
基于DSP无刷直流电动机控制系统的研究
2012-06-09 10:25高艳丽张树团
电子设计工程 2012年2期
高艳丽,孙 阳,张树团
(1.海军航空工程学院 控制工程系,山东 烟台 264001;2.海军航空工程学院 新装备中心,山东 烟台 264001)
随着现代电力电子技术的发展,出现了许多高性能功率器件以及新型高性能稀土永磁材料,这些都为无刷直流电机的应用奠定了基础。现今,无刷直流电动机应用的领域非常广泛,如多电飞机燃油系统、多电飞机刹车系统、医疗器械、家用电器等方面的应用,在航空航天等国防工业中也具有越来越广泛的应用[1]。数字信号处理技术DSP及其硬件芯片微处理器技术迅猛发展,它不仅能实现高精度、高可靠性而且能够简化系统结构,增加了系统功能,具有控制灵活,智能水平高,参数易改等特点,所以DSP无刷直流电动机的控制系统运用前景广泛,实用性高。
1 系统原理及构成
无刷直流电动机系统的原理:无刷直流电动机的电磁转矩与电流近似呈线性关系,即改变电流的大小就可改变电磁转矩的大小;电机的转速与反电势为正比关系,由电机反电势和外加电压的平衡关系可以得出,电机转速的改变可以通过调节外加电压来实现,所以只要改变逆变器的占空比就可实现[2]。图1为无刷直流电动机调速系统原理图。
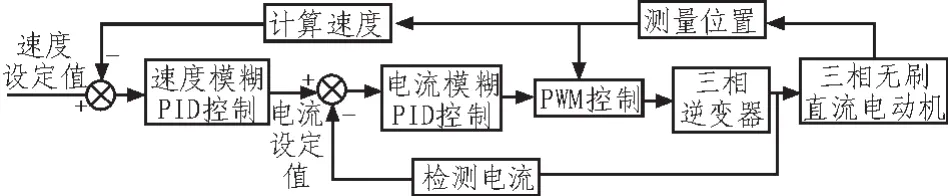
图1 无刷直流电动机调速系统原理图Fig.1 Brushless DC motor speed control system schematic
整个控制系统采用分布式控制,上位机为PC机用来输入和显示速度及电流的设定值,并且实现数据的保存及系统的错误报警,采用VC++程序进行界面设计和编写。下位机采用DSP TMS320F2812,该芯片产生输出PWM信号输入IPM模块,该模块包括三相桥式逆变电路和电流反馈电路,从而驱动电机转动,同时DSP接收电流的反馈信号,与电流设定值进行比较。位置传感器检测电机转子位置,输入到DSP中,并且根据计数器测得电机的转速,构成速度反馈。
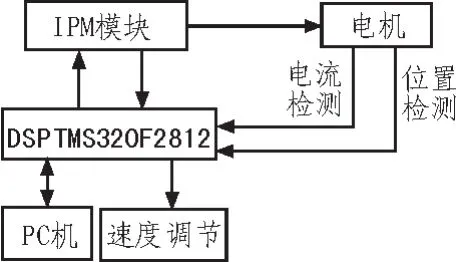
图2 无刷直流电动机控制系统Fig.2 Brushless DC motor control system
2 模糊PID控制
无刷直流电动机是一个多变量、非线性、强耦合的对象,因而单一的运用PID控制算法不能够得到较为精确的控制结果。而模糊控制是依赖于人的经验进行控制,不需要建立被控对象的精确数学模型,针对非线性和时变的系统具有较好的控制能力。在无刷直流电动机控制系统中把模糊控制和PID相结合,不仅可以得到较快的响应速度和参数变化的鲁棒性,而且可以对系统实现较高精度的控制[3]。
本设计中运用的模糊PID控制器包括两个组成部分:PID控制器和模糊控制器。DSP中断过程中采样获取被控制量的瞬时值与所给的参考值相比较,两者之差e即为偏差信号。偏差较大(|e|≥η)时,采用模糊控制;偏差较小(|e|<η)时,采用数字增量式PID控制。这种控制方式既可以利用达到较好的稳态精度,又可以利用模糊控制得到响应的快速性和相应较好的鲁棒性。模糊—PID控制关键是开关阈值η的设定[4]。为了使系统达到最佳效果,开关阈值η可选择经验值,并对其进行在线调整。图3为模糊PID控制器的逻辑关系图。
