
基于步进电机的太阳自动跟踪系统的研究
2012-06-26 05:36马正华孔丹徐守坤
电气传动 2012年3期
马正华,孔丹,徐守坤
(1.常州大学 信息科学与工程学院,江苏 常州 213164;2.常州过程感知与互联技术重点实验室,江苏 常州 213164)
1 引言
作为清洁能源的太阳能,现在已经普遍应用于我们的生活之中。例如,太阳能热水器,太阳能蓄电,太阳能发电等[1]。在相同条件下,光照强度越大,太阳能电池输出功率越大,因而增大太阳能电池受光面的光照强度,就可增大太阳能电池输出功率。除了提高太阳光电池本身的转换效率和提高蓄电池充放电效应外,对太阳的自动跟踪是太阳光伏发电系统中另一种提高转换效率的有效手段。因此,在太阳能的利用过程中,实施太阳跟踪是很有必要的[2]。
太阳跟踪是提高利用率的一种途径,其方式主要有光电定位和天文定位。前者为被动跟踪,根据光学传感器所获得的数据来控制电机。该方法受环境影响较大,尤其在阴天或多云时及一些传感器探测不到的盲区;后者为主动式,由程序计算出太阳位置,控制步进电机实时跟踪太阳。由于后者大大提高了跟踪精度[3],所以在光电定位的基础上侧重于研究通过天文定位方式和控制步进电机实现的自动跟踪,在太阳能应用方面具有广阔的发展前景。
2 系统架构及工作原理
2.1 系统整体框架及组成模块
系统原理框图见图1。

图1 系统原理框图Fig.1 System principle block diagram
该跟踪系统主要由单片机控制模块、光电转换模块、键盘液晶模块、时钟模块和驱动及相应的外围电路等组成。软件部分主要包括模数转换程序,太阳高度角和方位角计算程序和步进电机的合适速度和步长计算程序,各模块驱动程序等。
2.2 系统组成
1)键盘及显示屏。键盘及显示模块由一个4×2的键盘和一块1602工业字符型液晶显示器(LCD)组成,主要用于时间参数的设置以及系统功能切换和相关参数的显示。
2)光电转换模块。通过安装在光电池上的光敏电阻来检测环境光线强弱程度,以区别白昼和夜晚;通过光电池两端的光敏电阻阻值之差来判断光线是否已对准光电池板的中心位置,是否发生偏移。检测到在阴天光照强度较弱时,系统将检测到的值与给定值进行比较,低于给定值,则系统自动处于待机状态,以减少能源消耗,从而实现系统的自动控制[4]。
3)电源电路模块。电源电路主要为MCU微控制模块、时钟模块、驱动模块等外围器件和控制系统中所用到的其他芯片提供工作电源。由于采用的单片机STC12C5A60S2用的是+5V电源。因此12V稳压电源一方面作为步进电机驱动器的工作电源;一方面经压降整流后为系统提供+5 V 电源[5]。
4)执行模块。执行模块主要包括驱动模块、步进电机以及相应的支撑结构。驱动模块接受微控制器的输出脉冲后,再经过光电隔离后进行放大循环输出。单片机通过程序计算出脉冲数,直接通过脉冲作用于步进电机使步进电机转过相应的角度,从而通过丝杆带动太阳能光板转动[6]。
3 系统设计
系统中所采用的天文定位方式即视日运动轨迹跟踪方式,利用程序计算出太阳高度角和方位角,并根据一定时间间隔产生的角度差值算出步进电机的转角,从而实现太阳跟踪,获取最大的太阳辐射节省自身能量的损耗。
3.1 系统软件设计
1)系统主程序。这里侧重研究用天文定位跟踪方式进行太阳跟踪,主程序主要完成对实时数据计算子程序的调用,并控制整个系统的运作流程,根据实际需求计算并发出脉冲信号,驱动步进电机转动相应的角度。太阳高度角和方位角计算程序和步进电机脉冲计算程序是两个主要子程序,其中太阳角度天文计算主要完成当地时间和位置下的太阳高度和方位角度,而步进电机脉冲控制计算主要完成根据角度差值计算发出脉冲的个数。
2)太阳角度天文计算。在太阳能利用中对天文参数的研究方面,现有的计算太阳的高度和方位角已有很成熟的技术基础。这里需要用到日地距离、积日、太阳赤纬角、太阳时角、时差、年度订正、经度订正、时刻订正等概念和计算方法,计算程序严格按照相关计算公式编写而成[7]。
3.2 太阳跟踪主程序设计
主程序按照天文定位跟踪方式,实时的对太阳高度角和方位角进行计算,并在高度角和方位角每累计到0.9°时发出一次脉冲信号,并驱动步进电机完成相应角度的转动。太阳跟踪系统主程序如图2所示。

