基于BP网络的驾驶员黄昏空间距离判识规律*
2012-06-19 05:13赵炜华刘浩学
武汉理工大学学报(交通科学与工程版) 2012年4期
赵炜华 刘浩学 陈 昊
(长安大学汽车学院 西安 710064)
交通事故日发生规律统计显示,黄昏时段交通事故多发[1].交通事故发生因素的相关研究表明,驾驶员因素起主要作用,占发生事故的80%以上.驾驶员在驾驶车辆过程中,感知道路交通信息,是驾驶行为和决策的基础[2].在驾驶员事故致因中,感知失误占42%,判断失误占36%.而对于驾驶员感知信息的方式研究又表明,无论采用上行模式还是下行模式获取交通信息,90%以上信息感知来自于视觉[3-5].由此可见,视觉特征的相关研究,对于改进驾驶员行车安全具有重要意义.在以前相关研究中,对于黄昏交通事故的成因分析,多集中于暗适应的影响[6].在道路交通标志设置中,针对黄昏时段环境照度不断下降,而人眼对蓝色光波长的光线最为敏感,且视认性最高的特性,进行交通标志的颜色设计.相关文献研究了昼间动态环境中红、绿色障碍物随着速度变化,空间距离判识及差异的数量关系[7-8].但随着黄昏时段环境照度不断下降,驾驶员对于距离判识会如何变化,对驾驶员行车策略有何影响等问题,仍未可知.在驾驶员信息加工过程研究中,由于神经学和生理学限制,且人工神经网络具有强大的学习功能,可以比较轻松的实现非线性映射过程,尤其是可在信息处理模式未知情况下可分析相互关系,使得对于生物神经的模拟研究应用逐渐增多[9-10].本文力图通过实际道路试验,获取神经网络学习样本,运用3层BP神经网络,模拟驾驶员在黄昏时段,判识空间距离随环境照度下降而变化的定量规律,分析其对于驾驶行为和交通安全的影响.
1 实验设计与被试选择
1.1 试验设计
依据费希纳定理可知,感知差异与物理量差异,呈非线性的关系.因此,试验环境照度在多次准备试验的基础上,根据多人次判识差异聚类分析,确定正式试验环境照度.结果分别为3000,2000,1000,500,200,50,10,2,0.6lx等9个照度值.试验均在设计照度下进行,并严格控制试验步骤[11].试验现场设计如图1所示.
1)试验道路为1100m 直线路段,方向为东西走向;试验时间区段为18:30~20:00时,天气晴或多云.
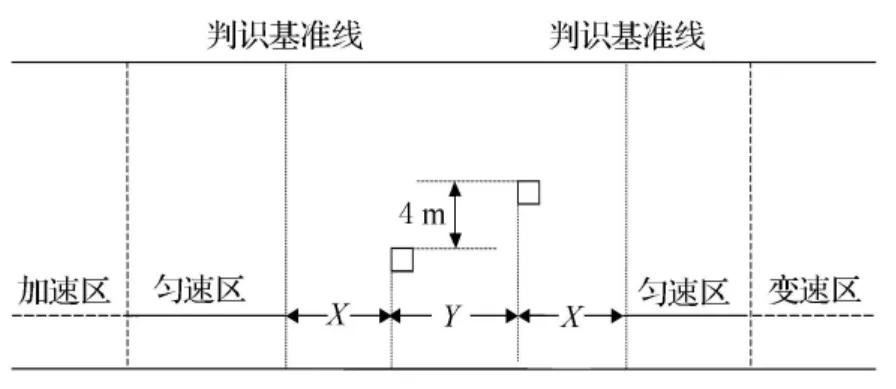
图1 试验现场设计
2)在车辆行驶深度方向,辨识点与第一障碍物的距离,按近距离(25m)、中等距离(75m)、远距离(125m)3种状况设置,两个障碍物之间的相对距离始终为40m 不变,被试分别对3组深度距离不同的障碍物进行判识.
3)被试在未知实际距离情况下,判识障碍物的空间距离.开始时,车辆位于判识标杆处,被试驾驶员坐入驾驶座,并保持驾驶姿态.被试判识同一环境中的绝对空间距离X(车头与第一判识点障碍物距离)和两障碍物之间的相对距离Y,分别直接报出X 和Y 的主观判识数值.除直接报出距离数值外,要求每位驾驶员试验结束后,对每组判识过程进行系统描述.
