
基于水下地形匹配大姿态误差角捷联惯导系统误差估计方法
2012-05-28 02:19:28张静远
水下无人系统学报 2012年3期
李 恒, 谌 剑, 罗 轩, 张静远
基于水下地形匹配大姿态误差角捷联惯导系统误差估计方法
李 恒, 谌 剑, 罗 轩, 张静远
(海军工程大学 兵器工程系, 湖北 武汉, 430033)

水下地形匹配; 捷联惯导系统; 误差估计; 误差模型; 无迹卡尔曼滤波
0 引言
对于捷联系统而言, 影响系统精度的主要误差源有惯性器件的刻度误差、安装误差以及漂移误差等[1]。一般情况下, 通过转台估计并补偿这些误差源后,若不拆装惯性器件,其刻度误差和安装误差基本保持不变[2]。但陀螺常值漂移误差和加速度计零位偏置却存在逐次启动不重复性的特点[3]。因此,在水下航行器航行过程中对惯性器件的误差进行在线估计具有非常现实的意义。此外, 在水下地形匹配辅助导航中, 水下航行器经过长时间航行积累了一定惯性导航误差,利用匹配区地形信息对惯导误差进行有效估计并修正, 将大幅提高水下航行器后续导航精度。
通常, 在姿态误差角较小时, 捷联系统误差模型可以描述为一组线性微分方程[2], 借助其他测量信息, 利用卡尔曼滤波(Kalman filter, KF)可以实现误差的在线估计[4-9]。但是水下航行器经过长时间航行, 进入匹配区时, 其姿态误差可能已经较大。仿真表明, 采用线性的方法进行误差估计, 将难以保证估计效果。本文通过建立水下地形匹配辅助导航系统非线性误差模型, 以地形匹配和深度压力传感器测量的位置信息和深度信息作为量测量, 设计了扩展状态无迹卡尔曼滤波器(unscented Kalman filter, UKF), 仿真分析了其误差估计效果。
1 水下地形匹配辅助导航非线性误差建模
1.1 捷联系统非线性误差模型
文献[10]利用欧拉平台误差角推导了捷联惯导系统(strapdown inertial navigation system, SINS)非线性误差模型
(1)
(3)
1.2 惯性器件误差模型
1.2.1 陀螺误差模型
陀螺误差通常包括安装误差、刻度系数误差和漂移误差等。其中, 漂移误差分为随机常值漂移、相关漂移误差以及白噪声过程等。
由于安装等误差一经校正变化很小, 而相关误差分量相对较小, 为了减少滤波器维数, 通常将它忽略。因此陀螺的误差由随机常值漂移和白噪声过程组成[11]
1.2.2 加速度计误差模型

1.3 深度压力传感器及地形匹配误差模型
影响深度压力传感器精度的因素很多, 有原理误差, 如水压与深度的非线性关系, 温度补偿不准确引起的误差等, 但由于水压深度是根据测量值解算获得, 诸多误差都可并为这种转换不准确而引起的转换误差, 即可用刻度系数误差来描述, 设备安装好后经一定校正, 这种误差的变化将很小。影响深度压力传感器精度的主要误差源还有方法误差。从水压换算成深度是相对实际基准海平面的, 而所需深度值应基于标准海平面, 两者间存在误差, 且这种误差随地点和时间变化, 是一随机过程, 可用1阶马尔可夫过程近似描述

