一种改进的水下运动目标远航程导航定位方法
2012-05-28 03:05杜召平刘百峰
水下无人系统学报 2012年4期
杜召平, 刘百峰, 赵 晔
一种改进的水下运动目标远航程导航定位方法
杜召平, 刘百峰, 赵 晔
(中国人民解放军91388部队, 广东 湛江, 524022)
当前水下运动目标定位主要采用船载水听器基阵-声信标跟踪定位方法和船拖水听器基阵-声信标跟踪定位方法, 但这两种方法存在跟踪定位精度较低、实施难度大以及设备维护修理困难等问题。基于此, 提出了采用水下目标加装光纤陀螺仪-差分全球定位系统(DGPS)组合制导技术, 以实时测量、记录水下目标的航行姿态、航行速度和位置坐标, 通过编码把目标的位置坐标数据实时转换为同步水声多频多脉冲时延编码信号发射, 利用船拖水听器测量水声多频多脉冲时延编码信号, 通过船载基站实时解算, 从而实现指引测控船完成远航程水下目标的实时跟踪、定位、监测任务。试验结果表明, 该方法可有效实现对远航程水下目标的跟踪定位和实时监测。
水下运动目标; 水听器基阵; 声信标跟踪定位; 水声多频多脉冲时延编码信号; 远航程
0 引言
目前主要采用船载水听器基阵-声信标跟踪定位方法和船拖水听器基阵-声信标跟踪定位方法对远航程水下目标实现跟踪定位, 并实时测量、解算目标的位置坐标和航行轨迹。
船载水听器基阵-声信标跟踪定位方法是通过船载水听器基阵测量目标声信标的pinger信号, 利用同步球面交汇算法或异步双曲面交汇算法解算出目标的位置。此方法需要在测控船底部安装多基元阵, 工程实施难度大, 设备维护修理困难, 船底安装基阵基线长度受限, 且测控船噪声对水声信号检测效果影响很大, 使得系统很难达到较高的测量精度和较远的测量距离。
船拖水听器基阵-声信标跟踪定位方法采用长基线水听器阵设计, 水听器阵元安放在软管内, 由船载伺服拖动装置拖曳, 通过测量目标声信标的pinger信号, 采用球面交汇、双曲面交汇算法解算出目标的位置。由于水听器基阵是安放在几十米长的软管内, 导致水听器基阵姿态难以控制, 当目标大舵角转向或测控船航路上有障碍物(如渔网)时, 很难保证水听器阵的姿态、深度、拖动速度和回转角, 造成部分目标信号数据丢失或失去目标信号, 从而导致定位、跟踪失败。船载差分全球定位系统(differential global positioning system, DGPS)安装在饲服拖动装置上[1], 水听器阵相对测控船的位置是不确定的, 跟踪定位精度较低。另外, 因不同海域水声传播特性的不确定性, 利用水声pinger信号测距也会导致定位精度降低。
以上2种传统测量方法在工程实现上存在较大困难, 测量指标精度也难以保证。目前, 捷联式光纤陀螺仪-DGPS组合导航定位技术已趋于成熟, 并有多种型号的产品。如法国的U-Phins水下光纤惯性导航系统, 内含数字信号处理器、卡尔曼滤波器, 并具有DGPS、水下声学定位系统、声学多普勒计程仪及深度传感器多种接口, 其定位精度优于3 m/h, 若采用DGPS和计程仪等多种数据拟和滤波处理, 可进一步提高系统的定位精度。因此, 本文提出在目标内部加装高精度捷联式光纤陀螺仪-DGPS组合导航装置(DGPS主要用于目标下潜前的初始定位), 采用船拖水听器-声信标水声多频多脉冲时延编码跟踪定位方法实现远航程水下运动目标导航定位。
1 船拖水听器-声信标水声多频多脉冲时延编码跟踪定位
该方法是在目标内部加装高精度捷联式光纤陀螺仪-DGPS组合导航装置, 用以测量、记录目标的航行姿态[2]、航行速度和位置坐标, 通过编码把水下目标的位置坐标数据实时转换为水声多频多脉冲时延编码信号发射, 船拖水听器接收水声多频多脉冲时延信号, 经放大、滤波和信号预处理后, 转换为数字信号发送给船载基站, 船载基站实时解算、显示目标的位置坐标、航行轨迹、航行速度和本船位置坐标等信息, 指引测控船完成远航程水下目标的实时跟踪、定位及监测任务。船拖水听器-声信标水声多频多脉冲时延编码跟踪定位系统海上实施示意图如图1所示。

