
数字控制400Hz三相四线高功率因数PWM整流器研究
2012-07-02 10:45石健将杨永飞王文杰张际海张建国
电工技术学报 2012年5期
石健将 杨永飞 王文杰 张际海 张建国
(1. 浙江大学电气工程学院 杭州 310027 2. 北京航空工程研究中心 北京 100076)
1 引言
随着电力电子技术的迅速发展和电力电子装置的广泛应用,传统二极管不控整流和晶闸管相控整流对电网的谐波污染越来越严重,大量的谐波电流不仅会降低电网的功率因数、增加输电线路的功率损耗,严重时还会使电网电压波形发生畸变,使用电设备发生故障甚至直接损坏。随着全控型高频开关器件和PWM调制技术的发展,高频PWM整流技术也得到迅速发展;高频 PWM整流器具有输入电流正弦化、输入功率因数可控、输出直流电压稳定可控和能量可双向流动等优点,真正地实现了“绿色电能变换”,满足了现代用电设备对电网的电能质量要求。另一方面,随着高压直流输电、可再生能源并网发电、新型UPS、能量存储、静止无功发生器(Static Idle Work Generator,SVG)等电力电子新技术的快速发展,中大功率高频PWM整流器的应用也越来越广泛,因此研究高性能的高频 PWM整流器及其控制方法仍然是电力电子技术研究的热点,具有很高的应用价值[1]。
本文针对航空静止变流器,设计了400Hz三相四线高功率因数PWM整流器主电路,分别建立了abc三相静止坐标系和dq同步旋转坐标系下的数学模型。针对传统PWM整流器电流内环控制方法输入电流与输入电压相位差较大的问题,本文采用基于dq同步旋转坐标变换的空间矢量控制方法,实现了输入电流与输入电压相位无静差控制,同时使输入电流波形具有很好的正弦度,达到了高功率因数的目的。针对直流输出端负载不对称等原因都可能引起输出串联电容两端电压不均衡的问题,本文提出了输出串联电容均压环与中线电流环串联的双闭环控制方法,很好地解决了输出串联电容的均压问题。
2 三相四线PWM整流器设计与建模
高频PWM整流技术经过20多年的发展,产生了多种拓扑结构,其中三相六开关PWM整流器由于具有输入电流THD小、能量可双向流动等优点而在中大功率场合广泛应用[2-4]。考虑实际应用的需要,本文选择系统功率主电路为三相四线六开关结构,如图1所示。为便于分析与简化系统模型,特做如下假设:(1)开关器件均为理想器件,无开关延时和导通压降。

图1 三相四线PWM整流器拓扑Fig.1 The topology of three-phase four-wire PWM rectifier
(2)三相输入电源为理想的对称电压源。
(3)同一桥臂上下开关管互补导通,不存在死区时间。
(4)两直流输出滤波电容均为理想电容,且电容值相等,即C1=C2=C。
定义三相各桥臂的开关函数为

则PWM整流器交流侧电压可表示为
定义两输出电容偏压为Δu=uC1-uC2,整流器直流输出电压为udc=uC1+uC2,则由基尔霍夫电压定律得到三相四线PWM整流器在abc三相静止坐标系下的高频模型为
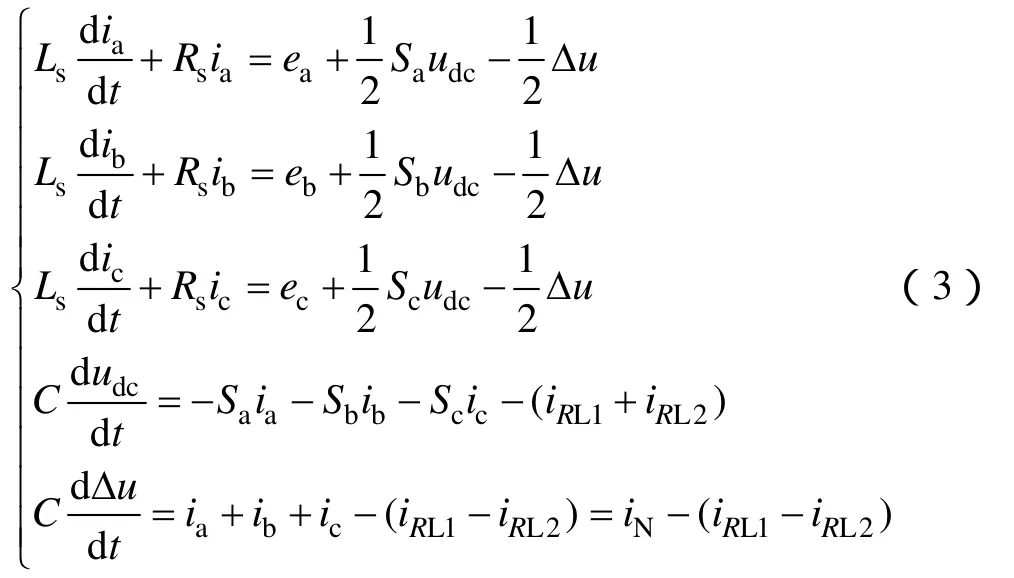
由于控制上选择双极性PWM调制方式,可得开关函数在开关周期内的平均值与占空比之间的关系为sk=2dk-1,代入式(3)即得三相四线PWM整流器的开关周期平均模型

