
基于SoftPLC的船舶主机遥控物理仿真模拟器设计
2012-07-03 06:38:56郭家建林贻慧
船电技术 2012年3期
郭家建 林贻慧
(福建船政交通职业学院船政学院,福州350007)
0 引言
自动化技术、计算机技术和通信技术在船舶驾驶中的广泛使用,使船舶自动化经历了机舱集中控制、无人值班机舱、一台大型计算机集中控制、微机监测系统和微机分布式控制等发展阶段。这对轮机管理人员的技术要求越来越高,必须对学生和船员进行训练[1]。
模拟器以一艘 1600 TEU集装箱船使用的Autochief IV 主机控制系统作为原型,采用SoftPLC实现对船舶主机遥控物理仿真模拟器的控制。利用组态软件PIMS作为上位机开发平台,进行人机交互界面的设计,使其功能的更加完善;通过数据库技术实现数据的存储及应用。与传统的轮机模拟器相比,本系统具有以下优点:
1)采用PLC 进行现场控制,现场数据的响应速度加快,运行更稳定;
2)操纵过程的数据全部储存在数据服务器中,可供师生查询及评判等;
3)船舶主机遥控物理仿真模拟器既可与上位机系统相连运行,也可自成体系单独运行。
1 船舶主机遥控物理仿真模拟器的组成
船舶主机遥控物理仿真模拟器主要硬件包括PC 机、SoftPLC控制器、仪器仪表、指示灯、控制开关等。SoftPLC采用工业以太网 Modbus TCP/IP 方式和PC 机进行数据通信。SoftPLC对现场数据进行处理,并根据设定程序完成各种控制动作。系统框图如图1 所示。
SoftPLC作为下位机,可以完成数据的采集和数据的处理。利用以太网来进行数据的传输,具有较高的传输速度及较好的可靠性和实时性。SoftPLC是整个系统的控制核心。整个系统中所有的信号数据都会传递给 SoftPLC,并且通过与PC机进行实时通讯,可以实现在上位机上进行相关的数据显示和数据处理等等。
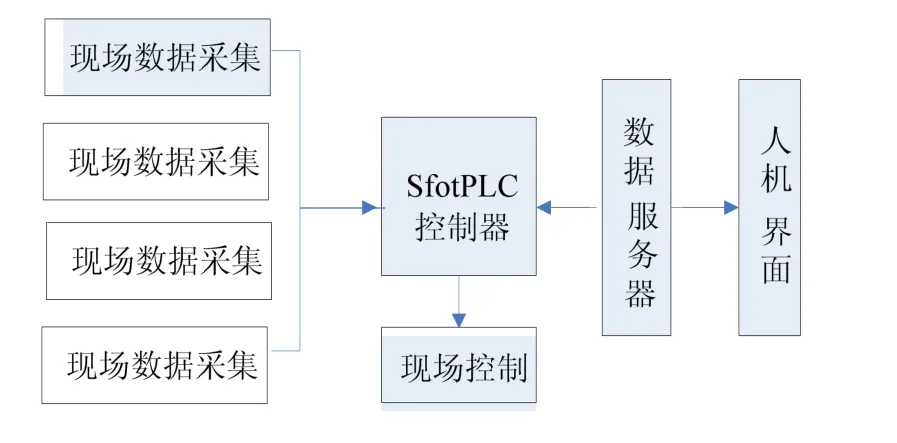
图1 系统框图
船舶主机遥控物理仿真模拟器软件设计包括SoftPLC梯形图编辑、人机交互界面的设计和组态软件中脚本程序的编写。通过SoftPLC梯形图的编辑,可以完成系统所要求的基本功能。而在组态软件中的设计,可以使系统的功能更加完善,比如:数据的储存、故障的设置等等。
2 SoftPLC控制系统的设计
2.1 SoftPLC简介
SoftPLC是SoftPLC公司的产品,是运行在工业 PC上的一个实时多任务控制内核。它既有所有“硬”PLC的特性,又具有自己的特性,即开放结构系统。SoftPLC系列控制器是以嵌入式CPU为核心的实时控制器,符合 IEC61131-3标准,可以构建成开放式的PLC控制系统。用户可把 SoftPLC系列的控制器作为专用的运行控制器。利用 TDNG组态软件平台,可以实现常规PLC的全部功能。用户也可使用MODBUS通讯协议,连接RS-232C通信接口,把图形操作面板和SoftPLC系列的CPU连接起来。