图1 船拖水听器-声信标水声多频多脉冲时延编码跟踪定位系统海上实施示意图
船拖水听器-声信标水声多频多脉冲时延编码跟踪定位方法的定位精度以水下目标内载组合导航装置的定位精度为准, 船载基站的定位精度仅取决于目标内载组合导航装置的定位精度和水声多频多脉冲时延编码信号的时延检测精度, 与海区的水声传播特性无关。船拖全向水听器可测量周围任意位置的目标信号, 若测控船航路上有障碍物(如渔网)时, 可以以任意姿态航行而不影响测量效果, 紧急时还可短时回收水听器, 重新布放水听器时, 不会丢失目标, 也不影响定位精度。
1.1 系统原理及组成
船拖水听器-声信标水声多频多脉冲时延编码跟踪定位系统由声信标分系统和船载基站显控分系统两部分组成。声信标安装在水下目标上, 主要完成水下目标位置坐标的测量、记录和水声多频多脉冲时延编码信号的生成与发射功能, 船载显控基站主要完成水声信号的采集、检测、处理、定位解算和导引测控船功能。
声信标分系统由捷联式光纤陀螺仪-DGPS组合制导模块、信号处理模块、深度测量模块、内记模块和信号发射模块等组成, 系统组成原理见图2。其中组合制导模块提供目标的航行姿态、航行速度和位置坐标信息, 深度测量模块提供目标的深度信息, 计时与分频模块提供高精度的时间信息和载频信号, 信号处理模块接收组合制导模块数据、深度数据和时间数据, 把这些数据绑定送往内记模块记录, 并按一定时间间隔选取目标的位置坐标数据, 通过编码把选取的位置坐标数据转换为水声多频多脉冲时延编码信号发射。
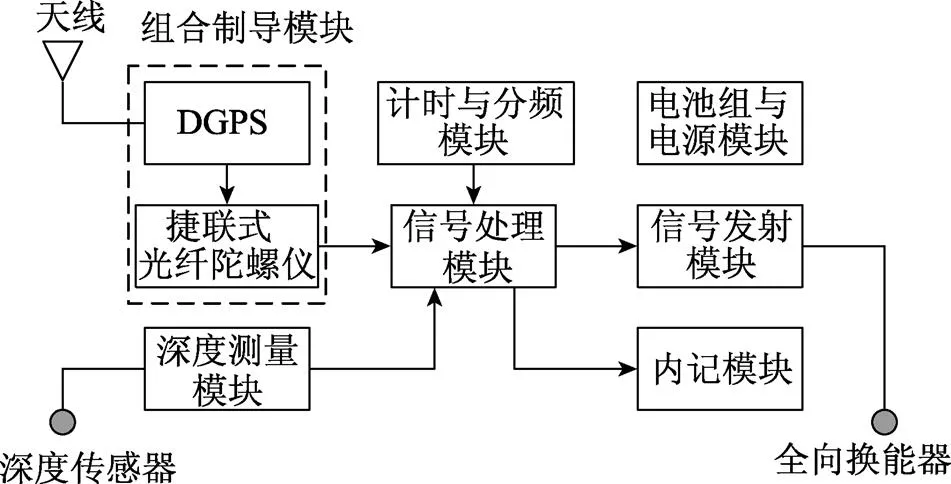
图2 声信标分系统组成原理框图
船载显控基站分系统主要由水听器、拖曳电子舱、船载处理机、主控与显控计算机和伺服拖动装置等部分组成, 系统组成原理如图3所示。

图3 船载显控基站分系统组成原理框图
图3中, 信号采集模块由前置放大、滤波部分组成, 负责多频多脉冲水声时延编码信号的采集、初级放大与滤波; 信号预处理模块由放大、A/D转换、自检模块、自适应滤波器、瞬时频率方差序列与门限检测器等部分组成, 完成信号A/D转换、检测与预处理和系统自检功能, 并把水声多频多脉冲时延编码信号的时延信息转换为时延数据信息, 通过拖曳电缆(422接口)把水声多频多脉冲时延编码数据和水听器深度数据传送给船载处理机; 船载处理机实时接收水听器深度数据、水声多频多脉冲时延编码数据和船载DGPS数据, 控制伺服拖动装置工作以保证水听器的工作深度, 绑定水声多频多脉冲时延编码数据、船载DGPS数据和水听器深度数据发送给主控计算机; 主控计算机实时解算、显示水下目标与测控船的位置坐标、运动轨迹、航速、航向、相对运动量和水听器的工作深度; 显控计算机安装在测控船驾驶指挥室, 以实时接收主控计算机的显控数据, 指引测控船完成跟踪、定位和监测任务。
1.2 水声多频多脉冲时延编码原理与定位精度估计
声信标把目标的位置坐标实时转换为水声多频多脉冲时延编码信号, 船载基站把水声多频多脉冲时延编码信号转换为目标的位置坐标信息[3]。


图4 水声多频多脉冲时延编码测量原理图
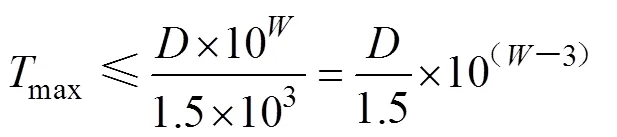
图4中, 假设水声多频多脉冲信号的最大作用距离为×10m, 水声传播速率约为1.5×103m, 得到目标水声脉冲信号到达测控船的最大传播时间
假设水声脉冲时延检测精度为µs;目标最大径向或纵向航程为×10m; 取水声多频多脉冲时延编码信号的最大延迟时间为max,s; 得水下目标位置测量精度

设目标组合制导精度为Δ2, 目标到显控基站距离的测量精度为Δ1, 得系统的定位精度

系统跟踪定位数据以目标内记数据为准, 船载显控基站的测量数据主要为测控船提供跟踪、定位、监测和导航信息。
2 试验结果与分析
为了验证本系统的实用性, 结合相关试验进行了验证。试验海况3级, 试验中捷联式光纤陀螺仪-DGPS组合导航系统安装在目标船上, 利用拖曳式水声换能器模拟目标, 设定工作深度30~50 m。目标显控基站安装在监测船上, 根据海区深度、声线梯度和监测船与目标船的相对距离, 预报声线传播特性, 通过收放拖缆调整监测水听器保持在最佳深度[4]。
