反潜巡逻机空投鱼雷攻潜作战效能分析
2012-05-28 03:08:18徐以成孙明太李居伟
水下无人系统学报 2012年4期
徐以成, 孙明太, 李居伟
反潜巡逻机空投鱼雷攻潜作战效能分析
徐以成, 孙明太, 李居伟
(海军航空工程学院 青岛分院, 山东 青岛, 266041)
结合反潜巡逻机使用空投鱼雷攻潜作战的过程, 探讨了空投鱼雷攻潜作战的各主要影响因素, 分析了目标定位的散布误差以及空投鱼雷入水的散布规律。根据自导鱼雷的工作原理, 给出了目标检测模型和命中判定模型, 阐述了反潜巡逻机使用空投鱼雷攻潜的基本方法以及投雷参数的解算方法。采用蒙特卡洛法仿真分析了各影响因素与命中概率的关系, 得出的结论可为反潜巡逻机空投鱼雷攻潜作战提供参考依据。
空投鱼雷; 反潜巡逻机; 命中概率; 仿真
0 引言
在现有的航空反潜兵力中, 反潜巡逻机以机动性强、航程远、留空时间长、承载多种搜潜设备和攻潜武器等优势[1], 成为各国普遍重视和大力发展的反潜力量。空投鱼雷是包括反潜巡逻机在内的现役反潜机所携带的主要攻潜武器之一, 在搜潜定位、鱼雷种类数量和攻击方式上, 都有其特点规律。本文深入分析了反潜巡逻机使用空投鱼雷攻潜作战的各主要影响因素, 结合航空自导鱼雷的工作原理, 阐述了反潜巡逻机使用空投鱼雷攻潜作战的原理和战术方法。利用计算模拟法, 仿真计算了攻潜作战的各因素对鱼雷命中概率的影响, 并给出了仿真结果分析, 可为反潜巡逻机空投鱼雷攻潜作战提供理论依据。
1 目标潜艇散布
目标潜艇的散布包括位置、航速和航向等误差, 主要是由搜潜定位设备的定位误差引起的。反潜巡逻机用于引导鱼雷攻击的定位设备主要是声纳浮标和磁探仪, 其中声纳浮标主要用于前期搜索、识别和定位目标, 磁探仪主要用于攻击前对目标进一步的确认和定位。

2 鱼雷入水散布
空投鱼雷入水散布(见图1) 主要取决于降落伞参数误差、鱼雷参数误差、投放条件误差, 以及风的影响等。上述诸多因素最终都可以归结为反潜机的飞行高度和速度对鱼雷入水散布的影响, 故空投鱼雷入水概率偏差通常都是关于高度和速度V的函数, 即E=aH+bV, 鱼雷在水平面的散布均方差可按照如下的方法确定。
图1 鱼雷入水散布示意图
由于入水条件的限制, 反潜巡逻机投雷高度一般要求在200 m以下[2], 在400 m以下投雷时,投雷方向和垂直方向的散布偏差E,E为
式中:为投雷速度;V为投雷速度。
根据正态分布概率偏差和均方差的关系[3], 有

进而得到
需要指出的是, 在深度方向上空投鱼雷同样存在散布, 但通常现在鱼雷工作深度一般都能够达到潜艇的航行深度, 而鱼雷和目标在深度方向上的散布误差很有限, 且自导鱼雷在垂直面上的搜索宽度很宽, 故其在深度方向上发现捕获目标的概率一般都接近100%[4]。因此, 空投自导鱼雷在深度方向上的散布问题在多数情况下可不考虑, 这样做的效果与实际情况差别不大。
3 鱼雷攻潜命中判定
3.1 目标检测模型
鱼雷发现和识别目标是通过自导系统对目标进行检测判断的, 包括各种控制逻辑、噪声检测门限和幅度检测门限等。这些检测是以声纳方程为基础的扇面检测, 受到水文条件、目标反射特性、目标舷角、目标方位、声自导系统发射周期变化等因素影响。
根据鱼雷声自导工作原理, 声纳方程分为被动声纳方程、混响掩蔽下的主动声纳方程和噪声掩蔽下的主动声纳方程[5]