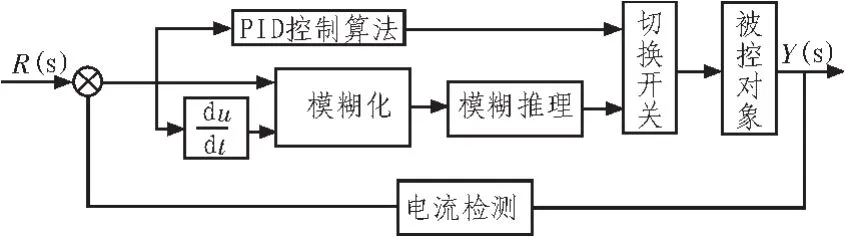
图3 模糊PID控制器的逻辑关系图Fig.3 Fuzzy PID controller logic diagram
2.1 模糊控制器的设计
选择电流偏差E和偏差变化率EC的模糊集合为:{NB,NM, NS, ZE, PS, PM, PB} ,论域为:{-6,-4,-2,0,2,4,6};在一些不确定的状态下可以在线整定模糊控制状态表。表1为控制规则表。
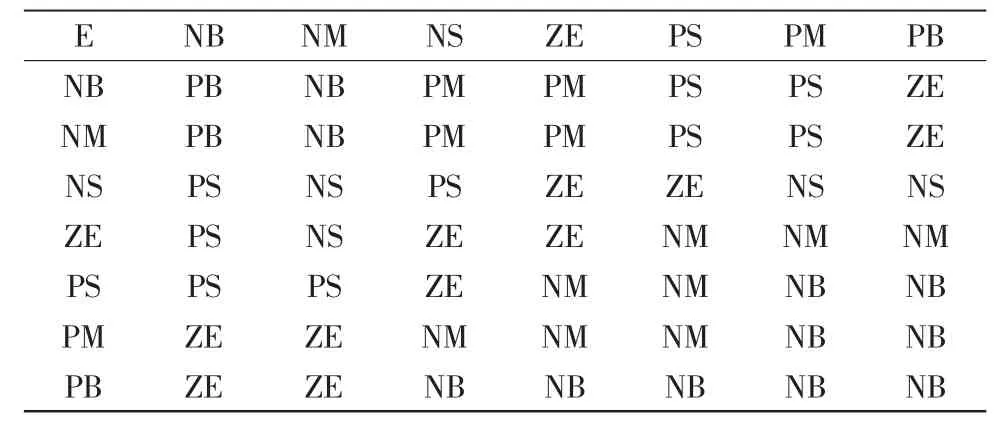
表1 EC控制规则表Tab.1 EC control rule table
各个变量的隶属函数都选用的是灵敏度较高的三角函数,这样可以更加确保模糊控制器有着较高的灵敏度。
2.2 PID控制算法的设计
在小误差(|e|<η)的动态范围内,采取数字增量式PID控制。在工业控制过程中,PID控制可以得到相对满意的控制效果。PID控制算式为:

公式(1)中:u(t)为调节器的输入信号;e(t)为偏差信号,它等于给定量与输出量之差;Kp为比例系数;TI为积分时间常数;TD为微分时间常数。
对公式(1)进行离散化,得到

公式(2)中:u(k)为第 k 时刻的控制输出。
e(k)———第k次采样时刻输入的偏差值;
Kp———比例系数;
TI———积分时间常数;
TD———微分时间常数;
T———采样周期。
3 系统软件设计
电路中采用DSPTMS320F2812来控制有位置传感器无刷直流电动机的调速控制系统。系统CPU时钟频率采用20 MHz[5],并且应用PWM频率为20 kHz。通过定时器至周期匹配事件启动ADC转换,使每个PWM周期都对电流进行一次采样,并在A/D转换中断处理程序中对电流进行调节,来控制PWM输出。转子每转过600机械角就触发一次捕捉中断,进行换相操作和速度计算。图4为控制流程图。
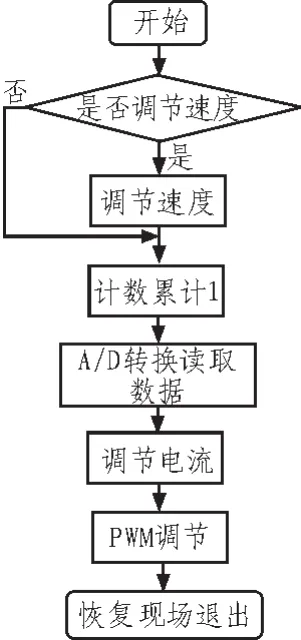
图4 控制流程图Fig.4 Control flow chart
在电流的检测中可以使用旁路电阻来检测相电流。将该电阻放于三相全控功率变换电路的下端功率桥臂与地之间;电阻值的大小可以根据需要而定,一般应该使它可以起到一个功率变换电路的过电流保护作用。电阻上的电压首先经过放大,再送于TMS320F2812上的A/D转换通道,得到合适的电流信号。在A/D转换结束的时候,向CPU发出一个中断请求信号,等待CPU对该电流信号的处理。根据电流误差,选择采用PID控制器还是模糊控制器,从而实现对PWM脉冲的占空比调节[6]。
上位机即PC机,编程软件可以采用VC++。通过程序的编写可以实现人机友好界面,方便操作人员的使用并且能保证系统高效稳定运行。上位机可实现:
1)电动机速度的显示;
2)电流、速度值的输入;
3)实时、动态、直观的显示各参数的变化。
4)可以显示报警画面:当系统出现故障时,工作人员可以通过画面直观的看到报警信号的工号、报警类型、报警时间和当前值,点击报警项就会切换到报警工号对应的操作界面,工作人员可进行相应的修改,当修改结束后报警可以通过复位键进行复位。