设定跟踪范围纵向、径向均为±100 km, 目标脉冲检测精度为10us, 最小信号脉冲发射间隔为1ms(考虑信号延展), 水声多频多脉冲时延编码信号的最大延迟时间为5s, 脉冲时延间隔2.5s对应目标相对位置0点, 每间隔5 s发射1组脉冲(消除距离模糊且便于判别首脉冲)。目标换能器定位精度约为10 m。
在进行信号脉冲提取时, 考虑到试验海区水深及目标大致距离, 可获取目标直达波和1次、2次反射波信号。对于噪声干扰会造成某个脉冲信号判别丢失或目标处于声影区情况, 系统利用先验目标位置选取符合期望值的1组直达波或1次、2次反射波信号解算目标位置。
通过跟踪目标轨迹, 导引测控船与目标船的距离控制在3 km左右, 跟踪测量定位结果如图5所示。
对试验结果分析可知: 1) 利用船拖水听器-声信标水声多频多脉冲时延编码跟踪定位技术, 可实现远航程水下目标的跟踪测控; 2) 在连续测量的629组数据中, 直达波脉冲(首次到达的信号脉冲)丢失了43个信号, 利用反射波脉冲信号31组, 无法有效判定的信号2组, 表明利用目标反射波信号作为测量样本可行, 能有效解决噪声干扰导致直达波脉冲丢失或目标处于声影区问题。3)采用多脉冲时延编码定位技术, 有效消除了测距定位方法因声线弯曲、声速无规律变化引起的测距误差(水深30~50 m, 距离2~4 km, 因装定声速误差导致的测量误差约为30 m), 水下目标位置测量误差小于1 m, 系统定位误差主要表现为目标组合导航定位误差。

图5 跟踪测量定位结果
3 结论
本文提出的船拖水听器-声信标水声多频多脉冲时延编码跟踪定位方法, 可有效实现对远航程水下目标的跟踪定位和实时监测功能。通过试验验证可知, 系统的定位精度与海区声场特性无关, 主要取决于目标内载组合导航装置的定位精度。
[1] 宋凝芳, 杨功流. 光纤陀螺捷联式惯性系统的研究与设计[J]. 中国惯性技术学报, 2002, 10(2): 11-15. Song Ning-fang, Yang Gong-liu. Research and Design of FOG Strapdown Inertial Navigation System[J]. Journal of Chinese Inertial Technology, 2002, 10(2): 11-15.
[2] 张男, 王莹, 张尔扬. GPS/INS组合导航系统设计及实现方案[J]. 遥感技术与应用, 2002,17(2): 70-73. Zhang Nan, Wang Ying, Zhang Er-yang. The Design and Realizing Scheme of GPS/INS Combined Navigation System[J]. Remote Sensing Technology and Application, 2002,17(2): 70-73.
[3] 梁国龙.回波信号瞬时参数序列分析及其应用研究[D]. 哈尔滨: 哈尔滨工程大学, 1997.
[4] 程桂勇, 丁翠环, 岳剑平. 长基线浮标级联阵高精度跟踪定位算法研究[J]. 舰船科学技术, 2008, 30(5): 154-157. Cheng Gui-yong, Ding Cui-huan, Yue Jian-ping. Algorithm Study on High Precision of Acoustic Tracking for Long Base Line Buoy Relay Array[J]. Ship Science and Technology, 2008, 30(5): 154-157.
An Improved Navigation Positioning Method for Underwater Moving Target at Long Range
DU Zhao-ping, LIU Bai-feng, ZHAO Ye