由式(4)可知:当主电路为三相四线结构时,三相输入之间实现了完全解耦,可以对三相输入电流进行独立控制。但由于输入电流为交流量,在三相静止坐标系下控制输入电流,其与输入电压之间会有较大的相位差,不能实现高功率因数[5-9]。采用空间矢量控制可以在 dq同步旋转坐标系下实现对输入电流的无静差控制,使输入电流具有很好的正弦度并保持与输入电压同相位,实现高功率因数。
设计 abc三相静止坐标系到αβγ三维欧氏空间之间的变换矩阵为
而从αβγ三维欧氏空间到dq同步旋转坐标系之间的变换矩阵为

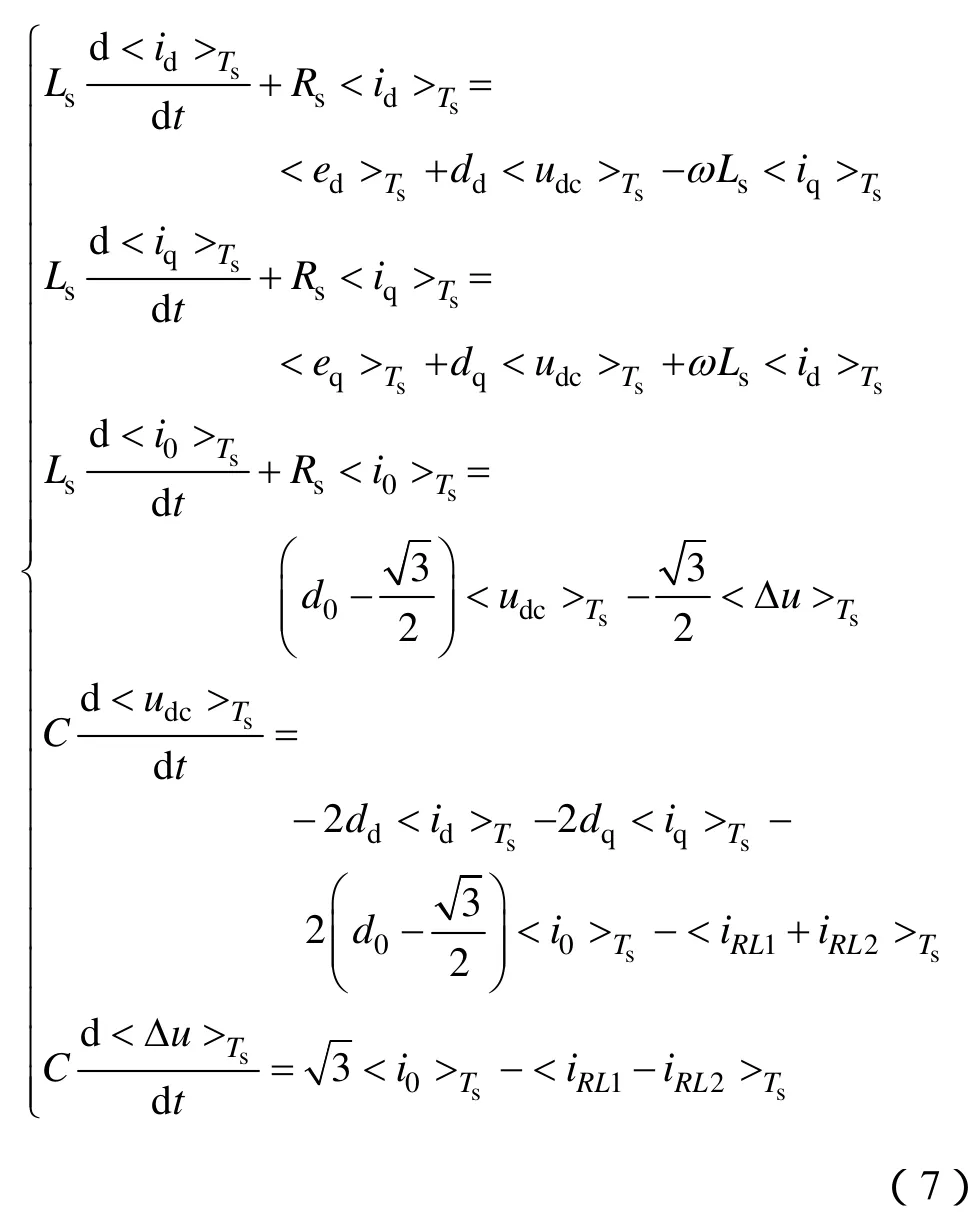
应用变换矩阵式(5)和式(6)对式(4)进行dq同步旋转坐标变换,得三相四线PWM整流器在dq同步旋转坐标系下的数学模型
3 三相四线PWM整流器控制系统设计
式(7)表明,经过dq同步旋转坐标变换后,三相输入电流的d、q两轴之间出现了耦合关系,控制上无法按单输入单输出系统对d、q和0轴分别进行独立控制。为此,需要引入前馈解耦控制,如图2所示。经过前馈解耦控制后,即可得到d、q轴之间完全解耦的输入电流数学模型

