
智能交流接触器零电流分断技术
2012-07-02 10:45鲍光海张培铭
电工技术学报 2012年5期
鲍光海 张培铭
(福州大学电气工程与自动化学院 福州 350108)
1 引言
交流接触器是主要的控制电器,其广泛应用于电气系统中。交流接触器智能化研究是智能电器研究的重要方向,也是智能电网建设的要求。国内外学者对交流接触器智能化做了大量工作[1-3]。
本文提出交流接触器智能化技术的主要特点是自适应接通过程动态优化控制、零电流分断(实际是微电弧能量分断)和通信功能。而交流接触器智能化技术的主要功能与技术难点是实现三相零电流分断。在零电流分断技术研究中,首开相触头分断时刻的准确性与稳定性是零电流分断的关键。但是零电流分断的实现具有相当大的难度,而采用三相触头不同步方案是解决智能交流接触器三相零电流分断问题的重要与有效手段[4]。然而该方案对电磁动作机构释放时间的稳定性与准确性要求较高。国外研究者提出采用3个小规格接触器组合代替传统大规格接触器的异步组合式智能控制方案,提高了接触器的AC3和AC4寿命[5-6]。该方案结构较复杂,而且同样对电磁动作机构释放时间的稳定性与准确性有较高要求。
电磁动作机构释放时间决定了动静触头的打开时刻,该时刻由两方面相互矛盾的因素决定:一是电流过零时触头之间的距离:如果触头打开时离电流过零点太近,电流过零时触头距离太小,触头间隙能承受恢复电压的能力太弱,弧隙容易击穿,造成电弧重燃;二是电弧的能量:触头打开时刻离电流过零点越远,电弧中积聚的能量越大,电弧越容易重燃。理论分析与大量实际测试表明,三相触头零电流分断的关键是首开相触头零电流分断的准确性与稳定性。
前期研究虽已取得较大进展,但尚未解决机构动作分散性对零电流分断稳定性与准确性影响的问题[7-9]。为此,本文提出大幅度缩短动作机构释放时间提高分断可靠性的思路,并采用ANSYS电磁场软件和基于遗传算法的人工鱼群算法对智能交流接触器动作电磁系统的动态过程进行优化设计计算,不仅保证智能交流接触器可靠与优化的接通过程,而且实现了机构准确与稳定释放的时间要求。该智能交流接触器零电流分断的可靠性得以大幅度提高。
2 基于遗传算法的人工鱼群算法
2.1 遗传算法
遗传算法(Genetic Algorithm,GA)是Holland教授首先提出来的一种仿生型进化算法。GA通过将当前群体中具有较高适应度的个体遗传给下一代,并且不断淘汰适应度低的个体,从而寻找出适应度最大的个体。其优点是:具有大范围全局搜索的能力,与问题领域无关;搜索从群体出发,具有潜在的并行性;可进行多值比较,鲁棒性强;搜索使用评价函数启发,过程简单;使用概率机制进行迭代,具有随机性,可扩展性,容易与其它算法结合。但是GA 算法对于系统中的反馈信息利用不够。
2.2 人工鱼群算法