图2 太阳跟踪系统主程序图Fig.2 The main program diagram of the sun tracking system
3.3 太阳角度天文计算设计
太阳角度追踪模式是基于太阳高度角和太阳方位角的计算而进行追踪的[8],在太阳高度角和太阳方位角的计算公式中需用到许多参数及相关的概念。
对于地球上的某个地点,太阳高度是指太阳光的入射方向和地平面之间的夹角,其值在0°~90°之间变化,日出日落时为0°,太阳在正天顶时为90°。太阳方位角是指太阳光线在地平面上的投影与当地子午线的夹角,可近似地看作是竖立在地面上的直线在阳光下的阴影与正南方的夹角。方位角以正南方向为零,向西逐渐变大,向东逐渐变小,直到在正北方合在±180°。
计算太阳高度角和方位角所需的表达式及相关参数的含义如下:
积日计算:即日期在年内的顺序号,如1月1日取为1,12月31日取为365闰年则为366。

太阳赤纬角计算:是地球赤道平面与太阳和地球中心的连线之间的夹角,赤纬角以年为周期,在23°26′与-23°26′的范围内移动,成为季节的标志。
太阳赤纬度:

式中:θ称为日角,θ=2π/365.2422。
太阳时是指以太阳日为标准来计算的时间。可以分为真太阳时和平太阳时。以真太阳日为标准来计算的叫真太阳时,日晷所表示的时间就是真太阳时。以平太阳日为标准来计算的叫平太阳时,钟表所表示的时间就是平太阳时。真太阳时与平太阳时之差即为时差。时差为
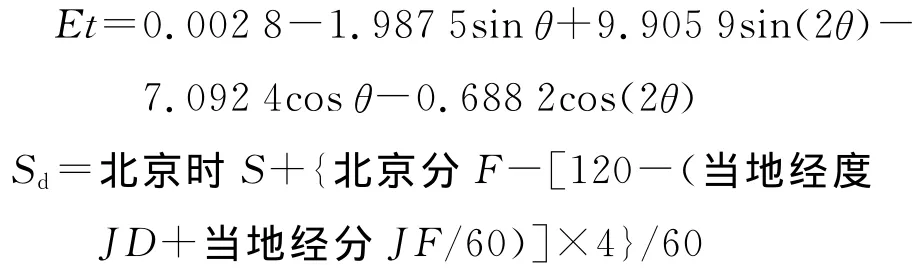
式中,120°是北京时的标准经度,乘以4是将角度转化成时间,即每度相当于4min,除以60将min化成h。