图2 dq轴间的前馈解耦控制框图Fig.2 The diagram of decoupling control between dq axis

假设三相静止坐标系下输入电流的表达式为
再假设 dq同步旋转坐标变换矩阵的相角为θ=ωt+φ2(亦为输入电压的相角),则通过变换矩阵对三相输入电流做同步旋转变换后得到

式(10)表明,由于变换矩阵与输入电流的初始相角都是确定的,三相静止坐标系下的交流输入电流变换成了dq同步旋转坐标系下的直流量,且输入电流的d轴分量反映了系统输入的有功功率,而q轴分量反映了系统输入的无功功率。因此,此时采用传统的PI控制使iq=0、id=idref,即可实现对输入电流的无静差控制,使输入电流与输入电压完全同相位,同时使输入电流具有很好的正弦度,达到高功率因数目的。
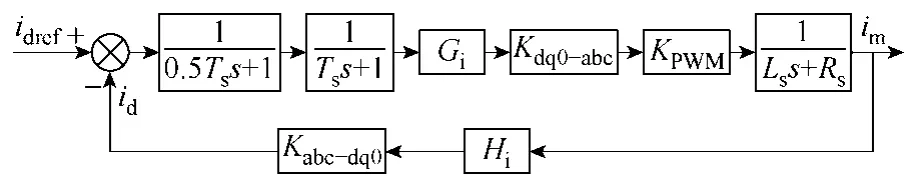
图3 输入电流内环控制框图Fig.3 The block diagram of the input-current control loop
对解耦后 dq同步旋转坐标系下的数学模型应用扰动和线性化处理方法[10],得到输入电流内环控制系统如图3所示,图中两一阶惯性环节用来等效A-D采样和PWM调制环节的延时;Gi为电流内环控制器,一般为PI环节; Kabc-dq0=和 Kdq0-abc为等功率变换过程中的变换系数;KPWM=Udc/(2Utri)为整流器的等效增益,其中Utri是双极性PWM调制中三角载波的幅值;Hi为输入电流采样系数。
假设系统输出负载对称,即RL1=RL2=RL,则输出电压外环控制系统如图4所示,其中Gv为电压外环控制器;Gic为电流内环闭环传递函数;Hv为输出直流电压采样系数;G(s)=ko(1-Tzs)/(1+TPs)为输入电流幅值到输出直流电压的传递函数,其中Ko=3RL(em-2RsIm)/(2Udc)、TZ=LsIm/(em-2RsIm)、TP=1+0.5RLC。由于电压外环开环传递函数中存在一个右半平面的零点,因此在设计控制器参数时不能简单地按最小相位系统进行设计,必须充分考虑右半平面零点的影响,否则可能影响系统的性能甚至导致系统不稳定。
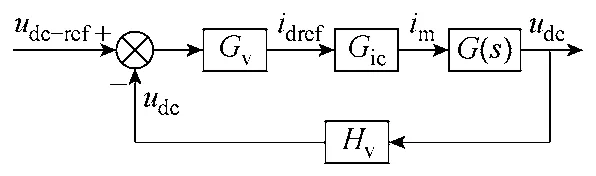
图4 输出电压外环的控制框图Fig.4 The diagram of the control loop for output voltage