人工鱼群算法(Artificial Fish Swarm Algorithm,AFSA)是模拟鱼群行为的一种基于动物自治体的优化方法,是集群智能思想的一个具体应用。它能很好地解决函数优化等问题。其主要特点是:只需比较目标函数值,对目标函数的性质要求不高;对初值的要求不高;对参数设定的要求不高;具备并行处理的能力,寻优速度较快;算法具备全局寻优的能力。虽然该算法优点较多,但也存在明显的不足,主要表现:当寻优的域较大或处于变化平坦的区域时,收敛于全局的最优解速度减慢、搜索性能劣化;算法一般在优化初期具有较快的收敛性,后期却收敛较慢[10,11]。
本文吸取遗传算法和人工鱼群算法的优点,将遗传算法和人工鱼群算法有机结合应用于智能交流接触器电磁系统优化计算中。
3 智能交流接触器优化设计
本文采用基于遗传算法的人工鱼群算法对交流接触器的电磁系统进行优化设计,在保证接触器可靠吸合的前提下,使接触器释放时间最短,为接触器可靠零电流分断打下基础。
3.1 智能交流接触器控制原理
采用三相触头不同步方案是解决智能交流接触器三相零电流分断问题的重要与有效手段。该方案控制原理框图如图1所示,通过单片机分别控制接触器启动阶段强激磁元件和低压保持元件。在该方案中只有保证首开相触头与非首开相触头的分断时刻差值在4.5~5ms之间,才能保证在首开相触头零电流分断时另外两相也在零电流分断[4]。
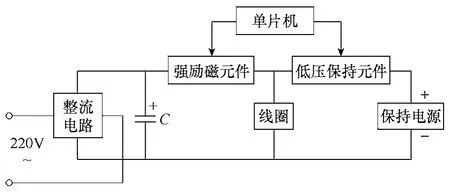
图1 控制原理框图Fig.1 Diagram of control principle
本文在大幅度缩短动作机构释放时间,解决首开相触头稳定可靠零电流分断问题的同时,出现了首开相触头与非首开相触头的分断时刻差值减小的问题,从而影响了两非首开相触头零电流分断的效果。为了保证时间差值满足要求,在整流电路输出端并联一个分断再励磁电容C。在接触器铁心分断后,利用电容上储存的能量给接触器线圈重新施加合适时间的强励磁信号,延缓非首开相触头的分断时刻,使首开相触头与非首开相触头的分断时刻差值满足要求。
分断控制时序如图2所示,从图中可以看出,在低压保持信号断电后t1,电容上的储能通过强励磁信号施加给接触器线圈t2时间。
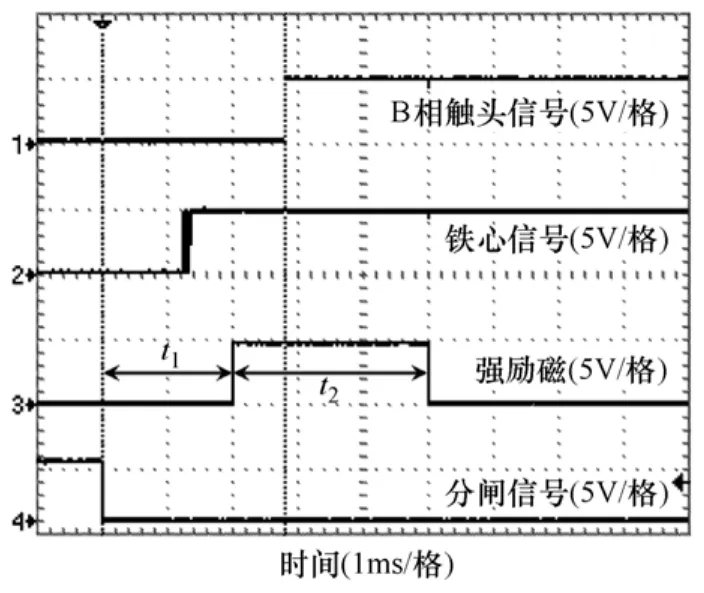
图2 分闸控制时序Fig.2 Control sequence of opening
3.2 确定优化变量
接触器是采用CJ40—100交流接触器进行改装而成,触头系统为三相不同步结构,也就是中间相即首开相触头开距大于非首开相触头开距。从而在结构上实现非首开相触头的分断时间比首开相触头滞后5ms左右,只要控制好首开相触头的分断时刻,就可以实现三相触头系统的零电流分断控制。
接触器的工作方式为直流起动、直流保持,并采用不加装分磁环的铁心。在适当提高反力特性的条件下,以合闸相角与吸合过程控制程序、电磁系统结构参数为优化变量,对其动态过程进行优化设计。
3.3 目标函数
为了得到最短的分断时间,将目标函数转化为在保证可靠吸合条件下接触器可动部件质量最小。
3.4 约束条件
约束条件是由接触器在工作中的技术要求和工作特性所决定的,主要由以下几个方面组成:
(1)电磁机构在初始状态下的吸力大于或等于初始反力

