
基于后端扫描的三维超声成像系统
2012-06-08 11:15齐建陈益民丁明跃尉迟明
中国医疗器械杂志 2012年4期
齐建,陈益民,丁明跃,尉迟明
华中科技大学,武汉,430074
0 引言
在临床诊断领域,超声成像是目前应用最为广泛的一种成像模式。在过去的几十年中,随着科技的发展,超声成像技术取得了长足的发展,从传统的A型、B型、M型和多普勒超声成像模式,进入到目前的三维超声、弹性成像和靶向性造影剂谐波成像。
传统的B型超声成像系统所提供的是人体某一断面的二维图像,医生必须根据自己的经验对多幅二维图像在大脑中进行构建以理解其三维解剖结构。三维超声的概念由Baun和Greewood在1961年提出,他们在采取一系列平行的人体器官二维超声界面的基础上,用叠加的方法获得了人体器官的三维图像[1]。
与二维超声相比,三维超声成像具有以下明显的优势:(1) 图像显示直观;(2)在医学教学和手术规划方面有广泛的应用前景;(3)可进行医学诊断参数的精确测量;(4)可以缩短医生诊断需要的时间。鉴于上述原因,三维超声在疾病的定性、定位及定量诊断中发挥着举足轻重的作用[2]。
当前国内外三维超声图像的获得主要有:基于面阵探头和基于机械扫描的两种方式。
基于面阵探头的三维超声图像的成像模式由Duke大学Vonn Ramm等人提出,图1为面阵超声探头超声换能器排列示意图[3]。
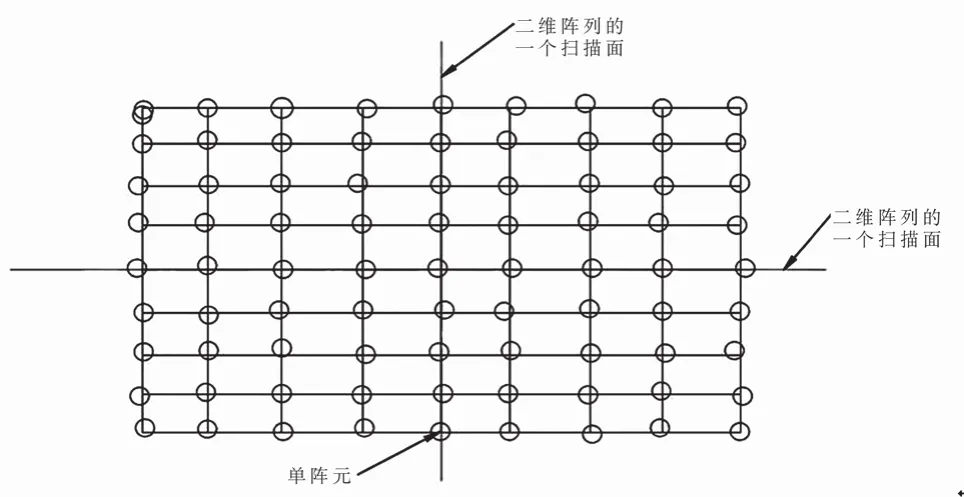
图1 二维面阵超声探头换能器阵列示意图Fig.1 Transducer arrays of 2D planer ultrasound probe
二维面阵探头也就是二维相控阵探头,通过控制二维面阵中的阵元发射超声束并实现空间的偏转,直接采集三维数据。面阵的每一个阵元都配置了相应的延迟线,采集数据时,只要控制不同阵元的延迟时间就能改变波束的指向。二维相控阵超声探头避免了复杂的机械定位装置,采集数据的速度较快,并且较稳定[4]。它能在两个横向方向上聚焦,聚焦声场为针状或棒状,检测的空间分辨率较高,相控阵系统不需要移动探头即可在特定空间自由地实现偏转和聚焦,极大改善了声场的可达性和检测速度。但二维面阵探头的阵元数目大,通道数多,单阵元的尺寸小,加工困难。同时,阵元的灵敏度低,接收到的信号弱且信噪比低。若探头由64×64的阵元组成,通道数变成了4096,技术难度大,不易实现,因此市场上这类探头只有GE,Philips,Siemens等大公司才能生产,且价格较昂贵[5-7]。
