
基于图像信息检测的船-桥智能避碰系统研究*
2012-06-19 05:13:24郑元洲吴卫国张文涛徐海祥
武汉理工大学学报(交通科学与工程版) 2012年4期
郑元洲 吴卫国 张文涛 徐海祥
(武汉理工大学交通学院1) 武汉 430063) (华中科技大学多普信息处理国家重点实验室2) 武汉 430063) (教育部高速舰船研究中心3) 武汉 430063)
0 引 言
智能视频监控是利用计算机视觉技术对视频信号进行处理、分析和理解,在不需要人为干预的情况下,通过序列图像自动分析对监控场景中的变化进行定位、识别和跟踪,并在此基础上分析和判断目标的行为,能在异常情况发生时及时发出警报或提供有用信息,有效地协助安全人员处理危机,并最大限度地降低误报和漏报.因其主动性、实时性、智能化、成本低廉等特点,智能视频监控产品正被越来越广泛地应用于生产生活的各个方面.
本文通过计算机工具处理、智能识别视频信号,结合船舶操纵理论等,对船-桥碰撞事故致因及船桥碰撞危险态势评估进行研究,采取计算机模拟和实验相结合,建立基于视频信息检测的船桥智能避碰决策系统.
1 系统内容
本文采取计算机模拟仿真和现场实验相结合,开展基于视频信息检测、处理与船舶操纵推理的桥区船舶航行安全研究.研究内容包括:(1)桥区环境视觉信息采集与处理;(2)桥区船舶运动态势评估及其与桥梁碰撞威胁估计;(3)基于船舶操纵运动知识推理的航迹预报与控制.
2 系统方案
2.1 概述
根据研究目标要求,将系统划分成3个主要模块:运动船舶检测、视觉几何模型与船舶运动态势计算和碰撞预测与控制.系统总体结构见图1.

图1 视频检测船桥智能避碰系统总结构图
2.2 运动船舶检测算法
由于将基本的背景建模方法直接用于检测的问题往往效果不佳,主要原因在于背景的复杂性、传感器的运动以及图像质量问题.在设计算法时,要着重考虑上述复杂因素的影响.具体地,针对背景的复杂性,采用基于时-空域统计信息的背景建模方法.该算法的示意图见图2.
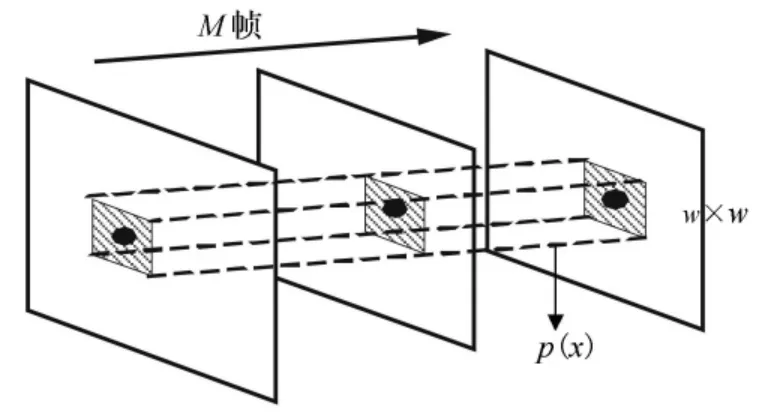
图2 基于时-空域统计信息的背景建模方法算法示意图
算法的主要思想是:在像素x 处,利用其在空间上w×w 邻域、时间上相邻m 帧内的w×w×m 个像素估计一个概率分布(直方图)p(x),然后利用最大概率所对应的像素值bx作为x 处的背景模型像素值.运动目标图像F 由输入帧I 与背景模型B 的差分得到,即F=|I-B|.为进一步克服噪声和动态背景的影响,利用阈值TF进行对F 进行二值化,然后进行形态学膨胀运算[1].
因为传感器安装在桥体上,桥体的振动会造成传感器的抖动.这里,认为传感器的抖动主要在垂直方向上.相应地造成图像在垂直方向的平移.采用相位相关算法进行图像配准得到图像偏移量,然后根据偏移量进行补偿.
该算法的主要思想是:
假设2幅大小相同的图像f1(x,y)和f2(x,y)之间存在相对平移(x0,y0),即