(2)运动部分在吸合过程无明显停滞现象

(3)所用的材料费用不能增加,也就是优化后线圈和铁心的总费用应低于(不高于)优化前

3.5 优化计算分析
根据遗传算法和人工鱼群优化算法的计算原理,编制智能交流接触器电磁系统优化计算程序,计算程序流程如图3所示。

图3 优化算法流程图Fig.3 Flow chart of optimization algorithm
由于人工鱼群算法对初值要求不高,根据约束条件和技术要求随机产生50条人工鱼群(50条人工鱼),同时设定迭代次数;各组人工鱼利用聚群行为和追尾行为进行寻优计算,当连续出现3次最优值没变化或变化很小,则进行遗传算法的选择、交叉、变异操作,防止出现局部最优值。这样既可以提高收敛速度又能保证全局搜索能力。计算结果见下表。

表 计算结果Tab. Calculation results
4 试验测试
为了验证优化计算算法的可行性和优化结果,本文对加工的样机进行包括吸合过程、首开相与非首开相触头分断时间及其稳定性、零电流分断等项目测试。
4.1 仿真计算验证测试
本文采用ANSYS有限元分析软件造表、Matlab仿真计算相结合的方法进行优化程序计算。接触器动态过程仿真计算是优化计算的重要组成部分,仿真计算结果直接影响优化结果。
为了验证仿真计算结果的正确性,本文采用以高速摄像机为基础的电磁电器动态测试装置,以非接触方式拍摄智能交流接触器的运动过程,从拍摄的图像信息中取出位移信号,并采用二进小波变换进行降噪处理,得到智能交流接触器的位移曲线[12-14]。采用霍尔电压电流互感器采集接触器线圈的电压电流信号,利用实测的曲线对仿真计算曲线进行验证。
图4是智能交流接触器在 0°合闸相角情况下吸合过程的仿真与实测曲线。图中 u1,Fx,Ff为仿真计算的电源电压、吸力、反力;u2,i,s为仿真计算的线圈电压、电流、位移;2u′,i′,s′为实际测量的线圈电压、电流、位移。从图可以看出,实际测量的线圈电压、线圈电流、铁心位移信号与仿真计算十分接近,可以利用仿真计算程序进行优化设计。

图4 吸合过程仿真与实测曲线Fig.4 Test and calculating waveforms in closing course
4.2 分断时间测试
在此之前,本课题组研制的接触器样机首开相触头(B相)在 3.4万次动作实验期间的分断时间(指关断直流保持激磁至触头打开时间)大约为3.98ms,但是其分断时间的变化范围下限小于3.36ms,上限大于4.48ms。可见其分断动作分散性非常大,其值超过1.12ms。根据大量测试所获结果表明,最佳触头打开时间大约是电流过零前 0.3~0.9ms之间,或者说机构释放时间的整个变化范围应在0.6ms内。因此上述机构将造成零电流分断的不稳定。
根据以上优化计算结果加工了样机,对样机分断动作时间进行稳定性的测试。该样机按 1200次/小时操作频率经过 3.5万次动作实验期间其首开相触头分断时间始终保持在2.72~2.92ms之间,即变化范围为0.22ms。测试结果表明,样机首开相触头的分断时间不仅大幅减小,而且该时间十分稳定,为实现零电流分断提供有利条件。
为了解决快速分断后造成首开相触头与非首开相触头的时间差无法保证的问题。本文在铁心分断后适当时刻,控制分断再激磁电容器接通并控制电容器接通时间,利用电容器上储存的能量为接触器电磁系统再次提供强激磁能量,延缓非首开相触头的分断时刻,使首开相触头与非首开相触头的分断时刻差值满足要求。空载条件下分断过程相关信号测试波形如图5所示。从图中可以看出,B相与A相之间相差4.68ms,B相与C相之间相差4.6ms,满足零电流分断三相触头的动作时间要求。
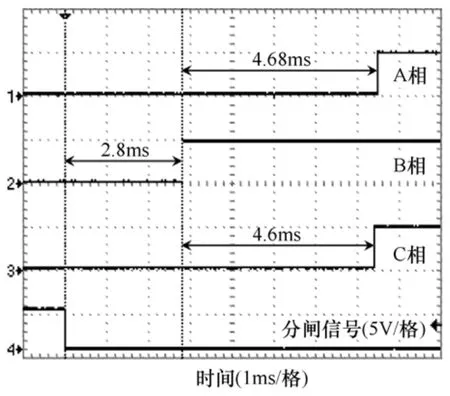
图5 分断时间测试波形Fig.5 Test waveforms of open time
4.3 零电流分断试验
优化后加工的样机在福州大学低压电器试验站进行AC4电寿命试验,试验过程的参数为:试验电压 380V,试验电流 600A,试验时操作频率为 600次/小时。图6是首开相触头(B相)在电流过零前0.4ms断开的试验波形。从图中可以看出:三相触头均在电流过零前很短的时间内打开,电弧在过零时开断,实现三相触头微电弧能量分断,而且经过多次试验表明,首开相触头动作时间十分稳定。