基于机械扫描的三维超声图像主要是由一组二维超声数据重建得到的,大致分为图像采集、三维重建和三维图像的显示三个步骤[8]。其中图像的采集是三维成像的关键步骤,直接影响重建结果的优劣。一般来说,二维超声探头被固定在特点装置内,依靠马达驱动超声探头扫描完成数据的采集。对于二维超声探头而言,传统的扫描模式包括平行扫描(又称为线性扫描,图2)、基于前端扫描的扇扫扫描(图3)和旋转扫描(图4)三种方式[8]。其中前两种模式适用于腹部探头,后一种扫描主要适用于腔内探头。
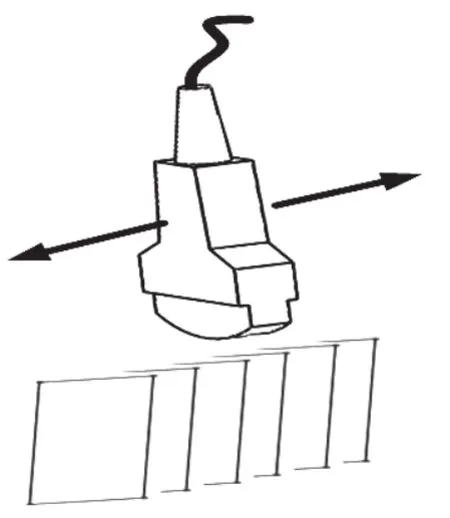
图2 平行扫描Fig.2 Parallel scanning mode
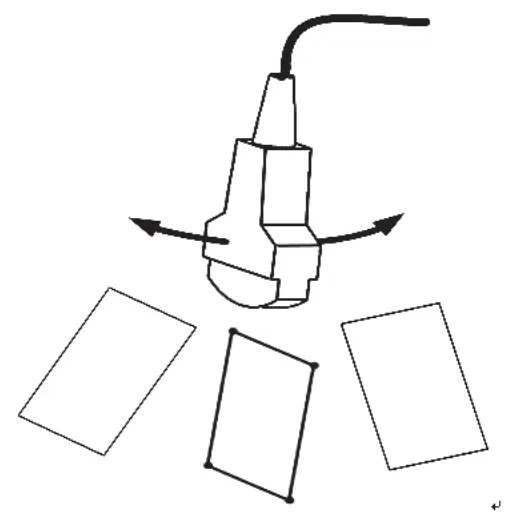
图3 传统扇形扫描Fig.3 Traditional fan-shaped scanning mode
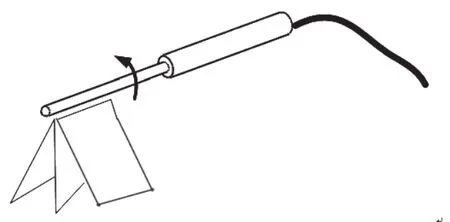
图4 旋转扫描Fig.4 Rotational scanning mode
平行扫描模式获得的每一幅二维图像之间相互平行[8]。扫描时,二维超声探头在马达和机械装置的控制下沿人体体表平行滑动,完成二维超声图像数据的采集。二维探头平行移动的速度和数据采集的抽样率的控制对三维重建结果有很大的影响。基于前端扫描的扇扫获得的图像相互间成等距夹角。扫描时,二维超声探头后端保持固定,前端(超声发射端)扇形旋转采集数据。但当采用上述两种扫描模式对病人胸部脏器扫描时,发射的超声波易被人体肋骨遮挡,影响二维超声图像质量,并造成重建后得到的三维超声图像质量下降[10]。
为了避免扇形扫描和平行扫描模式的缺陷,本文设计了一种后端扫描的扇形扫描(图5),二维超声探头前端固定,后端扇形旋转。在此扫描模式下,如果探头前端置于人体肋骨之间,由超声探头发射的超声束将通过人体肋骨的间隙进入人体,成功采集二维数据且避免了肋骨的影响,极大提高了三维超声图像的质量。
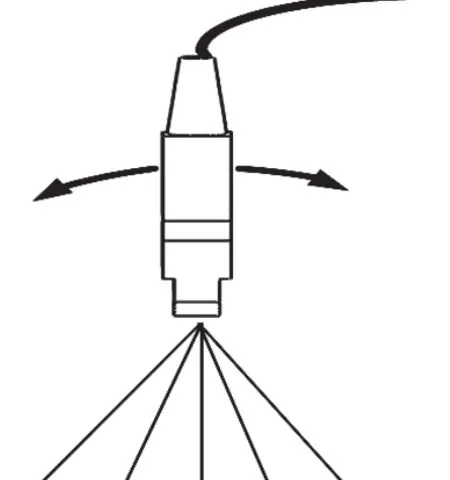