若f1和f2对应的傅里叶变换分别为F1(u,v)和F2(u,v),则它们之间有如下关系

f1(x,y)和f2(x,y)的互功率谱的相位为

针对图像的质量问题,加入图像增强预处理.为克服图像噪声和光照条件导致的图像对比度低的影响,加入中值滤波和图像直方图均衡化处理.
2.3 视觉几何模型与船舶态势计算
运动船舶检测算法得到的目标是在图像坐标系下表达的,而运动态势计算必须在空间坐标系下进行,需要进行图像坐标与空间坐标的转换.转换算法是基于计算机视觉几何模型的,方法如下(见图3).
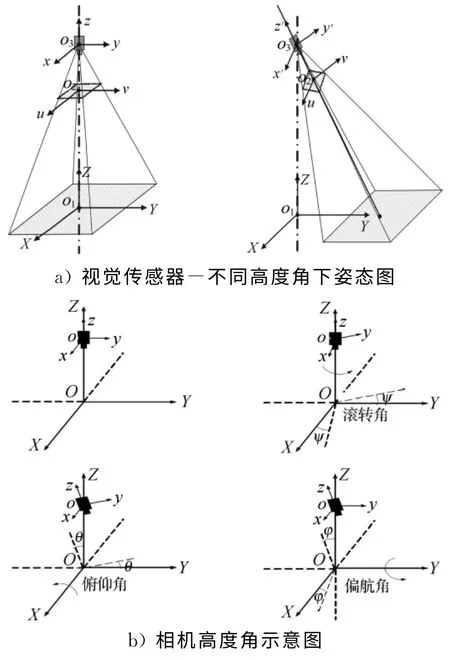
图3 船舶运动态势图像坐标与空间坐标转换示意
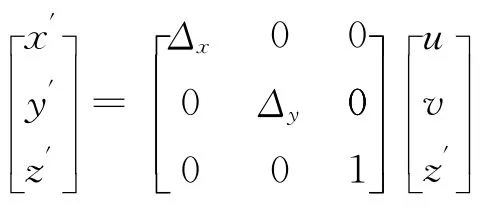
首先考虑传感器正下视情况如图3a)所示,有几何关系[2]
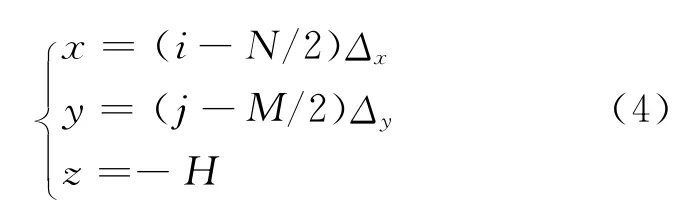
式中:Δx=2 H·tan(τx/2)/N;Δy=2 H·tan(τy/2)/N.
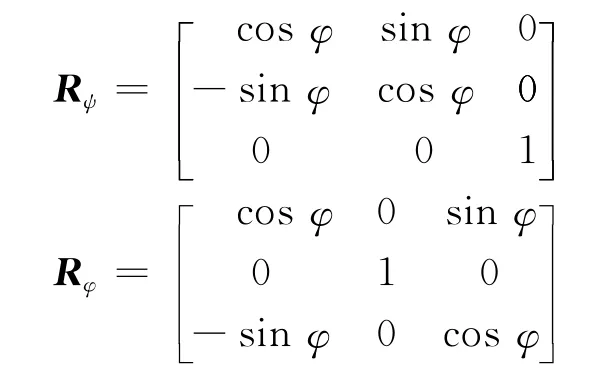
在一般情况下,将传感器的姿态(见图3b))看作由正下视情况经过绕3个坐标系旋转得到,这3个角即滚转角、俯仰角和偏航角的定义,见图3.于是有
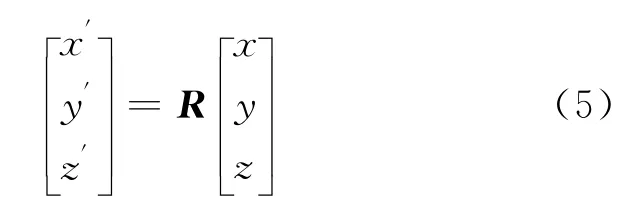
式中:旋转矩阵R=Rψ·Rθ·Rφ.
而有相机内参数决定的几何关系在一般姿态下仍然成立,即有[3]u=i-N/2,v=j-M/2.
联合以上各式,得到
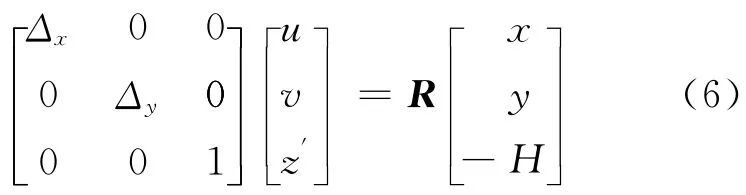
解上式得到(x′,y′,z′)和(i,j)的转换关系式.以上各式中:φ,θ,ψ,H,M,N 为参数.
2.4 运动态势参数提取
基于船舶航行操纵知识,所选取的运动态势参数包括:位置、大小、速度、航向角、离桥墩的距离.这里给出这些参数的计算方式.图4为参数计算示意图.
1)位置 以船舶中心点的地理坐标作为其位置,如图4实心圈所示.
2)大小 将图像中所检测到的目标区域的所有像素坐标转换为空间坐标,以所有空间坐标的外截矩形作为目标区域,矩形的长、宽即为目标大小.如图4所示.假设目标对应的空间点为x1,x2,…,xN,大小的具体计算方法为
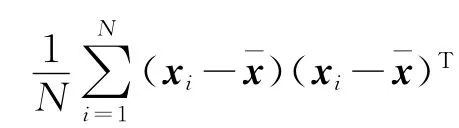
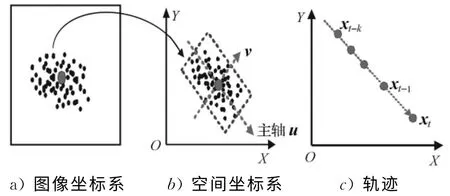
图4 运动态势参数计算示意图
3)航向角 航向角为主轴u 与坐标轴OX之间的夹角,即θ=arctan(uy/ux).

