基于航行时间的水下航行体可靠度评定方法
2012-05-28 03:08周春明
水下无人系统学报 2012年4期
周春明, 吕 宏
基于航行时间的水下航行体可靠度评定方法
周春明1, 吕 宏2
(1. 昆明船舶设备研究试验中心, 云南 昆明, 650051; 2. 昆明理工大学 机电学院, 云南 昆明, 650093)
针对现有水下航行体实航工作可靠度评定方法的局限性, 根据实航试验所获取航行时间、成败试验结果的数据特点, 将指数分布与二项分布结合起来, 建立了水下航行体实航工作可靠度的等效评定方法, 解决了现阶段水下航行体实航工作可靠度评定方法中缺失规定时间的问题, 拓展了试验数据的利用效率, 可客观评价水下航行体的实航工作可靠度, 评定结果更接近实际。
水下航行体; 实航工作可靠度; 等效评定方法
0 引言
产品的可靠性是指产品在规定的使用条件下和规定的时间内完成规定功能的能力。基于可靠性的定义, 完整、客观描述水下航行体的实航工作可靠度, 必须描述规定的实航工作时间、工作环境和功能3个要素。在水下航行体的实航可靠性工程实际中, 实航工作可靠度是非常重要的可靠性指标之一, 但在试验考核中, 对实航工作可靠度3个要素的描述, 特别是“规定的实航工作时间”的描述是不确定的。主要原因是: 一方面, 由于水下航行体结构复杂, 功能多, 再加之受试验考核条件的限制, 不同项目的实航工作时间差异相当大, 长短实航时间之差能达到数十倍; 另一方面, 由于航行体位于水下, 无法适时检测其工作的情况, 一般来说其出现的故障时刻是无法知道的, 这也给水下航行体实航工作可靠度的评定带来了难度。传统的水下航行体实航工作可靠度评定方法采用了简化方法, 不考虑实航时间和故障时间, 根据各条次试验的成功与失败结果, 用二项分布进行实航工作可靠度的评定, 评定结果与实际结果出入较大[1]。为了解决不同实航工作时间下的评定问题, 开展了不同评定方法的研究, 比较典型的有“按成败型-指数型串联综合评定的方法”[2], 但这种方法仅解决了实航时间的问题, 同时降低了试验样本量的使用效率。本文将指数分布与二项分布结合起来, 建立了水下航行体实航工作可靠度的等效评定方法, 这种评定方法具有较强的理论依据和工程运用价值, 操作方便, 便于工程使用, 同时充分运用了实航试验时间信息, 拓展了试验数据的利用效率, 评定结果更接近实际。
1 评定方法
1.1 评定思路
同一产品的实航工作可靠度是固定的, 与评定方法无关, 无论用什么方法进行评定, 结果都是一致的。假定用A方法和B方法对同一水下航行体的同一实航试验数据进行评定, 其实航工作可靠度的点估计值和置信下限值是一致的, 用公式表示为
式中:A和AL分别为A方法评估的点估计值和置信下限值;B和BL分别为B方法评估的点估计值和置信下限值。
基于这种思路, 将指数分布与二项分布结合起来, 建立了实航工作可靠度的等效评定方法。