3.2 捕获(发现)判定条件
如图2所示, 在某一时刻的鱼雷位置点(x,y)与目标位置点(x,y), 当目标位置点和鱼雷位置满足下列关系即可捕获(发现)目标。
<R且<(6)

3.3 命中判定条件
对于自导鱼雷来说, 自导系统捕获目标只是命中的前提条件。鱼雷还要跟踪追击目标, 鱼雷从开始有动力工作到搜索发现目标, 再到追上目标, 只有消耗于搜索和追踪的航程小于鱼雷总动力工作航程, 方能命中目标。因此, 综合可得其命中判定模型
图2 自导鱼雷捕获判定示意图
式中:sou为鱼雷搜索(再搜索)段的航程;zhui为鱼雷尾追攻击段的航程;zong为鱼雷总动力工作航程;D为鱼雷发现目标时的距离;Q为鱼雷发现目标时的目标舷角;为目标与鱼雷的速度比。
4 反潜巡逻机鱼雷攻潜的基本方法
4.1 鱼雷攻击的基本过程
由于巡逻机不能悬停, 故只能飞行投雷, 发现目标时其航向与攻击航向通常不一致, 需要转弯才能转至攻击航向, 其飞行投雷的几何关系见图3。
图3 反潜机飞行投雷几何关系图


4.2 投雷参数解算
从图3可得, 鱼雷在点的坐标(x,y)为
进而得到如下方程组

如果要求反潜机攻击以角度Q进入攻击, 只需在方程组(13)中加入下式

5 仿真计算结果及分析
5.1 仿真条件
假设反潜巡逻机以两型鱼雷(以鱼雷和鱼雷分别指代)为攻潜武器, 鱼雷主动自导作用距离1 500 m, 鱼雷主动自导作用距离750 m, 两型鱼雷航速均为40 kn。反潜巡逻机投雷飞行高度为150 m, 飞行速度320 km/h。以命中概率作为鱼雷攻潜作战效能的评估指标, 采取蒙特卡洛法进行模拟计算[3], 仿真次数取5 000次, 仿真结果及分析见5.2节。
5.2 仿真结果及分析
当V为10 kn时, 如图4所示。由图4可知, 两型鱼雷的命中概率都随着定位精度的降低而减小, 这与常识是相符合的。而在同样的定位精度下, 鱼雷命中概率大于鱼雷, 这是因为鱼雷的自导作用距离是鱼雷的2倍以上, 性能较为优越的缘故。
图4 目标初始位置散布与命中概率的关系