图5 基于后端扫描的三维超声的成像模式Fig.5 Fan-shaped scanning approach based on back-end scanning
1 系统架构
为了验证基于后端扫描模式的有效性,本文搭建了一个包括三维超声图像数据的采集、重建和显示的系统。该系统由机械扫描装置、超声机、工作站(配有图像采集卡的PC机)、单片机驱动控制芯片等构成。工作站和超声机由视频输出线相连接,单片机驱动控制芯片通过串口线和工作站通讯,系统架构示意图如图6所示。
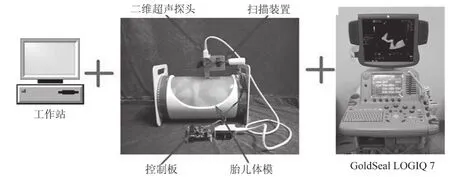
图6 系统架构示意图Fig.6 System structure
以下我们就扫描装置的机械设计,步进电机驱动的硬件设计,三维数据采集和重建结果分别介绍。
1.1 机械装置
机械装置主要包括探头支架、探头夹、弧形导航滑块和弧形齿轮轨道等,如图7所示。装置采用铝质材料加工而成,步进电机固定在探头支架两侧。选择形状、大小、力矩和歩矩角合适的步进电机两台,如宝来公司生产的两相42BY100BX型号的步进电机。探头夹可以进行伸缩,可固定当前市面上的大部分二维超声探头。
为了确保二维超声探头前端固定、后端扫描,设计必须保证机械装置的弧形轨道和弧形齿轮的半径R与探头固定的位置到探头顶端的距离L始终保持相等,如图8所示。此装置设计的扫描范围最大角度为60o。
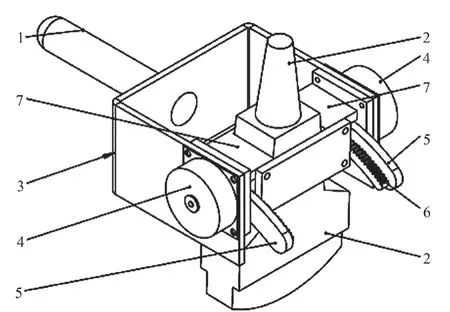
图7 机械装置的整体示意图1手柄;2探头模型;3支架;4步进电机;5弧形导航滑块;6弧形齿轮轨道;7探头夹;Fig.7 Mechanical scanning device: (1)hand shank, (2) mode of the probe,(3)support, (4)stepper moter, (5) the arc navigation slider,(6) the arc gear track, (7) the probe clip
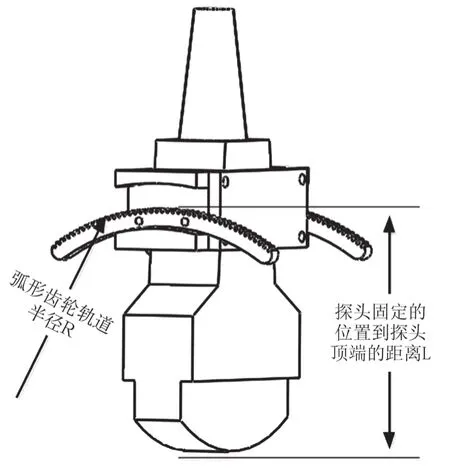
图8 探头与探头夹位置关系Fig.8 The location relations between probe and probe clip.