5)历史报告画面:可以查询操作人员的操作记录和操作的详细时间,包括系统的启停、各参数修改前和修改后的值等。
6)数据的保存与打印。
4 结 论
本文采用DSP TMS320F2812为核心处理器,并且控制算法上采用模糊PID控制算法来实现电动机速度的调节,实现了对电动机运行的精确控制。在整体控制上采用分布式控制,更加方便了用户对电动机的控制,也使得电动机得以精确运行。
[1]刘增磊,程小华.无刷直流电动机发展与现状[J].防爆电机,2007,3(42):1-5.LIU Zeng-lei,CHENG Xiao-hua.Development and status of brushless DC motors[J].Explosion-proof Motor,2007,3(42):1-5.
[2]张琛.直流无刷电动机的原理及应用[M].北京:机械工业出版社,2004.
[3]卿浩,辜承林,唐小琦.无刷直流电机模糊控制系统的建模及仿真分析[J].微电机,2006(39):19-22.QING Hao, GU Cheng-lin, TANG Xiao-qi.Modeling and simulation analysis of fuzzy control system of brushless DC motor[J].Micro-motor,2006(39):19-22.
[4]金岫,邓志良,张鸿鸣.基于模糊PID控制的同步发电机励磁控制系统仿真研究[J].继电器, 2007,35(19):13-15.JIN Xiu, DENG Zhi-liang, ZHANG Hong-ming.Simulation of synchronous excitation controller based on fuzzy-PID control[J].Relay,2007,35(19):13-15.
[5]苏奎峰,吕强,常天庆,等.TMS320X281XDSP原理及C程序开发[M].北京:北京航空航天大学出版社,2008.
[6]厉虹,陈吴.基于TMS320F2812DSP的无刷直流电机调速系统设计[J].机床与液压, 2009, 37(8):382-386.LI Hong,CHEN Wu.Design of the brushless DC motor speed control system based on TMS320F2812DSP[J].Machine Tool and Hydraulic,2009,37(8):382-386.
猜你喜欢
疯狂英语·新悦读(2022年7期)2022-11-23
北京第二外国语学院学报(2021年2期)2021-08-13
北方人(2021年13期)2021-07-17
制造技术与机床(2017年6期)2018-01-19
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
共产党员(辽宁)(2015年6期)2015-06-07
电源技术(2015年9期)2015-06-05