图6 零电流分断试验波形Fig.6 Experiment waveforms of zero-current breaking
5 结论
(1)零电流分断是智能交流接触器的关键技术,该技术的难点就是首开相触头分断的准确性与稳定性。然而由于电磁动作机构的分散性无法保证零电流分断的可靠性,因此解决该问题是交流接触器智能化技术研究的重点。
(2)本文提出动作机构快速释放的思路是解决机构分散性对首开相触头零电流分断准确性与稳定性影响的重要措施。该措施不仅解决了一台接触器自身机构分散性问题,同时解决了不同接触器机构的分散性问题,为智能交流接触器产品化奠定了很好的基础。
(3)首次应用基于遗传算法的人工鱼群优化算法的优势,对智能交流接触器的电磁动作机构进行优化设计,并结合电容能量再激磁的方案,在满足可靠与优化吸合的条件下大幅减小机构释放动作的分散性,实现了三相触头稳定的分断控制。
(4)本文研究将大幅提高智能交流接触器性能指标与运行可靠性,同时也提高了交流接触器智能化技术的研究水平。
[1]Wada Masayoshi,Yoshimoto Hiroshi,Kitaide Yujiro.Dynamic analysis and simulation of electromagnetic contactors with AC solenoids[J]. Proceedings of IEEE 28th Annu, 2002, 4: 2745-2751.
[2]llee R, Gerlach G. An FEM-based method for analysis of the dynamic behavior of AC contactors[J]. IEEE Transactions on Magnetics, 2000, 36(4): 1337-1340.
[3]纽春萍, 陈德桂, 李兴文, 等. 交流接触器触头弹跳的仿真及影响因素[J]. 电工技术学报, 2007,22(10): 85-90, 108.Niu Chunping, Chen Degui, Li Xingwen, et al.Simulation of contact bounce of AC contactor and study of its influence factors[J]. Transactions of China Electrotechnical Society, 2007, 22(10): 85-90,108.
[4]许志红, 张培铭. 智能交流接触器零电流分断控制技术[J]. 电工电能新技术, 2002, 21(4): 54-57.Xu Zhihong, Zhang Peiming. Zero current interrupt control of intelligent AC contactor[J]. Advanced Technology of Electrical Engineering and Energy,2002, 21(4): 54-57.
[5]Mechler P. Simulation of AC arc faults in aircraft electrical networks[C]. 21st International Conference on Electrical Contacts, 2002: 2902-295.
[6]陈德桂. 低压电器智能化的新技术[J]. 低压电器2008(1): 1-5, 33.Chen Degui. New intelligent technique of low voltage apparatus[J]. Low Voltage Apparatus, 2008 (1):1-5,33.
[7]许志红, 张培铭. 智能交流接触器全过程动态优化设计[J]. 中国电机工程学报, 2005, 26(3): 14-16.Xu Zhihong, Zhang Peiming. Dynamic optimal design of intelligent AC contactor in the whole course[J].Proceedings of the CSEE, 2005, 26(3): 14-16.
[8]许志红, 张培铭. 智能交流接触器动态吸合过程研究[J]. 中国电机工程学报, 2007, 27(18): 108-113.Xu Zhihong, Zhang Peiming. Research on dynamic closing course of intelligent AC contactor[J].Proceedings of the CSEE, 2007, 27(18): 108-113.
[9]郑昕, 许志红, 张培铭. 智能交流接触器自适应零电流分断的分析与实现[J]. 电工电能新技术, 2005,24(3): 77-80.Zheng Xin, Xu Zhihong, Zhang Peiming. Analysis and implemntation of zero-current breaking adaptive control in intelligent AC contactor[J]. Advanced Technology of Electrical Engineering and Energy,2005, 24(3): 77-80.
[10]陈德为, 张培铭. 基于人工鱼群算法的智能交流接触器虚拟样机优化设计[J]. 电工技术学报, 2011,26(2): 101-107.Chen Dewei, Zhang Peiming. Virtual prototype optimal design of intelligent AC contactors based on artificial fish-swarm algorithm[J]. Transactions of China Electrotechnical Society, 2011, 26(2): 101-107.
[11]李晓磊, 邵之江, 钱积新. 一种基于动物自治体的寻优模式: 鱼群算法[J]. 系统工程理论与实践,2002(11): 32-38.Li Xiaolei, Shao Zhijiang, Qian Jixin. An optimizing method based on autonomous animats: fish swarm algorithm[J]. Systems Engineering Theory & Practice,2002(11): 32-38.
[12]陈德为, 张培铭. 基于高速摄像机的智能交流接触器动态测试与分析技术[J]. 仪器仪表学报, 2010,31(4): 878-884.Chen Dewei, Zhang Peiming. High-speed camerabased intelligent AC contactor dynamic testing and analysis techniques[J]. Chinese Journal of Scientific Instrument, 2010, 31(4): 878-884.
[13]陈德为, 张培铭. 基于图像测量的智能交流接触器设计技术[J]. 中国电机工程学报, 2009, 29(36):108-112.Chen Dewei, Zhang Peiming. Image measuring- based intelligent AC contactor design technology [J].Proceedings of the CSEE, 2009, 29(36): 108-112.
[14]鲍光海, 张培铭. 基于高速摄像机的电磁电器动态特性测试及其图像处理的研究[J]. 南昌大学学报(工科版), 2009, 31(4): 376-380.Bao Guanghai, Zhang Peiming. The research of dynamic characteristics testing device for electromagnetic apparatus based on high speed camera and image processing[J]. Journal of Nanchang University(Engineering & Technology), 2009, 31(4): 376-380.
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年7期)2019-04-25
中外文摘(2017年19期)2017-10-10
电测与仪表(2016年3期)2016-04-12
电测与仪表(2016年20期)2016-04-11
电测与仪表(2015年12期)2015-04-09
河南城建学院学报(2015年4期)2015-02-27
电测与仪表(2014年15期)2014-04-04
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年8期)2014-04-04