1.2 步进电机的硬件控制和二维超声数据的采集
二维超声探头由步进电机驱动扫描,其扫描速度和扫描角度通过步进电机单片机控制板细分驱动器和驱动程序控制。为了保证实验过程中数据采集的稳定性,步进电机的控制板由单片机和电机驱动电路组成。上位机PC工作站通过串口将命令传给单片机,单片机将接收到的命令转化为对应的驱动信号输出,该信号进入驱动电路部分,输出步进电机所需要的脉冲驱动信号。
电机控制电路是硬件部分的核心,完成对电机的转动控制,从而对探头的扫描进行控制,此外,控制电路还负责与上位机进行通讯,为上位机提供电机转动的状态。本系统使用的电机采用步进电机,因此采用脉冲方式实现电机的转动控制,通过控制发送脉冲的个数来控制电机旋转的角度,通过改变脉冲的频率来控制电机的速度和加速度。该硬件控制电路主要由电源、单片机系统、光电隔离、电机驱动电路、过流保护电路等几部分构成。
电机驱动电路采用A3977 步进电动机驱动器。此种驱动器以DMOS 为基础的PWM控制全桥驱动器,内置译码器,不需要外接微处理器,可操作双极性步进电机的整步、半步、1/4 步和1/8步模式。
超声机和PC机的图像采集卡通过视频传输线连接,通过编程控制图像采集卡获得超声机的图像并在PC机工作站上显示。PC机和控制板通过串口线通讯。给控制板上电,在串口通讯助手将指令通过串口线传送给单片机,通过驱动部分将驱动信号发送给步进电机,实现二维超声探头的数据扫描和采集。三维超声图像的采集和重建流程如图9所示。首先初始化图像采集卡参数,然后发送扫描开始信号给串口。控制电路接收到开始指令后,电机转动带动探头扫描。控制电路的有效扫描开始信号,通过串口回传给工作站程序,工作站程序控制数据采集卡开始进行循环采集数据到内存,直到从串口接收到有效采集停止信号为止。记录下采集的二维图像数据序列的帧数并置于内存中,用于三维重建。本系统的三维重建采用本实验室自主开发的三维重建库和DLL完成的。
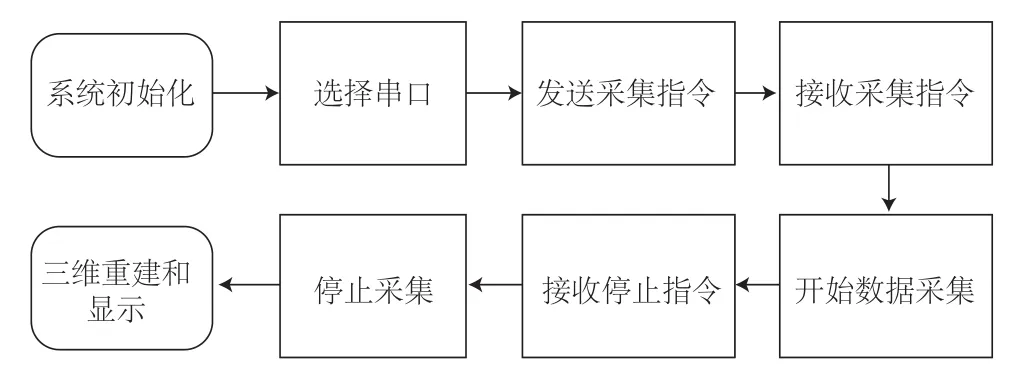
图9 二维超声数据的采集和重建流程图Fig.9 The flow chart of 2D data’s acquisition and reconstruction
2 实验结果
本文中,应用基于后端扫描的三维超声成像系统,分别以胎儿体模和真人为实验对象,做扫描实验,采集二维数据并进行三维重建。步进电机开始和结束工作时,因电机转速等原因工作不稳定,因此对此阶段超声探头扫描得到的二维数据不进行采集。经计算,得到的有效扫描角度为58.8o,所以三维图像的重建角度亦定为58.8o。
图10体模中胎儿的大小为36周,图10a所示为胎儿面部三维重建后的结果,图10b为对胎儿整体扫描得到的重建结果。