经研究认为, 水下航行体是机电一体的产品, 其工作的失效时间符合指数分布, 在实航试验过程中, 尽管无法知道故障的具体时刻, 但其肯定在实航时间内, 为此, 可根据实航时间和试验的成败结果构造似然函数, 用极大似然估计获得指数分布参数的点估计值和相应的工作可靠度点估计值。同时, 基于成功与失败结果, 在实航工作时间和出现故障时间不确定的情况下, 用二项分布较容易评估水下航行体可靠度的点估计值和置信限, 2种方法评估的可靠度结果应是一致的, 由此可求出实航等效工作时间和指数分布参数的置信限, 最后用指数分布估计方法, 计算规定实航工作时间的可靠性点估计值和置信限。
1.2 评定方法
1.2.1 实航试验数据
水下航行体进行了次实航试验, 在次试验中, 水下航行体未能完成规定的功能或出现故障; 在次试验中, 鱼雷完成了规定的功能或试验成功。在试验过程中无法检测其工作状态, 试验停止后进行检测。假定水下航行体未能完成规定的功能或故障的次试验, 实航试验时间分别为t1,t2, …,t, 但不知其具体故障的时间; 水下航行体完成规定的功能或试验成功的次试验, 实航试验时间分别为t1,t2, …,t。水下航行体实航试验及检测如图1所示, 图中带×为未能完成规定的功能或故障的试验, 其余为完成规定的功能或试验成功的试验。
图1 实航试验及检测图
1.2.2 指数分布评定方法
极大似然估计的基本思想: 样本来自于总体, 因此在一定程度上能够反映总体的特征。如果仅在一次试验中就得到了样本的观测值, 那么即可证明该事件发生的概率很大, 因此, 如果总体的待估参数在一切可能值中, 选取一个使样本观测值结果出现的概率达到最大的值作为估计值, 这就是极大似然估计[3]。
对于参数为的指数分布, 其概率密度函数
式中:()为指数分布概率密度函数;为指数分布中的待估计参数。
则一次水下航行体试验在实航时间(0,t)内失效的概率
次水下航行体失效概率
则一次水下航行体试验在实航时间(0,t)内的成功概率
个产品成功概率
则似然函数

式中:()为似然函数;为常数。
对式(7)两边取对数和求导数, 得似然方程

1.2.3 二项分布评定方法
根据水下航行体的实航试验的成功与失败结果, 用二项分布进行点估计值和置信度为时的置信下限值的评估, 计算公式[4]
式中:为可靠度点估计值;R为可靠度置信下限值;为置信度;为试验成功数;为试验失败数;为试验次数。
1.2.4 等效评定方法
指数分布和二项分布2种方法评估的可靠度点估计值和置信度为时的置信下限值应是一致的, 式(9)与式(11)相等, 式(10)与式(12)相等, 则有
式中:t为等效实航工作时间。
求解式(13)得t和λ, 将其代入式(9)和式(10)中得到给定时间的可靠度值
2 算例
2.1 实航试验结果
水下航行体实航试验共进行30次, 实航试验结束后, 经判定成功28次, 失败2次, 实航试验时间各不相同, 试验结果及实航试验时间如表1所示。