4)试验车辆为福特全顺JX6541B-H 型,前风挡玻璃无遮挡物影响;道路障碍物尺寸为0.5m×0.5m×1.3 m,颜色选用暖色调的红色和冷色调的绿色;环境照度用LX1330B型数字照度计测试.
1.2 被试选择
被试驾驶员按照随机性原则选取,并注意相关因素的影响,共选取不同行业、不同驾驶经历、不同职业、不同年龄和不同驾龄的32名男性驾驶员.要求驾驶年限均超过5 年驾龄,持有B 照以上驾驶执照.视觉机能正常,技术娴熟,且有良好的驾驶习惯,无生理缺陷和重、特大事故经历.被试基本情况如表1所列.

表1 被试驾驶员基本情况分类表
2 试验结果
将全部被试在不同试验条件下获得的距离判识结果,分别进行配对T 检验,以分析颜色对判识结果的影响.检验结果表明,黄昏时随着环境照度下降,不同颜色障碍物距离判识差异显著;随着深度距离增加,不同颜色障碍物距离判识差异显著.取不同判识条件下被试判识结果平均值,作为驾驶员距离判识特征值.因红、绿颜色障碍物的判识差异显著,分别建模对所获判识结果进行分析.
3 判识距离变化规律
1)模型结构 基于距离判识结果,利用BP神经网络,建立驾驶员黄昏空间距离判识模型.模型采用3层前向BP 神经网络,输入层为照度和深度距离,共2 个神经元;对于模型隐含层神经元,绝对距离判识模型中红色障碍物为15个神经元,绿色为17个神经元;红、绿色相对距离模型隐含层均为14 个神经元;输出层为空间距离判识值,仅有1个神经元.
2)模型算法 隐含层的神经元均采用正切tansig函数作为传递函数,将输入值进行归一化处理.输出层的神经元采用logsig函数,训练函数考虑网络泛化能力,选取了trainbr函数.训练步数为2000,调整比率为0.5,学习误差设置为不超过0.1%.
4 模型训练及模拟
4.1 黄昏距离判识模型训练及检验
利用实验方案中的环境照度和深度距离为输入量,驾驶员距离判识平均量为输出指导值,训练BP神经网络模型,模拟判识距离变化.再将判识数据和试验设计值作为网络测试样本,检验数据拟合程度.模型经过学习样本的训练,得到满足误差要求的权值和阈值,并将其保存到模型中,作为模型的参数,然后用该模型进行判识距离模拟.经检验,模型对判识数据拟合程度非常好,指导值与模型检验结果之间差异在有限范围内.
4.2 黄昏距离判识变化模拟
利用训练好的模型,模拟计算不同深度距离下绝对距离判识值,其结果如表2所列.
采用相同处理方法,可获得判识相对距离随深度距离和环境照度的变化趋势,其结果如表3所列.
