提取率,但存在过高产生未知副作用的风险,给后期监管带来困难。在当前强调安全用药与疗效并重的背景下,如何在投料前快速判别雷公藤去皮减毒工艺的水平,有效监管违规投料行为,值得行业关注和研究。
2.2 BP_Adaboost跟踪算法
基于BP_Adaboost的运动目标跟踪算法的步骤如下:
网络的初始化和数据的选择。从所给样本空间中选择m组训练数据样本,并初始化样本的权值分布Dt(i)=1/m,由样本的输入和输出维数可确定网络的结构,初始化BP网络的阈值和权值。
弱分类器的预测。在训练弱分类器时,用样本训练BP网络并预测训练样本的输出,得到了预测序列g(t)的预测误差和et

式中y-期望的分类结果;g(t)-预测的分类结果。
预测权重的计算。由预测序列g(t)的预测误差et计算权重at。计算公式为

测试样本的权重调整。由预测序列的权重at调整下一轮的训练数据样本的权重,公式为
得到强分类函数。T轮训练后可得到T组弱分类函数f(gt,at),根据T组弱分类函数f(gt,at)可组合得到强分类函数h(x)。

3 仿真实验
根据Adaboost和BP神经网络原理,在MatlabR2011a环境下,编程实现基于BP_Adaboost算法的目标跟踪。采用Harris算子提取运动目标的特征角点,计算特征角点7×7邻域的矩特征建立特征角点的向量,得到一个角点的7维向量,从而构造出一个7维输入1维输出的BP神经网络。
实验采用结构为7-15-1的BP神经网络,BP网络的训练次数、训练目标、学习率的参数设置分别为100、0.000 01和0.01。BP_Adaboost共训练产成10个BP网络的弱分类器,组成强分类器对运动目标进行跟踪。
为了验证算法的有效性,文章对不同环境条件下两组视频中的运动目标采用BP_Adaboost算法进行跟踪,拍摄了card.avi和book.avi两组视频图像序列,它们的尺寸都为320×240。
用训练好的BP神经网络模型和BP_Adaboost模型分别对两组视频中的运动目标进行跟踪,两种模型分类误差如图2所示。
从图2中可以看出,采用强分类器后,分类误差明显低于BP弱分类器的分类误差,说明BP_Adaboost模型具有良好的分类效果。表1给出了两种跟踪模型的实验数据。从表中的数据比较分析可以看出引入Adaboost算法以后,通过反复训练BP网络弱分类器,并根据训练样本分类结果调整训练样本权重,最终得出一系列弱分类器及其权重并组成的强分类器,使得分类器的分类正确率提高了。说明基于BP_Adaboost模型的跟踪算法能够准确的跟踪目标。
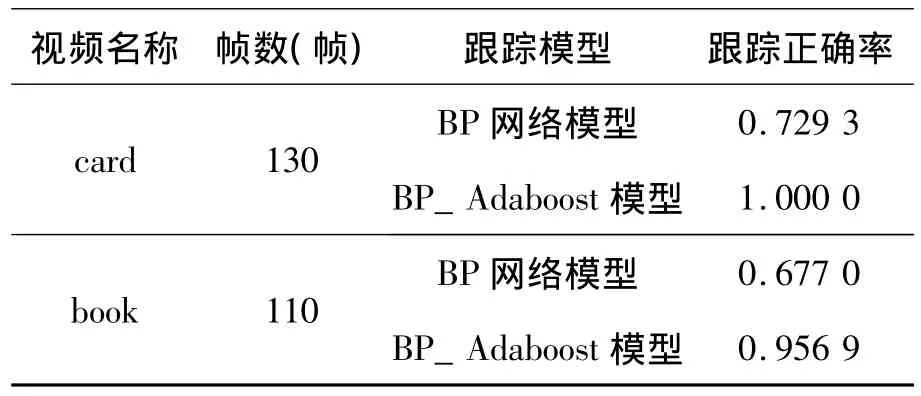
表1 两种模型的分类正确率比较Tab.1 The comparison of the classification correctness of the two models