分析表1数据, 实航试验时间平均值为935 s,标准差为932 s, 最小值为5 s, 最大值为3 286 s, 极差达3 281 s, 最大值是最小值的657倍。为直观观察试验时间的差异性, 将试验时间用序列图和直方图表示, 如图2和图3所示。
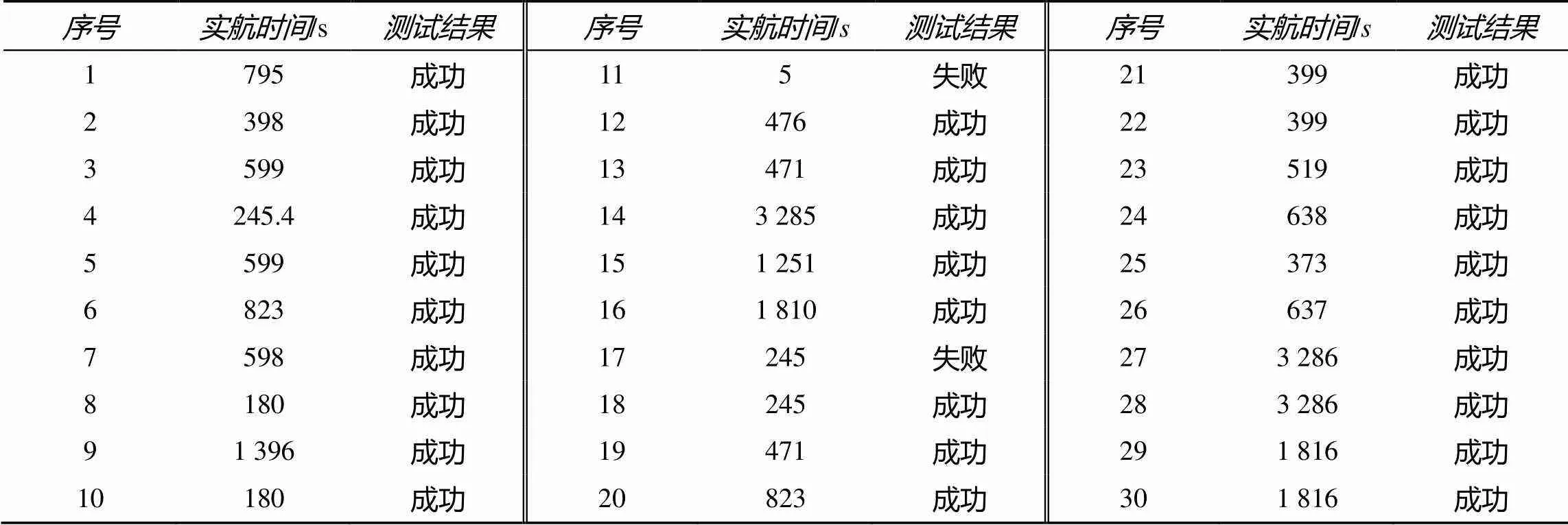
表1 实航试验数据表
2.2 实航可靠度评定结果
将表1所示数据代入前述所示的相应计算公式中, 得到计算结果如表2所示。分析表2评定结果可知, 等效法评定结果与时间相关, 解决了时间相关的影响, 可将短时间试验数据向长时间评定拓展, 传统的二项分布法与时间无关, 描述模糊, 与可靠度定义不符。
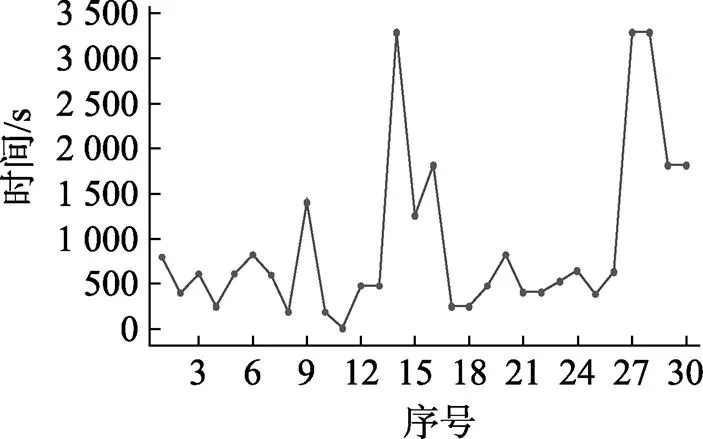
图2 实航试验时间序列图
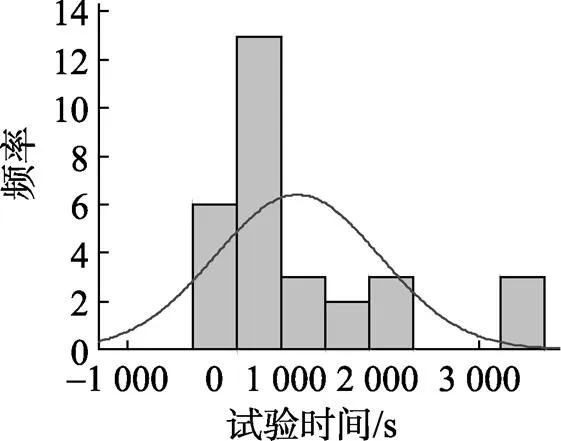
图3 实航试验时间直方图
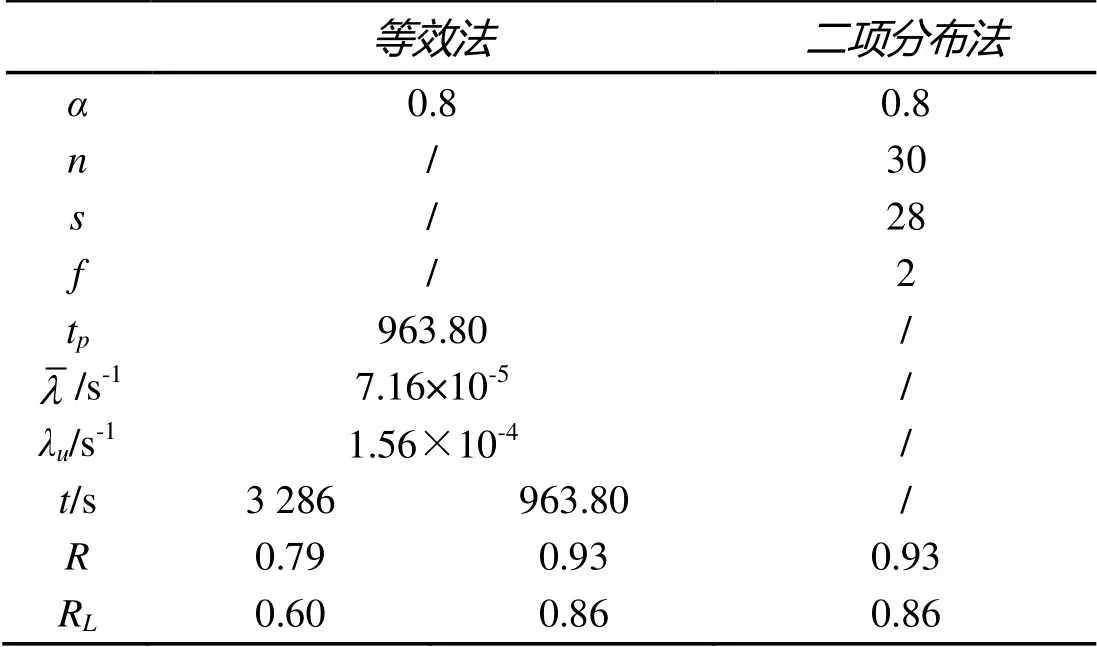
表2 实航可靠度评定结果表
3 结束语
水下航行体实航工作可靠度的准确定义和客观评价对水下航行体的研制、生产和使用都具有现实指导意义。现阶段采用的简化方法, 不考虑实航工作时间的长短和故障发生时间, 仅基于成功与失败结果, 用二项分布评估水下航行体的实航工作可靠度点估计值和置信限, 与可靠度的定义相比, 规定的时间未能定义, 其评定结果是模糊的。本文基于实航试验时间, 将指数分布和二项分布相结合, 建立了等效评定方法, 具有较强的理论依据, 操作方便, 便于工程使用。
[1] 孟庆玉, 周徐昌. 鱼雷可靠性工程基础[M]. 武汉: 海军工程学院, 1998: 289-291.
[2] 贺成刚, 叶豪杰, 张迪. 一种改进的鱼雷实航工作可靠度评定方法[J]. 鱼雷技术, 2011, 19(6): 411-414. He Cheng-gang, Ye Hao-jie, Zhang Di. An Improved Method for Evaluating Torpedo′s Working Reliability in Sea Trial[J]. Torpedo Technology, 2011, 19(6): 411-414.
[3] 赵宇, 杨军, 马小兵. 可靠性数据分析教程[M]. 北京: 北京航空航天大学出版社, 2009: 74-76.
[4] 周源泉, 翁朝曦. 可靠性评定[M]. 北京: 科学出版社, 1990: 62-63.
A Reliability Evaluation Method for Underwater Vehicle Based on Running Time
ZHOU Chun-ming1, LÜ Hong2