2.5 船舶航迹预控与避碰决策
由上述算法,已经得到了运动船舶在空间中的位置,并且能相应地计算出船舶的大小、航速、航向、船首方向等运动态势信息.
2.5.1 船舶减速制动、倒车时程计算
1)船舶减速制动时程计算 根据Topley船长提出的船舶减速行进距离经验公式[4]

式中:SJ为停车惯性距离,m;V1为船舶停车或抛锚时船速,取3kn;V0为船舶停车初始速度,桥区取10kn;t为船舶停车冲时,按式(8)求取,min;C为船速减半时间常数,按表1 求取,min;冲时T是指从船舶操控制动点开始至惯性消失止所需的时间.可按公式(8)求取[5-7]

式中:V1为船舶在冲程时间内,任意时刻的船速,m/s;Tst为船舶减速时间常数,Tst=C/ln 2,C 可根据排水量查表1取得.
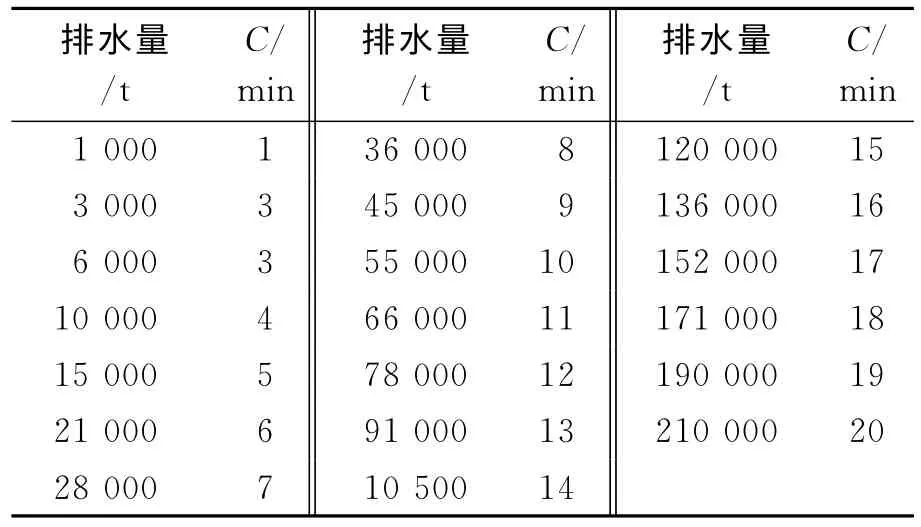
表1 船速减半时间常数C
2)船舶倒车时程计算 倒车冲时和冲程的算式分别为

式中:t为船舶倒车冲时,min;△为船舶排水量,t;V0为船舶倒车初始速度,kn;R0为船舶V0速度下的阻力,kN;SRE为船舶倒车冲程,m.
R0采用经修正的兹万科夫公式求取

2.5.2 船舶拖锚淌航距离计算 根据动能定理,在假定拖锚淌航时锚抓力恒定的情况下,有

式中:Fa为拖锚时锚抓力,kN;ST为拖锚淌航距离,m;m 为船体质量,t;V 为拖锚时船舶余速,m/s.
对式(12)作变换得

式中:△为船舶排水量,t;Fa为拖锚时锚抓力,取9.81kN.
2.5.3 船舶失速漂航距离计算 计算船舶桥区失速漂航冲距Sc来判定船舶离桥梁的危险程度,可为船舶主动避撞桥梁提供理论参考.