由于主电路为三相四线结构,输出直流端负载不对称或电流控制器输出信号中出现直流干扰等情况都可能引起输出串联电容不均压,影响系统的正常工作[11-13]。由三相四线 PWM整流器系统模型对输出串联电容不均压的原因进行分析可知,系统中线电流是引起输出串联电容不均压的根本原因,输出直流端负载不对称和电流控制器输出信号出现直流干扰等最终都要通过中线电流引起输出串联电容不均压。相反,通过控制系统中线电流则可以对输出串联电容不均压情况进行有效控制。因而本文提出了一种输出串联电容均压环与中线电流环串联的双闭环控制方法,控制原理如图5所示。当系统因负载不对称或干扰等原因导致输出串联电容出现偏压时,均压外环控制器的输出为一常数,该常数作为0轴电流的给定值,通过电流内环控制器在调制信号中产生直流偏置,最终在系统的中线电流中产生直流分量,使输出串联电容电压恢复均衡。而在输出串联电容均压时,系统中线电流的给定值为0,不影响系统正常工作。

图5 输出串联电容均压控制系统原理图Fig.5 The diagram of the voltage balancing control strategy
对上述控制方法进行综合,得到三相四线高功率因数PWM整流器控制系统原理框图,如图6所示;其中 dq同步旋转坐标变换与反变换、PI控制参数计算、PWM 控制信号生成等均由 TMS320 F2812数字信号处理器实现,因此该系统为全数字控制系统。

图6 三相四线高功率因数PWM整流器控制系统原理图Fig.6 The block diagram of control system of three-phase four-wire PWM rectifier
由于主电路为 Boost型拓扑,在启动的过程中输入电流会有较大的无功分量,导致输入电流过冲严重,很容易引起输入过流保护甚至损坏开关管。工程上多采用串电阻的方法来解决启动问题。本文采用输入电流软启动的方法,在启动过程中将输入电流限值由零逐渐增加至最大值。由于在启动开始时刻输入电流给定被限制在很小的数值,因此电流内环会很快进入闭环状态,使无功电流迅速减小甚至降为零。随着电流给定限值的不断增加,输出电压也逐渐上升至额定值,使系统进入稳定工作状态、完成启动过程。
4 仿真与实验
根据上述的控制方法设计了额定功率为 3kW的原理样机,输入三相交流电压为115V/400Hz,输出直流电压为±200V,输入滤波电感为 2.7mH,两输出串联滤波电容均为2 200μF,开关频率为20kHz。
应用Saber软件对系统进行了仿真,其中图7a为A相输入电流仿真波形,该电流波形具有较好的正弦度,THD值仅为 4.6%,且输入电流与输入电压同相位,具有较高的功率因数;图7b为输出电压仿真波形,正、负直流母线电压均衡且很好地稳定在额定值。