(1. Kunming Shipborne Equipment Research & Test Center, Kunming 650051,China; 2. Faculty of Mechanical Electrical Engineering, Kunming University of Science and Technology, Kunming 650093, China)
To improve the existing evaluation method of running working reliability for an underwater vehicle, an equivalent evaluation method of running working reliability for an underwater vehicle is proposed by combining binomial distribution and exponential distribution according to the data of running time and success/failure data obtained from sea trial. The proposed method can solve the problem of lack of given time in the existing evaluation method, improve test data utilization, evaluate the running working reliability of an underwater vehicle more objectively and accurately.
underwater vehicle; running working reliability; equivalent evaluation method
TJ630.1
A
1673-1948(2012)04-0241-04
2012-03-27;
2012-05-08.
周春明(1962-), 男, 研究员, 主要从事质量、可靠性及试验分析评估工作.
(责任编辑: 陈 曦)
猜你喜欢
中国钢铁业(2022年8期)2022-12-21
中国钢铁业(2022年7期)2022-12-21
中学生数理化(高中版.高二数学)(2022年5期)2022-06-01
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
中学生数理化·高三版(2021年3期)2021-05-14
中学生数理化·高一版(2019年12期)2019-12-31
青年生活(2019年21期)2019-10-21
科教导刊·电子版(2019年12期)2019-06-12
火力与指挥控制(2017年7期)2017-08-28