太阳高度角和方位角的计算公式为

式中:h为太阳高度角;A为太阳方位角;β为太阳赤纬角;α为当地纬度;τ为太阳时角。
计算流程图如图3所示[10]。

图3 太阳角度计算流程图Fig.3 The flow chart of the sun angle calculation
3.4 步进电机脉冲计算
利用公式计算出太阳高度角和方位角后,需计算一定时间间隔所累积的太阳高度角和方位角的差值,由此差值计算出相应的脉冲数,并使单片机芯片发出相应脉冲信号。在设计过程中,按每4min计算太阳高度角和方位角的差值,其差值为1°左右。而设计中的步进电机的步距为0.9°,所以按照前面的算法将给步进电机带来控制上误差,并且这个误差会累加。因此,关于步进电机的脉冲计算由时间累加转为角度累加,即累加计算太阳高度角和方位角的差值,其差值每累加到0.9°的时候发出一次脉冲,这样即满足步进电机的参数,又不会累计误差。步进电机脉冲计算流程如图4所示。
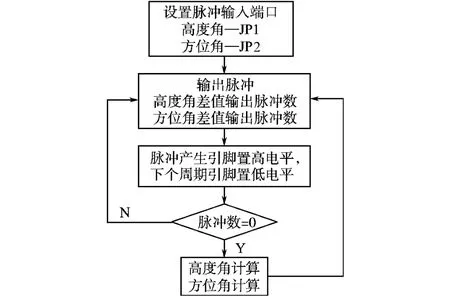
图4 步进电机脉冲计算流程图Fig.4 The flow chart of stepping motor pulse calculation
3.5 步进电机模块
步进电机是将电脉冲信号转换成相应的角位移或线位移的开环控制元件。当控制系统每发出一个步进脉冲信号,步进电机按设定的方向转动一个固定的角度,该角度称为步距角。其旋转是以固定的角度一步一步运行的,步进电机的步距角和转速只和输入的脉冲频率有关,不受环境因素影响。其转动方向则取决于输入脉冲的顺序,从而多应用在需要精确定位的场合。步进电机可以作为一种控制用的特种电机,利用其没有积累误差的特点,广泛应用于各种开环控制的场合。相比于直流电机或交流电机,步进电机更具有可控性和稳定性,跟踪精度较高,且受环境的影响小。
当对步进电机采用开环控制时,步进电动机受具有预定时间间隔的脉冲序列所控制,控制系统中无需反馈传感器和相应的电子线路。这种线路具有简单、费用低的特点,使步进电动机的开环控制系统得以广泛的应用。
而当在闭环控制下,步进电动机可自动、有效地被加速和减速。由于电机励磁转换是以转子位置信息为基础的,电流值决定于电机负载,因此,即使在低速度范围内,电流也能够充分转换成转矩。输出功率/转矩曲线得以提高。其可在具有给定精确度下跟踪和反馈时,扩大工作速度范围,或可在给定速度下提高跟踪和定位精度等。
步进电机的品种规格很多,按照励磁方式可分为3大类,即:反应式步进电机(VR),永磁式步进电动机,混合式步进电动机。由于混合式步进电机结构复杂,成本较高,永磁式步进电机须供给正负脉冲信号,而又需要考虑系统制作成本及复杂度,因此,本系统采用成本低,结构简单,性价比较高的反应式步进电机[11]。
3.5.1 步进电机工作具体步骤
以三相电机为例,如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同);如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3τ,此时齿3与C偏移为1/3τ,齿4与A偏移(τ-1/3τ)=2/3τ;如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3τ,此时齿4与A偏移为1/3τ对齐;如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3τ。这样经过A,B,C,A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A…通电,电机就每步(每脉冲)1/3τ,向右旋转。如按A,C,B,A…通电,电机就反转[10]。
3.5.2 步进电机计算:
步进电机步距角θb,计算公式如下:

步进电机的转速n由下式表示:

式中:f为输入脉冲的频率,Hz;Z为转子的齿数;N为转子转过一个齿距的运行拍数。
由上面的式子可以看出,步进电机在工作过程中,励磁状态是周期性循环变化,每完成一个状态循环,电机转过一个齿距。错齿是促使步进电机旋转的根本原因。因此,步进电机的运动控制问题从根本上说就是要控制输入到步进电机的脉冲[12]。
系统选用步距为0.9°/1.8°的步进电机,其步距角可称为“电机固有步距角”,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。系统在暂不考虑太阳能板转动所需转矩的情况下,对步进电机的选择主要为了解决系统中存在的周期性误差问题,并实现对太阳高度角和方位角角度变化的跟踪。因此,选用步进电机为86BYG250A型步进电机,步距角0.9°/1.8°,并通过中间抽头的接线方式,利用步进电机驱动控制模块实现步进电机半步工作模式,即实现步距角为0.9°,从而更好地实现基于步进电机的太阳跟踪。
4 系统测试结果
分别在经纬度为(+119.08°,+31.09°)和(+87.6°,+43.8°)的位置计算出6组不同时间,不同日期高度角和方位角的值,并与Skymap软件计算值进行比较,获得的值经Matlab仿真,得到比较图如图5、图6所示。其中圆圈表示通过软件获得的数值,叉号表示通过本文公式计算而得的数值。通过比较发现不同经纬度下两组数值之间的最大误差为0.7°,因此基本符合要求。
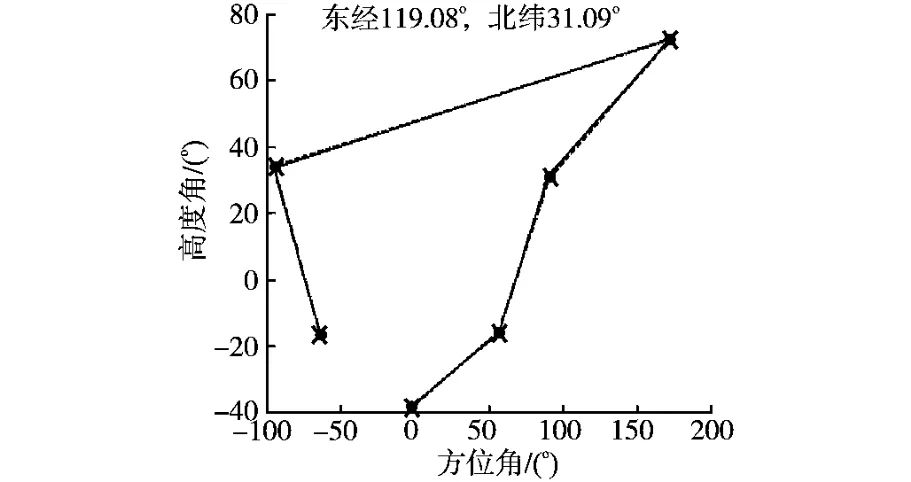
图5 在经纬度为(+119.08°,+31.09°)时的比较结果Fig.5 The comparison results of(+119.08°,+31.09°)

图6 在经纬度为(+87.6°,+43.8°)时的比较结果Fig.6 The comparison results of(+87.6°,+43.8°)
5 结论
本系统进一步提高了太阳方位跟踪精度,降低了光伏发电成本,通过对控制系统的比较,发现太阳方位跟踪系统能够准确地进行自动跟踪,在光电定位的基础上使太阳方位跟踪不受环境的影响。该太阳方位跟踪系统精度高、结构简单、价格低廉,具有较强的应用价值,有望在太阳能自动跟踪系统中得到更好的推广。
[1]邹建,姬兴,杜海涛.一种新型的太阳自动跟踪系统研究[J].光电子技术,2010,30(3):159-163.
[2]王海鹏,郑成聪,徐丹,等.基于单片机的太阳自动跟踪装置的设计与制作[J].科学技术与工程,2010,10(19):4651-4655.
[3]李鹏,杨培环,廖锦城,等.步进式双轴太阳跟踪运动控制方法的研究[J].机械制造,2009,47(544):15-18.
[4]侯长来.太阳跟踪装置的双模式控制系统[J].可再生能源,2010,28(1):89-92.
[5]夏小燕.大范围太阳光线跟踪传感器及跟踪方法的研究[D].南京:河海大学,2007.
[6]马健,向平,赵卫凤,等.基于步进电机的太阳跟踪系统设计[J].电力电子技术,2008,42(9):34-36.
[7]廖锦城.计算机控制双轴太阳跟踪系统及其偏差检测[D].武汉:武汉理工大学,2008.
[8]梁龙学,李军伟,张文发,等.一种新颖的太阳自动跟踪装置[J].甘肃科技纵横,2010,39(5):68-69.
[9]吕文华,贺晓雷,于贺军,等.全自动太阳跟踪器的研制和应用[J].光学精密工程,2008,16(12):2544-2549.
[10]张翌翀.基于DSP的太阳跟踪控制系统研究[D].上海:上海交通大学,2008.
[11]杨培环.高精度太阳跟踪传感器与控制器的研究[D].武汉:武汉理工大学,2010.
[12]任超.太阳自动跟踪装置控制系统的研究[D].武汉:武汉理工大学,2007.
猜你喜欢
科学大众(2022年23期)2023-01-30
数学物理学报(2022年3期)2022-05-25
空间科学学报(2020年4期)2020-04-22
数学物理学报(2019年5期)2019-11-29
现代计算机(2018年19期)2018-08-01
小哥白尼(趣味科学)(2018年4期)2018-06-21
中成药(2017年12期)2018-01-19
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
河南科技(2015年18期)2015-11-25
少儿科学周刊·儿童版(2015年7期)2015-11-24