2.2 SoftPLC程序设计
1) SoftPLC配置
根据系统的要求,对SoftPLC的I/O地址进行分配。可以通过两种方式来设置I/O地址:一是,使用“I/O MAP editor for SoftPLC”程序来设置I/O地址;二是,通过 FTP将 SPLC-2内C:SOFTPLCRUN目录下的FAMA.ISO文件删除后重新上电,系统会自动生成新的I/O映射表。
2)梯形图设计
船舶主机遥控物理仿真模拟器的功能比较复杂,涉及的器件繁多。为了实现系统的各种逻辑功能,必须对梯形图进行合理的设计。以集控室和驾驶室之间主车钟的校对控制为例,在备车状态下进行主车钟的校对,驾驶室主机控制台上把主车钟手柄推从“STOP”位至其他不同的车钟档位,发出声光报警。然后,集控室主机控制台上将主车钟手柄推至对应的档位进行应答,警报消除。在各档车令校对正常后,在驾驶室内将主车钟手柄放在“STOP”位,集控室内也将主车钟拉回“STOP”位。集控室和驾驶室之间主车钟的校对控制程序流程图如图2所示。
3 组态监控的设计过程
3.1 组态软件PIMS简介
船舶主机遥控物理仿真模拟器选择组态软件PIMS作为开发平台。PIMS 组态软件融合了先进的数据接口技术,先进的通讯技术,现场总线技术以及网络技术。组态软件PIMS具有以下功能特点:
1)实时多任务:例如,数据处理与算法实现、图形显示及人机对话、实时数据的存储、检索管理、实时通信等多个任务在同一台计算机上同时运行。
2)强大的画面显示组态功能:组态软件PIMS提供给用户丰富的作图工具。
3)提供了良好的人机交互界面:它可提供各种图形工具、参数组态界面等,使系统功能易于实现,从而加快了系统开发速度。
4)丰富的功能模块:提供丰富的控制功能库,满足用户的要求。
5)良好的开放性:拥有庞大的驱动程序库,支持多种不同的硬件设备和通讯协议。
6)实时数据库功能:实时数据库是PIMS系统的数据处理核心,用作管理系统的数据处理,同时为PIMS的其它组件提供数据服务。
3.2 组态软件功能设计
1)构造数据库变量
为了实现逻辑控制的功能,在组态软件中必须进行程序的编写。而在编写程序之前必须定义程序中用到的变量,根据变量的不同性质可以定义为数据库变量、中间变量等。变量的数据是用来描述工控对象的状态[2]。组态软件 PIMS拥有自带的点组态数据库,将所有的I/O变量在点组态数据库中进行定义。这些 I/O变量与下位机SoftPLC对应的变量相关联,可以实现数据的读取和写入,即可以在上位机上实现系统的监控[3]。