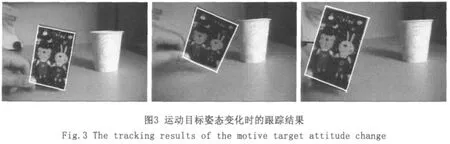

在第一组实验神经网络的训练过程中,选取130帧视频序列中的前10帧作为输入训练样本集,并用其中一帧建立BP网络弱分类器的输入特征向量。用训练好的BP_Adaboost网络对其余120帧视频图像序列中运动目标进行跟踪,得到的跟踪结果如图3所示。
视频中运动目标是一张卡通图片,当运动目标发生了旋转和大小缩放等姿态变化时,基于BP_Adaboost和目标局部特征的跟踪算法仍能够准确跟踪目标。表明基于BP_Adaboost的目标跟踪算法提高了跟踪系统的鲁棒性。
第二组实验验证的是遮挡情况下的跟踪性能。第二组实验视频为110帧,选取前10帧作为训练样本集,用训练好的BP_Adaboost模型对视频中运动目标进行跟踪,得到的跟踪结果如图4所示。
第二组视频中的运动目标为红色小册子,白色框是跟踪册子的结果。由图可知,即使目标部分遮挡时,文章的算法仍能成功跟踪到运动目标,且跟踪的轮廓没有发生形变,当遮挡过大运动目标的大部分特征角点不能检测到时则不能成功跟踪目标。但如果目标再次出现在场景中时,它就能被成功的跟踪。所以基于BP_Adaboost和目标局部特征的跟踪算法对于目标局部遮挡及姿态变化的情况都能有效跟踪,很大提高了跟踪算法的鲁棒性。
4 结语
从神经网络算法的选择和目标特征提取两个方面考虑提高目标检测的正确率。在神经网络算法的选择中将BP神经网络与Adaboost算法相结合即用Adaboost算法把多个BP网络的弱分类器组合成强分类器;在目标特征提取中采用Harris算子提取运动目标的特征角点,作为BP网络输入特征。从文中实验结果可知,该算法能有效避免局部遮挡及目标姿态变化带来的影响,大大提高跟踪算法的鲁棒性。
[1]HARITAOGLU,HARWOOD D,DAVIS L.W4:Realtime surveillance of people and their activities[J].IEEE Transactions of Pattern Analysis and Machine Intelligence,2000,22(8):809 -830.
[2]COIFMAN B,BEYMER D,MCLAUCHLAN P,et al.A real-time computer vision system for vehicle tracking and traffic surveillance[J].Tansportation Research Part C,1998,6(4):271 -288.
[3]张 禹,马驷良,张忠波,等.基于AdaBoost算法与神经网络的快速虹膜检测与定位算法[J].吉林大学学报,2006:44(2),233 -236.
[4]金花,曲俊华.基于小波神经网络的目标跟踪的研究[J].微计算机信息,2009(24):129-130.
[5]PAN FENG,WANG XUANYIN,XIANG GUIXIAN,et al.A kind of new tracking algorithm of movement object[J].Optics Engineering,2005,32(l):43 -46.
[6] TAI J,TSANG S,LIN C,et al.Real - time image tracking for automatic traffic monitoring and enforcement application[J].Imageand Vision Computing,2004,22(6):485-501.
猜你喜欢
电子制作(2019年19期)2019-11-23 08:42:00
电子技术与软件工程(2018年10期)2018-07-16 12:04:18
电子测试(2018年1期)2018-04-18 11:52:35
电子科技(2016年12期)2016-12-26 02:25:49
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
系统工程与电子技术(2016年4期)2016-08-24 07:46:28
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
海军航空大学学报(2015年4期)2015-02-27 13:45:47
