
基于DSP的船舶火灾报警系统
2012-07-04 02:46:26范大鸣
船电技术 2012年6期
范大鸣
(渤海船舶职业学院,辽宁 葫芦岛125005)
0 引言
船舶安装火灾报警系统的目的,就是及时发现火灾,及时采取灭火、疏散等措施,最大限度地降低因火灾带来的损失。船舶火灾报警系统是由控制装置、火灾报警装置、以及具有其它辅助功能装置组成的。在火灾初期它将燃烧产生的烟雾、热量、火焰等物理量,通过火灾探测器变成电信号,传输到火灾报警控制器进行报警,同时显示出火灾发生的部位、时间等,使人们能够及时发现火灾,并及时采取有效措施,扑灭初期火灾,最大限度的减少因火灾造成的生命和财产的损失,是人们与火灾做斗争的有力工具。
1 船舶火灾报警系统的设计
1.1 系统构成
系统基本结构如图 1所示[1],系统各监控节点由TI公司TMS320F2812控制,系统采用CAN总线将各节点连成一个火灾报警系统。
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。CAN总线采用多主串行通信协议,具有高级别的安全性,可以有效地支持分布式适时控制,通信速度最高达 1Mbps。较之目前许多 RS-485基于R线构建的分布式控制系统而言,基于CAN总线的分布式控制系统在以下方面具有明显的优越性:①网络各节点之间的数据通信实时性强;②开发周期短;③已形成国际标准的现场协议;④最有前途的现场总线之一。
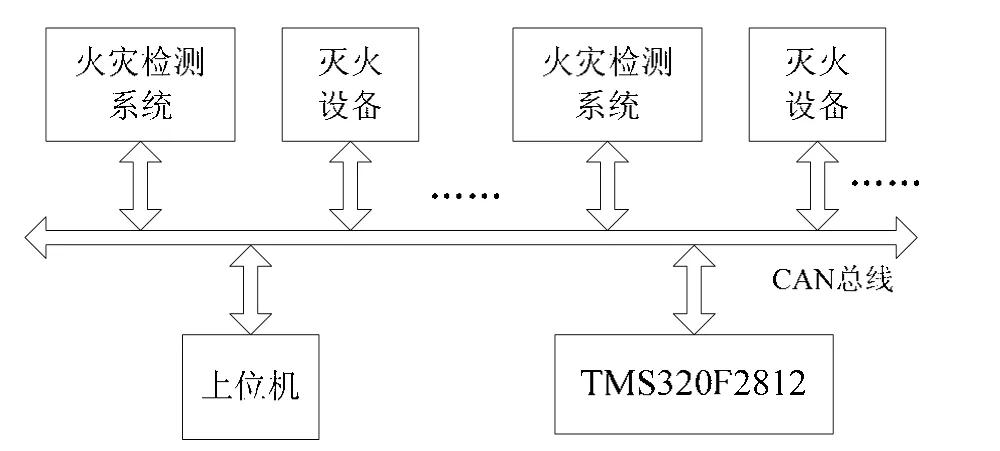
图1 系统结构图
1.2 TMS320F2812介绍
TMS320F2812[2]是 TI公司新推出的数字信号处理器,器件上集成了多种先进的外设,具有更高的运算的精度(32位)和系统的处理能力(达到150MIPS)。该处理器集成 128KB的Flash存储器,4KB的引导ROM,数学运算表以及2KB的 OTP ROM,从而大大改善了应用的灵活性。16通道高性能12位ADC单元提供了两个采用保持电路,可以实现双通道信号同步采用。
1.3 CAN总线
TMS320F2812内带CAN控制器,使整个电路的外围设计简单化,可靠性也得到提高。由于CAN总线具有传输距离较长,数据的传输率高,CAN总线具有线间干扰小、抗干扰能力强的优点。DSP的CANRX和CANTX先通过高速光耦6N137与TJA1050连接,实现了总线的电气隔离;采用了 TJA1050作为驱动器是完全符合ISO11898标准;高速率最高达 1Mbit/s;电磁抗干扰性能好;不上电的节点不会对总线造成扰动;至少可以连接120个节点。CAN通信接口电路如图2所示。