匹配误差模型可以抽象描述为
2 基于扩展状态UKF的误差估计方法
2.1 扩展状态UKF算法原理
设非线性系统模型可描述如下
将系统噪声和量测噪声也作为状态量来处理, 扩展后的非线性系统模型
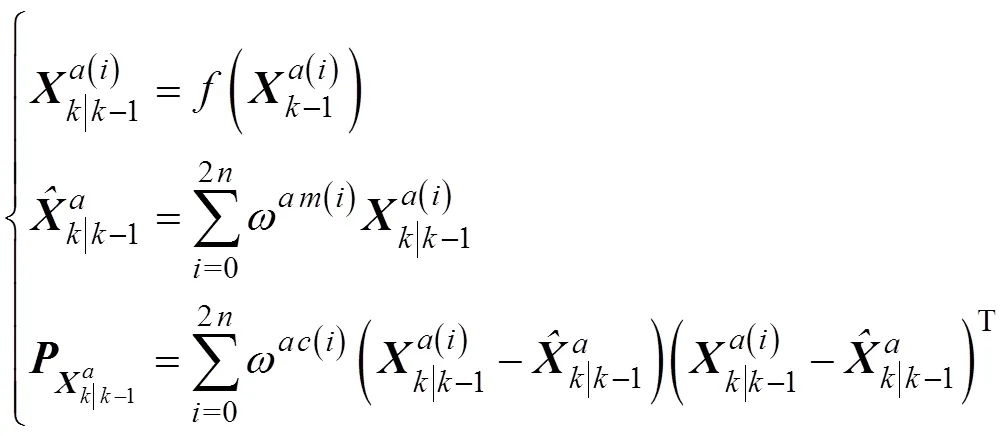
扩展状态UKF算法过程如下。

3) 状态量均值和协方差一步预测
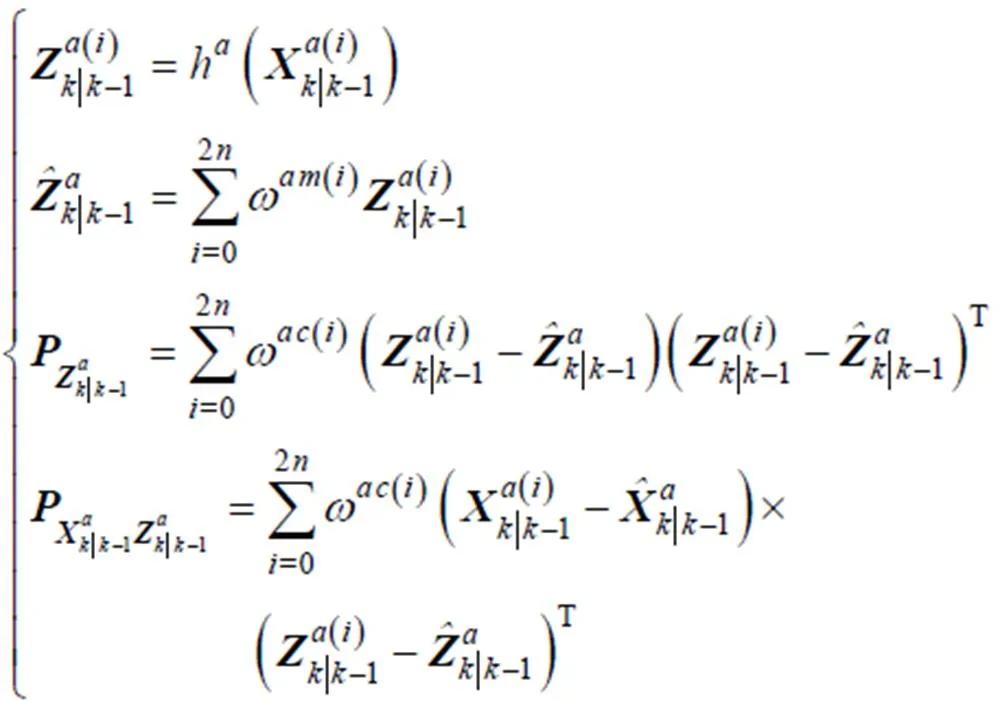
4) 观测量均值、协方差及互协方差一步预测
5) 量测更新

2.2 扩展状态UKF滤波器设计
选取各误差量作为状态量, 进行误差估计, 误差量具体选取: 捷联系统姿态误差、速度误差、位置误差、陀螺常值漂移误差、加速度计常值偏差以及深度压力传感器测量误差作为状态量, 共16D, 其表达式