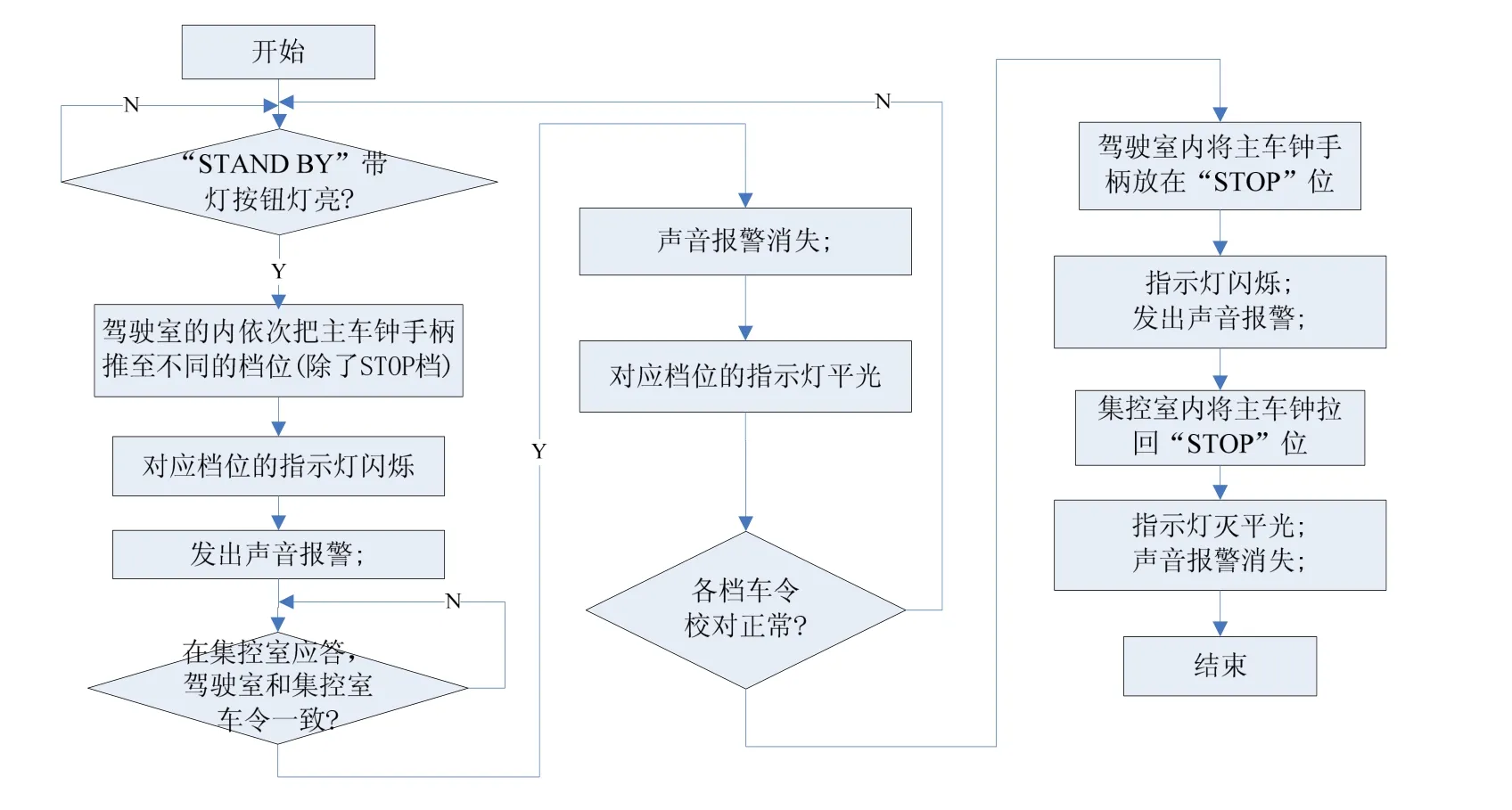
图2 集控室和驾驶室之间主车钟的校对控制程序流程图
2)设计人机界面
人机界面是人机交互的平台,利用 PIMS软件来创建友好的人机交互界面。首先进行画面组态的设计。在组态软件PIMS中绘制出逼真的画面。这些画面生动、形象,使整个系统操作更加人性化。例如:安保系统的监控画面如图3所示。
其次,建立动画连接。画面组态是一些静止的画面,要实现动态效果必须进行动画连接。
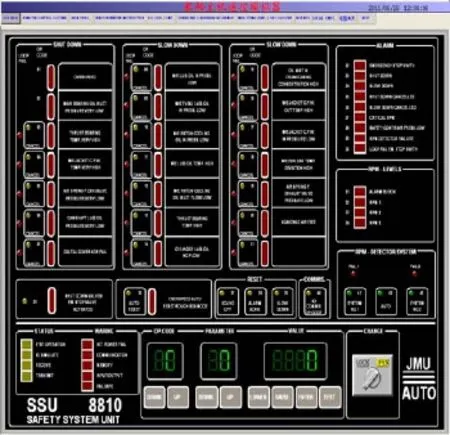
图3 安保系统监控画面
3) 与SoftPLC进行数据通讯
要实现上位机对下位机进行监控,就必须完成组态软件PIMS与SoftPLC之间的通讯。采用Modbus通用协议通讯方式,使用TCP/IP网络连接。在组态软件PIMS中定义I/O设备,即设置设备名称、设备地址、主机地址等等参数。将组态软件PIMS中定义的I/O变量与定义的I/O设备相关联,从而实现与SoftPLC之间的通讯。
4)运行和调试
对系统进行测试,检查其能否实现船舶主机遥控模拟器所需的各项功能。下位机在运行时,查看各个监控画面,确保每一个控件显示正确。在上位机上进行操作,看下位机能否按要求实现相关的动作。模拟器在组态软件PIMS和SoftPLC共同控制下,安全稳定的运行。
4 结束语
本套模拟器采用SoftPLC作为系统控制的核心,提高了控制系统的准确性和稳定性,同时也加快了系统的响应速度。学员可以在操纵面板上进行相关科目的练习,达到培训学员的目的;同时模拟器也可以作为对轮机员进行相关评估考核的设备。此外,组态软件PIMS的使用,提高了系统的开放性,使系统的功能更加完善。
[1]王锡淮, 肖健梅, 鲍敏中. 船舶主机遥控仿真系统实时多任务软件设计[J]. 船舶, 2002,(12).
[2]刘玉敏. 组态软件中先进控制算法的开发[D]. 大庆石油学院, 硕士学位论文, 2005.3
[3]艾辉. 基于组态软件的电梯监控系统的研究[J]. 中国电梯, 2005, (15).
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
汽车与驾驶维修(维修版)(2021年11期)2021-12-01 01:12:34
汽车与驾驶维修(维修版)(2021年11期)2021-11-24 13:03:45
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
时代汽车(2018年4期)2018-05-31 02:53:08
山东青年(2017年7期)2018-01-11 16:09:15
装备环境工程(2015年5期)2015-02-28 01:20:24