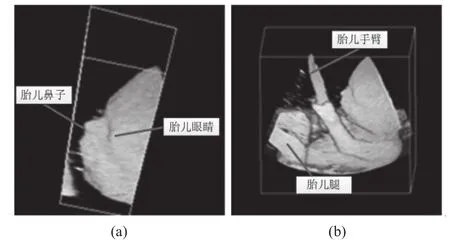
图10 以胎儿体模为对象做扫描实验的重建结果Fig.10 The reconstruction results of fetus
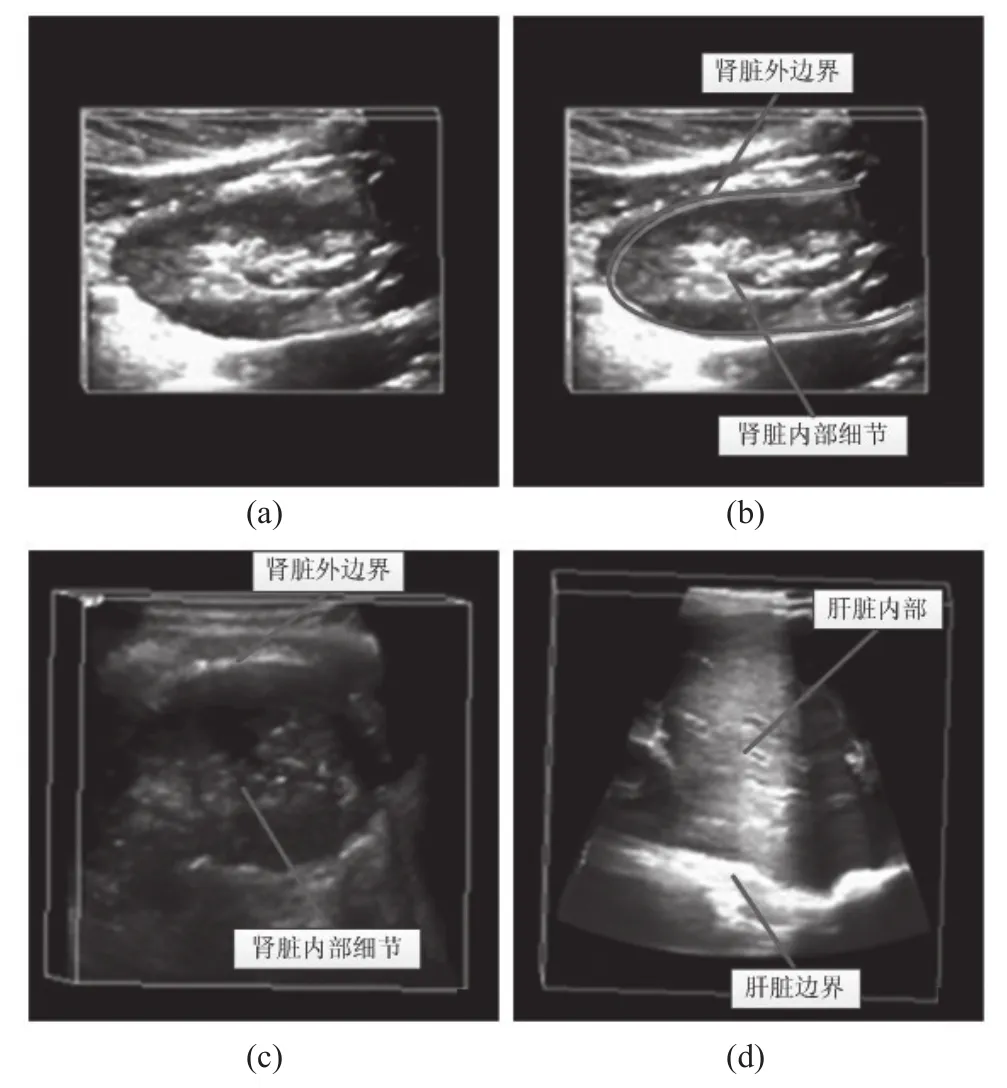
图11 以人体肾脏和肝脏为对象做扫描实验的重建结果Fig.11 The results of human’s liver and kidney
实验对象为一成年男子,身体健康,年龄28周岁,身高170 cm,体重65 Kg。图11的(a)、(b)、(c)为该男子左肾的扫描重建图像,图11 d为肝脏扫描重建结果。扫描时,二维超声探头前端固定于人体两肋骨之间。
3 结论和展望
本文从机械扫描装置的设计到步进电机的控制,搭建了一套基于前端固定后端扫描的扫描模式的三维超声成像系统,先后对胎儿体模和成人做了扫描重建实验,成功的采集了一系列的二维超声图像数据,并各自实现了三维重建和显示。
根据二维数据的重建结果可以看出,实验结果与实验对象的现实形状参数尚有一定的差异(主要是重建面被拉伸变形),这与数据采集过程的稳定性和精确性有关。数据采集过程中,需要探头支架保持平稳不动,但操作人员人很难做到理想的相对静止,此外,采集对象身体的运动(如呼吸)等也会影响数据采集的精确性。
为了完善此三维超声成像系统,得到更精准的三维超声图像,后续工作将从提高电机控制稳定性,减小机械扫描装置体积,增大二维超声探头的扫描范围,以及三维显示的参数设置优化等方面进行完善和改进。
[1]Detmer, Lipscomb K, Blomqvust CG, et al.3D Ultrasound Image Feature Localization Based on Magnetic Scanhead Tracking In vitro Calibration and Validation[J].Ultrasound in Med & Biol,1994, 20(9): 923-924.
[2]郝晓辉, 高上凯, 高小榕, 等.一种基于不规则采样平面的超声三维图像重建方法, 清华大学学报(自然科学版), 1999, 39(9): 9-13.
[3]Smith Stephen E, Ramm Vonn.High-speed ultrasound volumetric imaging system-part i: Transducer design and beam steering[J].IEEE Trans of Ultrason Ferrolec Frep contr, 1991, 38(2): 100-115.