(91388thUnit, The people′s Liberation Army of China, Zhanjiang 524022, China)
Two conventional positioning methods for an underwater moving target, i.e. ship-borne hydrophone array-acoustic beacon tracking positioning method and ship-towed hydrophone array-acoustic beacon tracking positioning method, are of low tracking positioning accuracy, and of difficulty in implementation and equipment maintenance. So we presented an integrated guidance technology by equipping underwater target with optical fibre gyro and adopting differential global positioning system(DGPS) to measure and record in real time the attitude, velocity and position coordinates of an underwater moving target. The position coordinate data of the target are converted to synchronous underwater acoustic multi-frequency and multi-pulse time-delay encoded signal for transmission, and the encoded signal is measured by ship-towed hydrophones and real-timely resolved by ship-borne base station, thus the measuring and control ship can be guided to accomplish the tasks of tracking, positioning, and monitoring an underwater target at long range in real time. The sea trial result demonstrates the effectiveness of the proposed positioning technology.
underwater moving target; hydrophone array; acoustic beacon tracking positioning; underwater acoustic multi-frequency and multi-pulse time-delay encoded signal; long range
TJ630.33
A
1673-1948(2012)04-0281-04
2011-12-27;
2012-04-05.
杜召平(1977-), 男, 硕士, 主要研究方向为水声测控技术.
(责任编辑: 杨力军)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
电声技术(2022年3期)2022-04-28
广东通信技术(2022年3期)2022-04-25
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
发明与创新(2016年17期)2016-12-22
发明与创新·大科技(2016年5期)2016-05-17
舰船电子工程(2015年4期)2015-03-15