
基于BP神经网络无刷直流电机换相转矩脉动抑制方法的研究
2012-06-21 09:00李春峰
长春大学学报 2012年10期
李春峰
(长春大学 电子信息工程学院,长春 130022)
0 引言
无刷直流电机由于具有结构简单、动态性能好、效率密度高、输出转矩大等优点,被广泛的应用于如航空航天、汽车电子、机器人、精密电子仪表等个各个领域。但无刷直流电机又是一个多变量、时变、非线性的复杂系统,其精确的数学模型很难建立。在无刷直流电机运行过程中产生的噪声、振动、谐振等转矩脉动,将直接影响无刷直流电机运行的可靠性和精确度,进而影响其使用寿命。根据转矩脉动产生的原因不同,转矩脉动大概可以分为两类,齿槽转矩脉动和换相转矩脉动,齿槽转矩脉动可以从物理上即在生产过程中尽量减少或消除,但换相转矩脉动是由于无刷直流电机绕组上的电感作用使无刷直流电机绕组电流换相产生而产生的,它无法通过物理方法消除,也是目前国内外学者研究的重点和难点。先后研究出重叠换相法、电流预测控制、PWM斩波法等。因此本文将设计智能控制方法即BP神经网络参数自学习PID控制器来对无刷直流电机换相转矩波动进行抑制,从而提高无刷直流电机控制系统性能。
1 无刷直流电机数学模型
无刷直流电机是由电动机本体、位置传感器和驱动电路三部分组成,无刷直流电机等效电路图如图1所示,无刷直流电机绕组电压平衡方程为:

则矩阵方程为:

其中:Ra=Rb=Rc,Laa=Lbb=Lcc,Lab=Lac=Lba=Lbc=Lca=Lcb=M。
则矩阵方程可变为如下形式:

又由于ia+ia+ia=0,Mib+Mic=-Mia。则上述矩阵方程变化如下:

则无刷直流电机电磁转矩方程为:

无刷直流电机动力学方程为:

其中:P-无刷电机极对数,J为无刷电机转动惯量,D为粘滞系数,ω无刷电机机械转速。

图1 无刷直流电机等效电路图
2 无刷直流电机换相转矩脉动产生原因的分析[4]
无刷直流电机运行时包含换相区域和导通区域两个运行状态,而在无刷直流电机导通区域定子绕组有两项导通,在换相区域定子绕组全部导通,无刷直流电机绕组A、相导通模型如图2所示,B当定子绕组A、B相导通时无刷直流电机电流方程为:

故此时的无刷直流电机电磁转矩为:

当无刷直流电机B相换到C相开始时,绕组续流相和导通相的回路电路方程为:

因上述无刷直流电机续流时间很短,故由此引起的感应电动势可以忽略不计,故上述表达式可以变化如下:

而iB变化到0是所需要的时间为:

因此无刷直流电机导通回路的电流方程表达式为:

由此可知无刷直流电机电流变化的速率为:

故无刷直流电机在换相时,iBeBA、iCeCA对应的电磁功率相应减小或增加,当iBeBA-iCeCA=0时,电磁功率不变化,当其差值变化很大时,引起的无刷直流电机 换相转矩脉动就越大。

图2 无刷直流电机绕组A、B相导通模型图
3 无刷直流电机换相转矩脉动的抑制
3.1 BP神经网络参数自学习PID控制器的设计
BP神经网络参数自学习PID控制器对无刷直流电机换相转矩脉动抑制的结构图如图3所示。本文设计的控制器由PID控制器和BP神经网络两部分组成,BP神经网络的自学习根据无刷直流电机的运行状态来调整权值系数,根据BP神经网络自身的不断学习,使经典的PID控制器Kp、Ki和Kd在线整定,进而使整个控制系统参数达到最优,实现对无刷直流电机换相转矩波动的抑制。
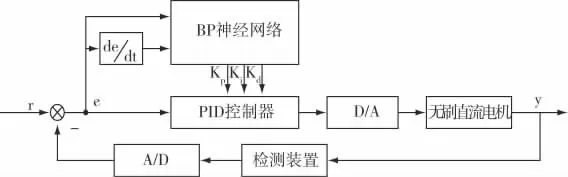
图3 基于BP神经网络参数自学习PID转矩波动抑制的结构图
3.2 基于BP神经网络参数自学习PID换相转矩脉动抑制控制算法的实现[8]
当控制输入r=im,中间变量u=k,其中k为PWM信号占空比,则PID控制方程式如下:

当函数关系为非线性关系时,方程式可转化为如下方程式:

故当整个控制系统采用BP神经网络抑制无刷直流电机换相转矩脉动时,通过时时在线调节PID控制器的比例系数Kp、积分系数Ki和微分系数Kd,实现对无刷直流电机的换相转矩波动的抑制,并达到效果最佳。
本文设计的BP神经网络采用2个输入节点、5个隐层节点和3个输出节点的三层神经网络,隐含层神经元采用正负对称的Sigmoid函数,其数学表达式为:

网络输入层的输入数学表达式为:

式中:a=2,a表示输入结点个数,其大小取决于被控制系统的复杂程度。
神经网络隐含层输入、输出数学表达式为:


4 实验分析
为了验证BP神经网络参数自学习PID控制器设计完成后在无刷直流电机换相转矩脉动抑制方面的效果,本文实验装置采用教学仪器设备公司生产的直流无刷电机机组,将其进行改装后,在实验装置中加入本文设计的BP神经网络参数自学习PID控制器,来进性无刷直流电机换相转矩脉动抑制试验,通过无刷直流电机空载和加入负载100MA后转速输出波形观察换相转矩脉动抑制情况。电机采用的是额定电压220伏;额定电流2安;额额定转矩1.3牛米(Nm);额定功率400瓦;最大转矩2.6牛米(Nm);定位转矩0.04牛米(Nm);额定转速3000转/分;极对数5极对。数字信号处理器采用TMS320F2812,实验结果如图4、图5、图6、图7所示。

图4 速度闭环300转空载速度曲线

图5 速度开环300转空载速度曲线
图6 闭环600转负载100MA加载过程速度曲线
5 结语

图7 闭环600转负载100MA去载过程速度曲线
通过以上对无刷直流电机换相转矩脉动抑制的研究发现,设计了用于抑制换相转矩脉动的控制器,即BP神经网络参数自学习PID控制器,此控制器是BP神经网络与经典PID控制相结合的智能化控制器,通过在线时时调整比例系数Kp、积分系数Ki和微分系数Kd,从而使无刷直流电机换相转矩脉动的一直达到最优。故通过以上的研究必将对今后从事无刷直流电机研究的学者提供帮助和借鉴,同时也将进一步扩大无刷直流电机的应用空间。
[1]左旭坤,李国丽.基于神经网络的直流无刷电机控制系统[J].控制与检测,2006(6):53-56.
[2]王玲,程耕国,赵玉寿.基于BP神经网络的无刷直流电机控制器优化设计[J].大电机技术,2012(2):19-21.
[3]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[4]刘刚,王志强,房建成.永磁无刷直流电机控制技术与应用[M].北京:机械工业出版社,2008.
[5]夏长亮,文德,王娟.基于自适应人工神经网络的无刷直流电机换相转矩脉动抑制新方法[J].中国电机工程学报,2002,22(1):54-58.
[6]许鹏,郭桂芳,王曹军义,侯哲,曹秉刚.直流无刷电机神经网络直接转矩控制[J].中国电机工程学报,2009,29(12):192-196.
[7]荆涛.无位置传感器无刷直流电机调速系统的研究[D].西安:西北工业大学,2005.
[8]姜长生,王从庆,魏海坤,陈谋.智能控制与应用[M].北京:科学出版社,2007.
猜你喜欢
大电机技术(2022年5期)2022-11-17
中国特种设备安全(2022年3期)2022-07-08
九江学院学报(自然科学版)(2022年2期)2022-07-02
大电机技术(2021年6期)2021-12-06
电子制作(2019年10期)2019-06-17
电子制作(2017年1期)2017-05-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年7期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
舰船科学技术(2015年8期)2015-02-27