图5 鱼雷自导开机位置与命中概率的关系
图6 目标运动方向侧视图

图7 垂直目标运动方向侧视图
图8 鱼雷攻击角度与命中概率的关系
图9 飞行速度及高度与命中概率的关系
当以鱼雷作为攻潜武器时, 如图10所示。由图10可知, 通常命中概率随着目标航速的增大而减小(尤其目标航速30 kn以上), 但在目标航速很低时(5 kn以下)则恰好相反。这是因为目标航速太高, 鱼雷会因追踪航程不足而无法命中目标; 目标航速太低时, 由于运动缓慢, 其进入鱼雷自导作用范围所需的时间很长, 使鱼雷不能发现目标或太晚发现目标, 反而降低了命中概率。
图10 目标速度与命中概率的关系
当V为10 kn, 鱼雷自噪声为50 dB, 鱼雷以主动方式工作时, 如图11和图12所示。由图11和图12可知, 当目标采取水声干扰时, 鱼雷自导作用距离随之降低, 干扰噪声级越大, 自导作用距离越小, 命中概率随之明显减小。
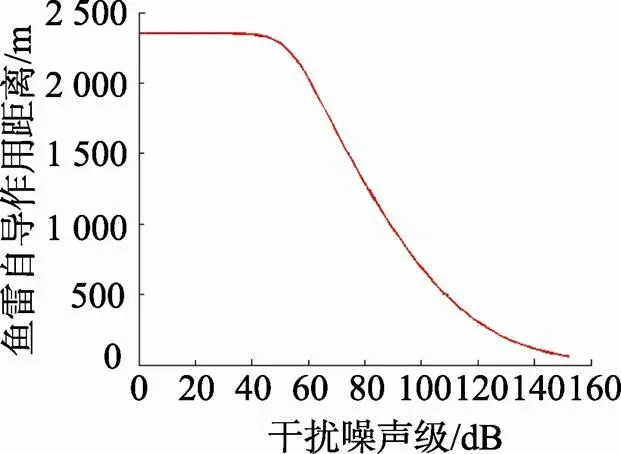
图11 干扰噪声级与自导作用距离的关系
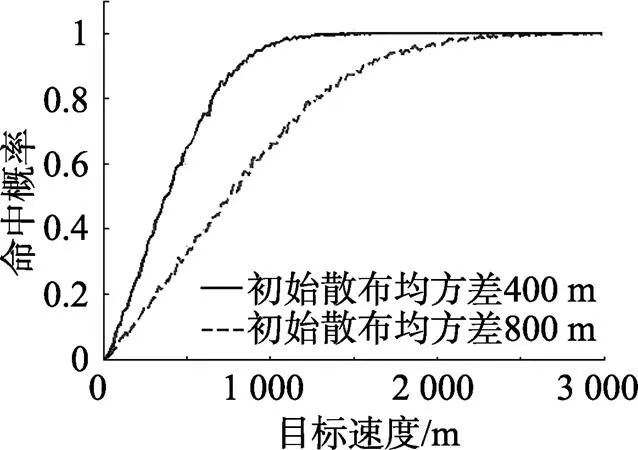
图12 自导作用距离与命中概率的关系
6 结束语
反潜巡逻机使用空投鱼雷攻潜作战受搜潜定位、鱼雷投放误差和鱼雷自导工作性能等诸多因素的共同影响, 依据本文的仿真结果和分析, 可以针对实际作战背景环境, 选择合理的鱼雷、投放位置及投雷时机等攻潜战术, 以取得尽可能好的作战效果。
[1] 屈也频. 反潜飞机搜潜效能评估与决策建模[M]. 北京: 国防工业出版社, 2011.
[2] 杨世兴, 李乃晋, 徐宣志. 空投鱼雷技术[M]. 昆明: 云南科技出版社, 2000.
[3] 康崇禄. 国防系统分析方法[M]. 北京: 国防工业出版社, 2003.
[4] 孟庆玉, 张静远, 宋宝维. 鱼雷作战效能分析[M]. 北京: 国防工业出版社, 2003.
[5] 刘伯胜, 雷家煜. 水声学原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 1993.
[6] 孙明太. 航空反潜战术[M]. 北京: 军事科学出版社, 2003: 145-146.
Analysis of Operational Efficiency for Airdropped Torpedo on Anti-submarine Patrol Aircraft
XU Yi-cheng, SUNMing-tai, LI Ju-wei
(Qingdao Branch, Naval Aeronautical Engineering Institute, Qingdao 266041, China)
This paper discusses the main influencing factors on attacking submarine operation by an airdropped torpedo from an anti-submarine patrol aircraft, and analyzes the target location dispersion error and the water entry dispersion law of an airdropped torpedo. According to the working principle of a homing torpedo, a target detection model and a hitting judgment model are established, and the fundamental method for an anti-submarine patrol aircraft to attack submarine with an airdropped torpedo and the parameter solution method of dropping torpedo are introduced. and the relations between hit probability and the influencing factors are analyzed by using Monte Carlo simulation method.
airdropped torpedo; anti-submarine patrol aircraft; hit probability; simulation
TJ630
A
1673-1948(2012)04-0301-05
2011-10-27;
2011-11-18.
徐以成(1983-), 男, 在读硕士, 研究方向为航空反潜战术.
(责任编辑: 许 妍)
猜你喜欢
智能计算机与应用(2021年5期)2021-10-05 12:45:18
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
现代防御技术(2019年1期)2019-03-12 02:35:14
数字海洋与水下攻防(2018年2期)2018-11-08 01:01:42
电子测试(2018年14期)2018-09-26 06:04:12
无人机(2018年6期)2018-09-10 02:09:40
军事运筹与系统工程(2017年1期)2017-07-31 18:19:00
计算机测量与控制(2017年6期)2017-07-01 16:23:53
火控雷达技术(2016年2期)2016-02-06 02:29:03