从船舶预控安全的角度考虑,可将冲距Sc简化成船舶漂航距离,同时Sc也作为衡量船舶在该距离时与桥梁有碰撞危险的标准距离,即

2.5.4 船舶旋回纵距计算 根据IMO 的设计,设备小组委员会(IMO-DE)对船舶操纵性能进行的研讨,取Ad为4倍的船长作为考核船-桥碰撞的安全距离的上限,即

2.5.5 船舶撞桥危险等级距离标定 引入《国际海上避碰规则》关于碰撞风险的等级术语.将桥墩等效为航道中固定不动船舶,桥区航行船舶与桥墩之间风险等级可以用“碰撞危险”、“紧迫局面”和“紧迫危险”来描述.
1)“碰撞危险”(D1)预判与系统指令
(1)预判 船舶偏离航迹带且船首向异常(即产生过大风流压差角);船舶失控漂移距离Sdrift小于船舶距桥墩距离Sdistance.
(2)系统决策指令 根据航迹偏离量发出操舵指令,利用声光报警提请船舶驾驶人员注意航迹控制以及船舶碰撞桥梁的相关风险.
2)“紧迫局面”(D2)预判与系统指令
(1)预判 满足D2<D1;船-桥纵向距离小于船舶倒车冲程,即D2<SRE.
(2)系统决策指令 船舶主动减速,待船速降至合理抛锚速度抛锚进行拖锚制动.
3)“紧迫危险”(D3)预判与系统指令
(1)预判D3<D2;船-桥纵向距离小于船舶满舵旋回进距Ad,即D3<Ad=4L.
(2)系统决策指令 此时应考虑到组合制动方式,采取满舵旋回并辅以全速倒车,待船速降至合理锚泊速度时迅速拖锚制动的方式进行主动避让.
3 视频检测系统界面
系统在检测到船舶目标后通过视觉几何模型得到船舶在桥区的空间坐标、船舶宽度,船舶长度,船舶速度(速率,方向).同时结合由外界输入的桥区水文、天气情况等诸多参数,结合2.5所作的船舶控制理论得出相应的危险等级和操作指令,并在图5部件4中发出与危险等级相适的操作命令运行实际效果,本文选取了在武汉长江大桥上实拍的3个视频作为检测3组视频分别具有多目标、目标高速运动和目标抵近桥区等特点.

图5 软件系统总体界面
图6中左列为目标检测的结果,右列为地理坐标下的桥区示意图像,其中灰色实心圆示意航道航标、X1,X2,Y1,Y2为警戒区域线,红色框为左图中检测到的船舶在地理坐标下对应的区域.
4 结 论
本文所采用视频目标检测算法,改进了传统的背景建模方法,有针对性地对复杂的桥区背景,传感器抖动,传感器采集图像质量不佳等桥区特殊状况进行设计.结合本文所采用的视觉几何模型,得到了桥区船舶空间坐标等相关参数,为后续的船舶控制提供有效支持.
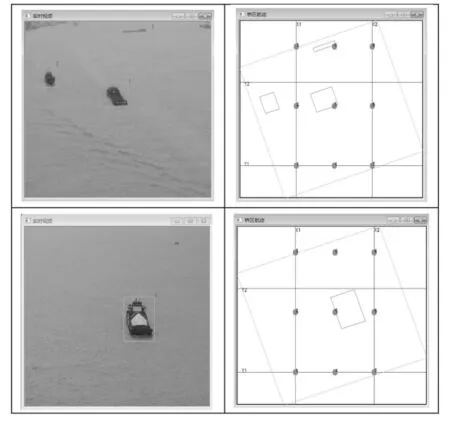
图6 系统测试实例
[1]徐海祥,吴卫国,余晋刚,等.船-桥避碰监测预警系统研究[J].中国安全科学学报,2011,21(7):152-155.
[2]陈香苹,李生红,苏 波,等.基于图像噪声分析的计算机生成图像检测算法[J].Journal of Optoelectronicso Laser,2010,21(2):293-297.
[3]ZHANG Wentao,ZHENG Yuanzhou.Intelligent shipbridge collision avoidance algorithm research based on a modified gaussian mixture model[C]. Multimedia Technology(ICMT),2011International Onference:6414-6419.
[4]赵月林.船舶操纵[M].大连:大连海事大学出版社,2000.
[5]徐言民.基于操纵模拟的桥区水域船舶通航安全预控研究[D].上海:上海交通大学,2010.
[6]SHEIKH Y,SHAH M.Bayesian modeling of dynamic scenes for object detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(11):1778-1792.
[7]STAUFFER C,GRIMSON W.Adaptive background mixture models for real-time tracking[J].Computer Vision and Pattern Recognition,1999(2):246-252.
猜你喜欢
中国科技投资(2023年29期)2023-04-29 05:17:56
弹箭与制导学报(2022年4期)2022-10-12 06:11:52
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
小学生导刊(2018年34期)2018-12-18 01:53:14
科学与财富(2018年7期)2018-05-21 08:46:30
中国船检(2017年3期)2017-05-18 11:33:09
山东青年(2016年3期)2016-02-28 14:25:55
母子健康(2015年1期)2015-02-28 11:21:33