图7 系统输入电流与输出电压仿真波形Fig.7 The simulation waveforms of the input current and output voltage
根据控制系统设计和仿真参数搭建了 3kW 原理样机。负载对称情况下系统稳态实验波形如图 8所示,其中图8a为A相输入电流与电压波形,相电流THD值为6.3%,且输入电流与输入电压始终保持同相位;图8b为输出电压波形,正、负直流母线电压均衡且为额定值。
负载不对称情况,即当输出端正直流母线负载为37.2Ω、负直流母线负载为72.6Ω时,实验波形如图9所示。其中图9a为系统输入电流、电压和中线电流实验波形,与负载对称情况相比,系统输入电流THD略有增加,但仍具有较好的正弦度;而中线电流则不断变化以实现输出串联电容均压。图 9b为输出串联电容两端电压,可见虽然负载不对称情况严重,但通过中线电流的不断调节,两输出滤波电容仍很好地实现了串联均压。

图8 负载对称情况下系统稳态实验波形Fig.8 The experiment waveforms under the case of the balancing load
上述仿真和实验结果均表明,本文所设计的系统及其空间矢量控制方法很好地实现了三相四线高功率因数PWM整流器的输入电流电压相位无静差控制;而输出串联电容均压环和中线电流环串联的双闭环控制方法在负载不对称的情况下也能够很好的实现对输出串联电容的均压控制。
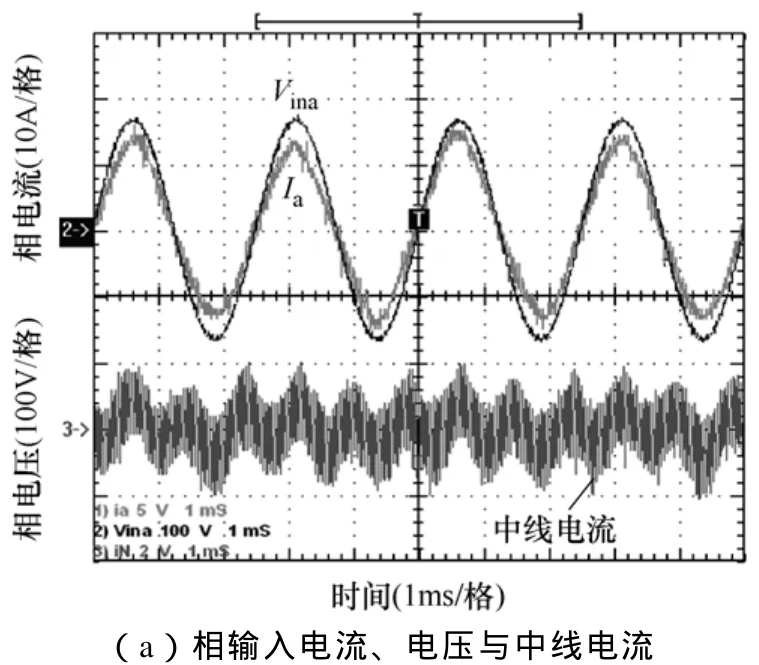
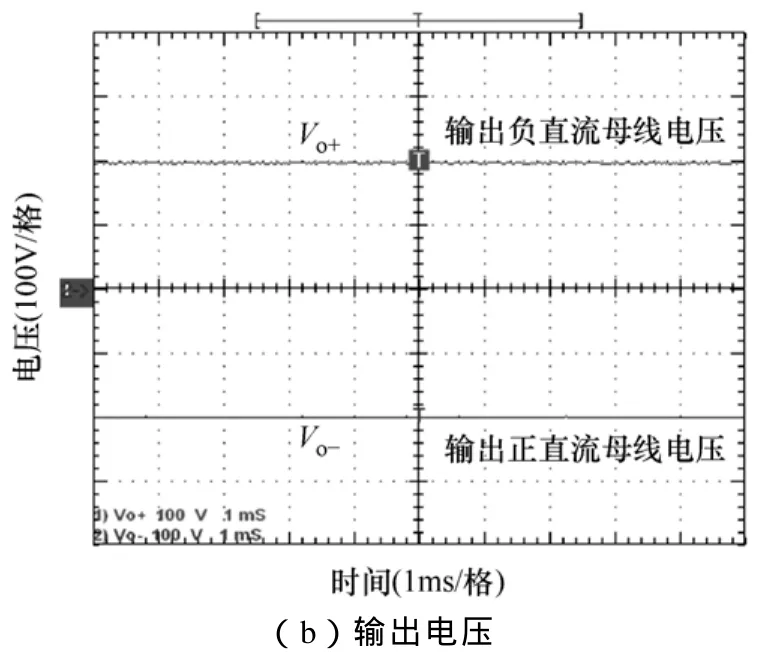
图9 负载不对称情况下系统Fig.9 The experimental waveforms under the case of the imbalance load
5 结论
本文针对三相四线整流器的特点,采用了三相四线六开关 Boost拓扑作为功率主电路,并进行了主电路系统建模分析;为了实现了输入电流电压相位无静差控制、达到高功率因数的目的,文中采用基于dq同步旋转坐标变换的空间矢量控制方法;针对负载不对称等原因造成的输出不均压问题,文中提出了输出串联电容均压环与中线电流环串联的双闭环控制方法。仿真和实验结果都验证了本文整流器系统控制方法的正确性与可行性。
[1]张崇巍, 张兴. PWM整流器及其控制[M]. 北京: 机械工业出版社, 2005.
[2]李玉玲.电流型 PWM 整流器及其控制策略的研究[D]. 杭州: 浙江大学, 2006.
[3]朱士海, 钱江, 钱照明. 三相AC-DC功率因数校正拓扑比较[J]. 电工电能新技术, 2002, 21(2): 72-76.Zhu Shihai, Qian Jiang, Qian Zhaoming. Comparison of three-phase AC-DC power factor correction topology[J]. Advanced Technology of Electrical Engineering and Energy, 2002, 21(2): 72-76.
[4]Bhim Singh, Brij N Singh, Ambrish Chandra. A review of three-phase improved power quality AC-DC converters[J]. IEEE Transactions on Industrial Electronics, 2004, 51(3): 641-660.
[5]何海洋. 三相高功率因素整流器研究[D]. 杭州: 浙江大学, 2006.