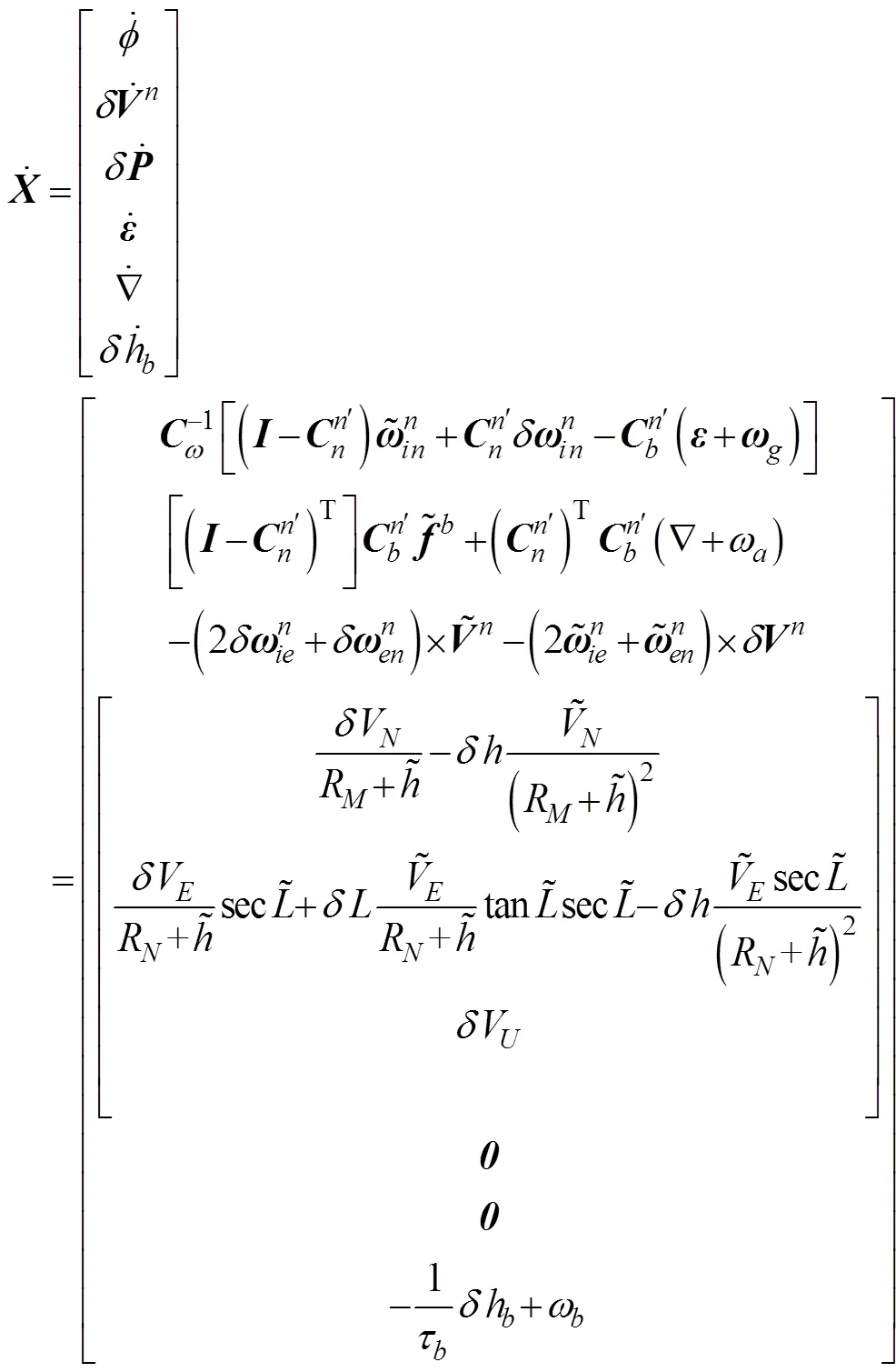
系统状态方程可表示为
将捷联系统导航位置输出分别与地形匹配以及深度压力传感器的量测作比较, 将差值作为滤波器的量测值, 这样能充分利用地形匹配和深度压力传感器较高精度的量测, 量测量为
系统量测方程