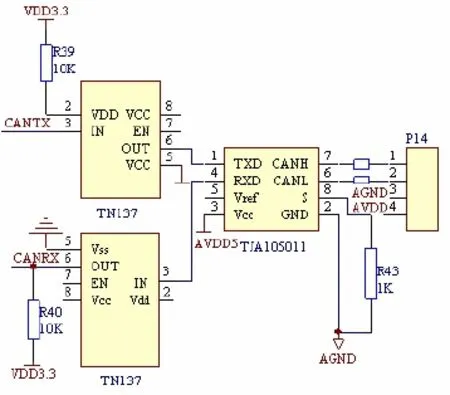
图2 CAN通信接口电路
1.4 火灾信息采集的实现
为了提高船舶火灾报警系统探测的准确度,系统用了感烟探测器、感温探测器和火焰探测器,并且不再是简单的依靠火灾探测器内部电路设置的阀值来确定是否发出火灾报警,而是由探测器把监视场所的两个火灾数据信息通过 CAN总线实时地传输给DSP,根据DSP内部智能算法进行处理后,作用于灭火设备[3]。
2 软件设计
软件设计部分主要是各种控制程序和数据采集,以及CAN的通信程序[4]。DSP的初始化程序流程图,如图3所示。主要设置CAN控制器的通信参数。需要初始化的寄存器主要包括:模式寄存器、时钟分频寄存器、滤波寄存器、中线定时寄存器、输出控制寄存器。
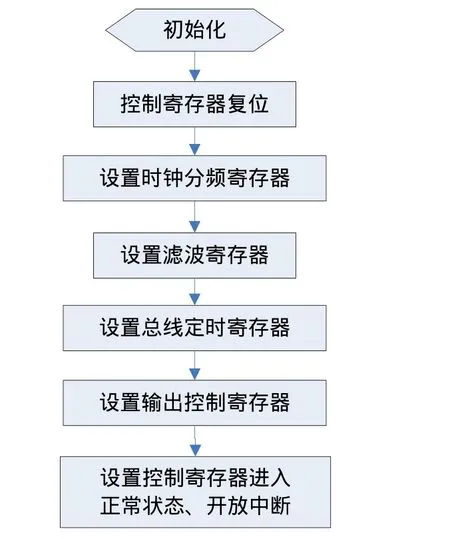
图3 DSP初始化
3 结束语
船舶火灾报警系统应用DSP,实现了多种信息量的采集处理;在数据传输上采用CAN,增强通信的可靠性并且提高了传输距离及传输速度;加强了系统的抗干扰性,提高了系统对环境的适应能力;减少了火灾的误报和漏报。整套系统电路设计合理,系统功能完善,性能可靠,满足船舶海上长期使用的环境条件,同时也具有较高的性价比。
[1]李业兴, 康晓恩, 邓志杰, 田建文.基于DSP和CAN总线的数据采集与处理系统. 兰州交通大学学报(自然科学版), 2007, (2).
[2]刘和平等. TMS320C28x系列DSP指令和编程指南.北京:清华大学出版社, 2005, (3).
[3]许焰, 汪劼, 朱善安. 基于 CAN总线的数据采集和控制系统.机电工程, 2007, (2).
[4]吴恒, 夏立. 基于CAN总线的船舶火灾报警系统的设计.青岛大学学报, 2004, (3).
猜你喜欢
计算机应用(2020年5期)2020-06-07 07:06:44
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年12期)2019-01-06 03:38:45
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
单片机与嵌入式系统应用(2017年7期)2017-07-31 21:57:23
电子设计工程(2015年8期)2015-02-27 12:05:26
太空探索(2014年9期)2014-07-10 13:06:30
河南科技(2014年16期)2014-02-27 14:13:22
