
超声电机性能的实验测试研究
2012-06-09 10:25蔡卫刚
电子设计工程 2012年19期
蔡卫刚
(西安航空职业技术学院 电子工程系,陕西 西安 710089)
超声电机(Ultrasonic Motor,USM)技术是振动学、波动学、摩擦学、动态设计、电力电子、自动控制、新材料和新工艺等学科结合的新技术。超声电机不像传统的电机那样利用电磁的交叉力来获得其运动和力矩,而超声电机则是利用压电陶瓷的逆压电效应和超声振动来获得其运动和力矩的,将材料的微观变形通过机械共振放大和摩擦耦合转换成转子的宏观运动。在这种新型电机中,压电陶瓷材料盘代替了许许多多的铜线圈。
超声电动机将电致伸缩,超声振动,波动原理这些毫不相干的概念与电机联系在一起,创造出一种完全新型的电动机。在超声电机中无滑动时,转子的速度由振动速度决定,因此电机的转速一般很低,每分钟只有十几转到几百转,但是,超声电机不用线圈 ,也没有磁铁,结构相体积小,重量轻;与普通电机相比,在输出转矩相同的情况下,可以做得更小,更轻,更薄。 超声电动机靠摩擦力驱动,质量较轻,惯性小,响应速度快,起动和停止时间为毫秒量级。
因此它可以实现高精度的速度控制和位置控制。尽管有这么多鲜明的优点,但从它所应用的角度来看,超声电机仍然是一种执行器,它还远没有达到在开环状态下就能执行精确的速度和位置命令的程度。从控制的难易程度来看,超声电机比电磁电机的控制更难,这是由超声电机的控制变量与转速以及负荷之间的关系所决定的[1-3]。
1 实验测试多自由度电机结构
1.1 多自由度电机结构

图1 多自由度电机的结构Fig.1 Structure of the multi-DOF motor
多自由度电机的结构如图1所示。该电机的定子由一个夹心式弯曲圆环型换能器和一个压电多层振子组成。弯曲换能器由两个圆环型纵振动压电片被基底和铝块夹心而构成。压电片的厚度为2 mm。其外直径和内直径分别为20 mm和10 mm。压电片负方向的电机分别和基底和铝块相连。正电极用砂纸打磨掉,电极x、x′,y和y′被插在两个压电片中间以产生两个方向的弯曲振动。通过选择两个处电极y和y′,可以产生另一个方向的弯曲振动[4]。
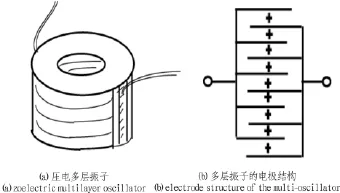
图2 压电多层振子的形状及电极结构Fig.2 Shape and electrode structure of the piezoelectric multi-oscillator
定子竖直方向的纵振动由压电多层振子来产生。其结构如图2所示。振子的外直径为19 mm,内直径为7.4 mm,厚度为5 mm。该振子由50~100层的压电晶片组成。每一层晶片的厚度约为50 μm。该振子的优点是:当工作电压较低时,振子可以在非共振的条件下,在定子表面产生大的纵振动位移。
1.2 多自由度电机的工作原理
由于该电机的纵振动和弯曲振动分别由不同的振子来产生,因而不同的振动模式之间是独立的,不会产生耦合运动。定子有3种振动模式,这3种振动的运动方向是相互垂直的。通过两种运动模式的组合,可以产生转子的三自由度转动。其工作原理如图3所示。利用y方向的二阶弯曲振动和多层振子一阶纵振动的组合,可以产生x方向的转动[3]。在激励时,纵振动激励电压信号的相位和弯曲振动激励电压信号的相位相差900。同理,对于饶y轴的旋转,可以利用x方向的弯曲振动和z方向的纵振动组合来实现。Z轴的旋转可以通过激励两个方向的弯曲振动来实现。多自由度的工作原理如图3所示。
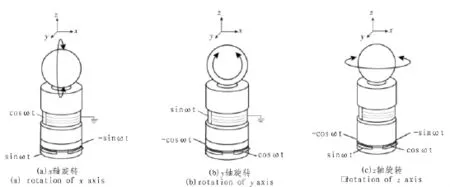
图3 多自由度电机的工作原理Fig.3 Multiple degrees of freedom of the motor working principle
2 不同予应力作用下频率、相位与转速的关系
实验进行时,首先给系统输入信号,通过功率放大器把信号放大再输入到多自由度超声电机,多自由度超声电机的变化情况在旋转编码器的作用下最终通过示波器可以观察出来[5-7]。系统的实验框图如图4所示。
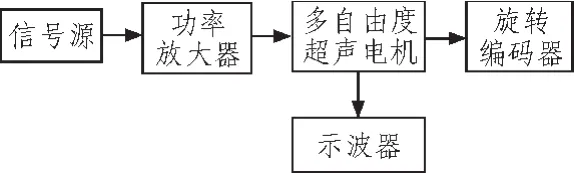
图4 实验测试框图Fig.4 Laboratory testing diagram
2.1 不同予应力作用下,频率与旋转速度的关系
测试条件有以下两个方面:
1)弯曲振动电压:Vpp=250 V
2)相位 900
本实验研究的是在不同予应力作用下,电机的转速随频率的变化关系,实验中,电机的转速可以通过控制频率来控制其转速的大小,但是在予应力不同的情况下,电机能转动起来的频率是不一样的,予应力越大要求能使电机转动起来的起始频率就越高,同时随着转动频率的逐渐增大转动的转数也越来越少,因此,通过控制频率可以控制电 机 转 速[8-9]。
本实验研究的是在不同予应力作用下,电机的转速随频率的变化关系,实验中,电机的转速可以通过控制频率来控制其转速的大小,但是在予应力不同的情况下,电机能转动起来的频率是不一样的,予应力越大要求能使电机转动起来的起始频率就越高,同时随着转动频率的逐渐增大转动的转数也越来越少,因此,通过控制频率可以控制电机转速。
2.2 相位与旋转速度的关系
相位与旋转速度关系的测试条件:
1)纵振动电压 Vpp=10 V
2)弯曲振动电压 Vpp=250 V
3)频率f=23.7 kHz
本实验是研究相位与旋转速度之间的关系,通过改变电机不同时刻的相位来测试其转速,最终通过转速的变化分析相位与转速之间的关系[10]。
图像显示如图5所示由上图可知,电机相位达到一定值之后其转速随相位的逐渐增大而增大,当相位度数达到900时,其转速达到最大值,因此,要改变电机的转速可以通过改变相位改变。