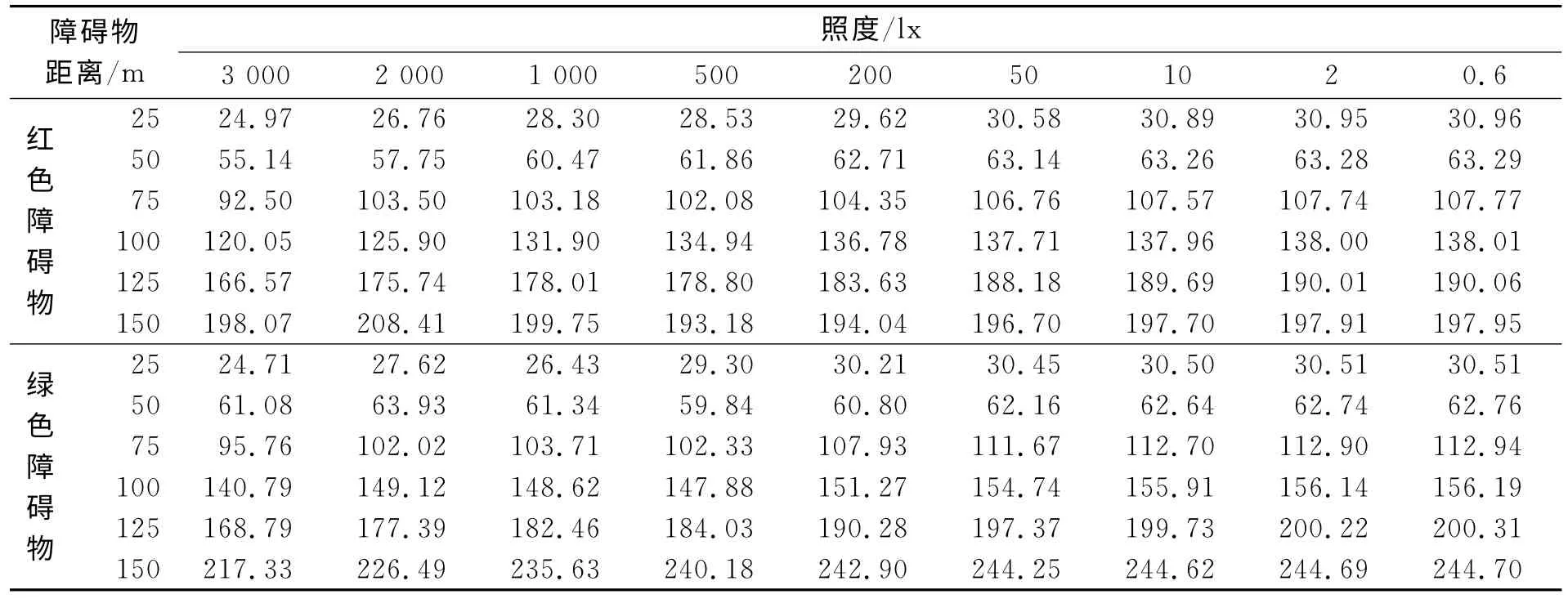
表2 黄昏判识绝对距离模拟结果
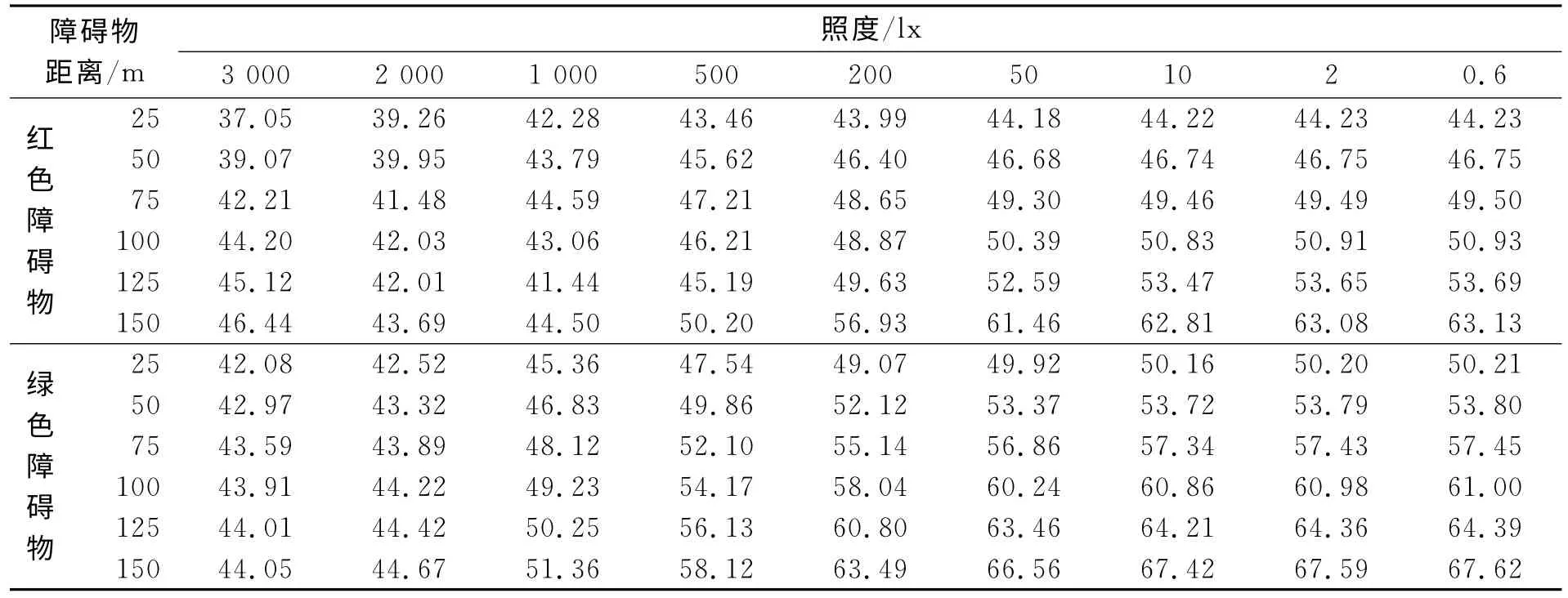
表3 黄昏判识相对距离模拟结果
计算结果所得判识距离大于白天判识距离,变化趋势与被试对空间距离感知变化的总结性描述一致,模拟结果可信.