[6]陈瑶, 金新民, 童亦斌. 三相四线系统中三相电压型 PWM整流器控制策略[J]. 电工技术学报, 2007,22(7): 64-68.Chen Yao, Jin Xinmin, Tong Yibin. Control strategy of three phase voltage source PWM rectifier in three-phase four-wire systems[J]. Transactions of China Electrotechnical Society, 2007, 22(7): 64-68
[7]王英, 张纯江, 陈辉明. 三相PWM整流器新型相位幅值控制数学模型及其控制策略[J]. 中国电机工程学报, 2003, 23(11): 85-89.Wang Ying, Zhang Chunjiang, Chen Huiming. A new phase and amplitude control strategy and mathematics model of three-phase voltage rectifier [J]. Proceedings of the CSEE, 2003, 23(11): 85-89.
[8]郭文杰, 林飞, 郑琼林. 三相电压型PWM整流器的级联式非线性PI控制[J]. 中国电机工程学报, 2006,26(2): 138-143.Guo Wenjie, Lin Fei, Zheng Qionglin. The cascaded nonlinear PI control for three-phase voltage source PWM rectifier[J]. Proceedings of the CSEE, 2006,26(2): 138-143.
[9]Rajesh Ghosh, Narayanan G. Control of three-phase,four-wire PWM rectifier[J]. IEEE Transactions on Power Electronics, 2008, 23(1): 96-106.
[10]徐德鸿. 电力电子系统建模及控制[M]. 北京: 机械工业出版社, 2005.
[11]Lo YuKang, Song TzuHemg, Chiu HuangJen.Analysis and elimination of voltage imbalance between the split capacitors in half-bridge boost rectifiers[J]. IEEE Transactions on Industrial Electronics, 2002, 49(5): 1175-1177.
[12]Ramesh Srinivasan, Ramesh Oruganti. A unity power factor converter using half-bridge boost topology[J].IEEE Transactions on Power Electronics, 1998, 13(3):487-499.
[13]Jianjiang Shi, Baochen Wang, Xi Lu, et al. 400Hz three-phase PWM rectifier based on vector control with zero static error compensation[C]. Proceedings of the IEEE International Symposium on Industrial Electronics, Korea, 2009: 76-80.
猜你喜欢
科学家(2021年24期)2021-04-25
新世纪智能(英语备考)(2018年11期)2018-12-29
测控技术(2018年9期)2018-11-25
电子制作(2016年1期)2016-11-07
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
探测与控制学报(2015年4期)2015-12-15
电源技术(2015年1期)2015-08-22