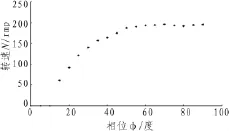
图5 相位随旋转速度的关系Fig.5 Phase relationship with the rotating speed
3 结论
超声电机是一种新型电机,它利用压电材料的逆压电效应,使定子表面产生一定轨迹的微米量级的振动,进而通过摩擦耦合将振动动能转换成转子或滑块的宏观运动(转动或平动)动能[10]。
通过对超声电机的研究,得出超声电机在工作状态下,有很多因素会影响其转速,针对这种情况我们对它进行探索,经过理论与实践的相结合得到影响超声电机。
1)在不同的予应力作用下,电机频率随旋转速度的变化而变化,变化趋势是先随频率逐渐增长到一定的程度后再呈下滑的趋势。
2)超声电机相位也随旋转速度的变化而变化。旋转速度是随相位的逐渐增大而加快,最终当相位达到900 时其旋转速度达到最大值。
[1]张爱民.自动控制原理[M].北京:清华大学出版社,2006.
[2]傅平,郭吉丰,沈润杰.球形行波型超声波电机的驱动数学模型[J].中国电机工程学报,2006,26(23):115-119.FU Ping, GUO Ji-feng, SHEN Run-jie.The driving mathematic model of spherical traveling-wave type ultrasonic motor[J].Proceedings of the Chinese Society for Electrical Engineering,2006,26(23):115-119.
[3]郭吉丰,傅平.多自由度球形超声波电机的研究进展[J].电工电能新技术,2005,24(2):65-68.GUO Ji-feng,FU Ping.The research progress of multidegree of freedom ultrasonic motor[J].Advanced Technology of Electrical Engineering and Energy, 2005,24(2):65-68.
[4]刘俊标,黄卫清,赵淳生.圆柱-球体三自由度超声电机运动机理研究[J].机械科学与技术,2002,21(4):609-611.LIU Jun-biao, HUANG Wei-qing, ZHAO Chun-sheng.Study on the motion mechanism of a cylinder-sphere ultrasonic motor with three-degree of freedom[J].Mechanical Science and Technology,2002,21(4):609-611.
[5]Aoyagi,NakajimaT,TomikawaY,et al.Jpn.J,AppL.Phys.,2004, 43(5):2884-2886.
[6]金龙,胡敏强,顾菊平.一种新型圆柱定子 3自由度球形压电超声电机[J].东南大学学报:自然科学版,2002,32(4):1-4.JIN Long, HU Min-qiang, GU Ju-ping.New type of threedegree of freedom spherical piezoelectric ultrasonic motor with cylinder stator[J].Journal of Southeast University:Natural Science Edition,2002,32(4):1-4.
[7]Purwanto E,Toyama S.Control method of a spherical ultrasonic motor[C]//Proc.of the 2003 IEEE/ASME Inter.Conf.on Anvanced Intelligent Mechatronics,2003:1321-1326.
[8]赵淳生.超声电机在南京航空航天大学的研究与发展[J].振动、测试与诊断,2005,25(3):167-173.ZHAO Chun-sheng.Research on ultrasonic motors in nanjing university of aeronautics and astronautics[J].Journal of Vibration,Measurement&Diagnosis,2005,25(3):167-173.
[9]Tomonobu S,Nakamura M,Urasaki N.Mathematical Model of Ultrasonic Motors for Speed Control[J].IEEE Trans,1998,36(2):290-295.
[10]Senbaru,Nishibara,Nakagami.Speed control of ultrasonic motors by adaptive control with a simplified mathematical model[J].Electr.Apply,1998,145(3):180-183.
猜你喜欢
防爆电机(2021年1期)2021-03-29
压电与声光(2019年1期)2019-02-22
测控技术(2018年2期)2018-12-09
铜仁学院学报(2018年6期)2018-07-05
数学物理学报(2018年1期)2018-03-26
电测与仪表(2016年18期)2016-04-11
电机与控制应用(2015年10期)2015-03-01
物理实验(2015年10期)2015-02-28
电力工程技术(2014年1期)2014-03-20
振动、测试与诊断(2014年6期)2014-03-01