[4]高上凯.医学成像系统[M].北京: 清华大学出版社, 2000
[5]Lopes R T, Valent e C M , De Jesus E F O, et al.Detection of paraffin deposition inside a draining tubulation by the compton scattering technique[J].Appl Radiat Isot, 1997, 48(10-12) : 1443-1450.
[6]Cao ZJ, Fery E C, T sui B M W.A scatter model parallel and converging beam SPECT based on the KleinNishina formula[J].IEEE Transaction on Nuclear Science, 1994, 41(4) : 1594- 1599.
[7]Hanke R, Bobel F.Determination of material flaw sizeby intensity evaluation of polychromatic Xray transmission[J].NDT & E International, 1992, 25( 2) : 87-88.
[8]Aaron Fenster, Dónal B Downey, H Neale Cardinal.Threedimensional ultrasound imaging[J], Phys Med Biol.46 2001,46:67–99.
[9]D.H.Pretorius, T.R.Nelson.Three-dimensional ultrasound[J].Ultrasound in Obstetrics and Gynecology, 1995, 5: 219-221.
[10]M.S.Kavic, Three-dimensional ultrasound, New technology[J].Surg Endosc, 1996, 10: 74-76.
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
软件(2020年3期)2020-04-20
电子制作(2019年13期)2020-01-14
铁道通信信号(2019年4期)2019-10-10
电子制作(2019年15期)2019-08-27
制造技术与机床(2019年7期)2019-07-22
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
腹腔镜外科杂志(2016年12期)2016-06-01