黄昏时段随着环境照度不断下降,车辆行驶方向上相同深度距离判识值逐渐增大,造成驾驶员对于车辆运行状态安全性主观感受大于实际水平,因此驾驶员易采用高于实际允许的行车速度或更小的跟车距离,诱发交通事故.同时驾驶员在黄昏空间距离辩识变化规律的定量研究,不仅对于车辆跟驰模型建立、事故勘查、驾驶行为模拟和驾驶员指导培训具有重要意义,而且对于特殊气候条件下行车安全和工程实践应用具有重要作用.
5 结 论
1)在黄昏时段,判识距离大于实际距离,随着环境照度的不断下降,判识空间距离进一步增大.
2)在黄昏时段,随着深度距离增加,判识距离也逐渐增大,与实际距离的差异也逐渐增大,但相对距离判识准确性高于绝对距离.
3)黄昏时段红、绿色障碍物引起的判识距离存在差异,绿色判识距离大于红色.
4)黄昏驾车时,驾驶员须降低车速或增大跟车距离,以保障足够的碰撞接触时间.
[1]黄 俊,方守恩,白玉琼.道路交通事故的时间分布[J].公路交通科技,2004,21(9):112-116.
[2]袁 伟,付 锐,郭应时,等.汽车驾驶人感知-决策-行为模式[J].长安大学学报:自然科学版,2007,27(3):80-83.
[3]刘浩学,刘晞柏.交通心理学[M].西安:陕西省科学技术出版社,1992.
[4]周荣刚,张 侃.多参照系条件下信息获取方式对绝对方位判断的影响[J].心理学报,2008,40(11):1137-1148.
[5]LEE D N.A theory of visual control of braking based on information about time-to-collision[J].Perception,1976(5):437-459.
[6]WANG Wenqun,CHEN Haibo,BELL M C.A review of traffic incident duration analysis[J].Journal of Transportation Systems Engineering and Information Technology,2005,5(3):127-140.
[7]刘浩学,赵炜华.驾驶员昼间动态环境暖色调障碍物空间距离判识规律[J].交通运输工程学报,2009,9(2):105-109.
[8]赵炜华,刘浩学.色调对昼间动态环境中驾驶员空间判识的影响[J].长安大学学报:自然科学版,2009,29(5):90-94.
[9]DUNCAN J,HUMPHREYS G W.Visual search and stimulus similarity[J].Psychological Review,1989,96:433-458.
[10]贾林祥.试析认知心理学的三种研究取向及其未来发展[J].徐州师范大学学报:心理学和科学版,2005(3):114-117.
[11]艾森克M W,基恩M T.认知心理学[M].高定国,译.上海:华东师范大学出版社,2008.
猜你喜欢
绿色建筑(2020年3期)2020-11-23
基层中医药(2020年7期)2020-09-11
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中国生殖健康(2019年8期)2019-01-07
照明工程学报(2017年3期)2017-07-10
西南军医(2015年5期)2015-01-23
江苏卫生事业管理(2013年5期)2013-03-11