3 仿真及分析
仿真分为两部分: 首先研究传统的基于KF的误差估计效果与姿态误差角关系; 然后进一步研究UKF在大姿态误差角下的估计效果。
3.1 仿真参数设置
3.2 仿真结果及分析
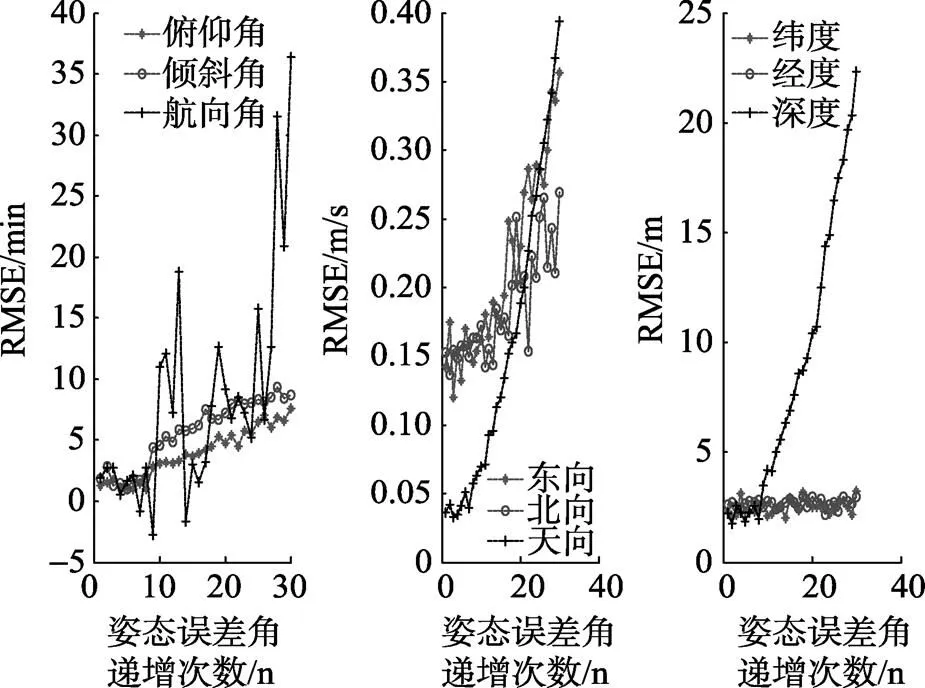
图1 30次蒙特卡洛仿真卡尔曼滤波[U11] 估计均方根误差
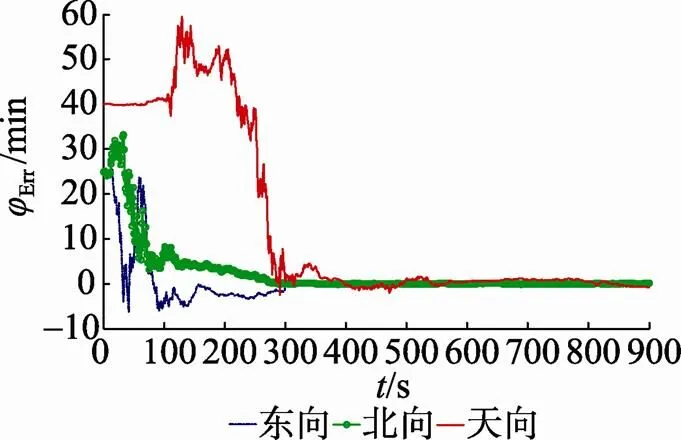
图2 无迹卡尔曼滤波姿态估计误差
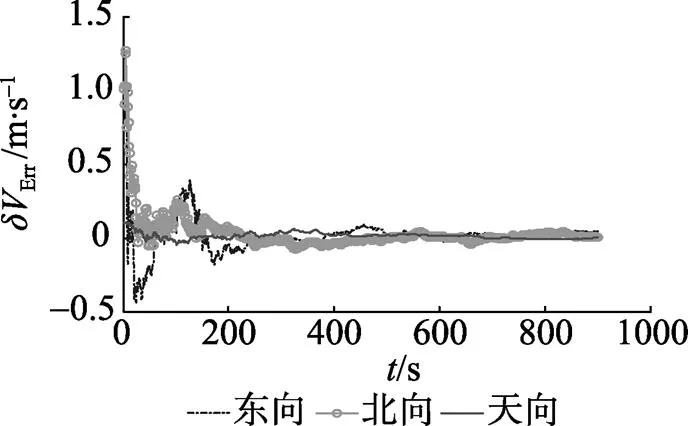
图3 UKF速度估计误差
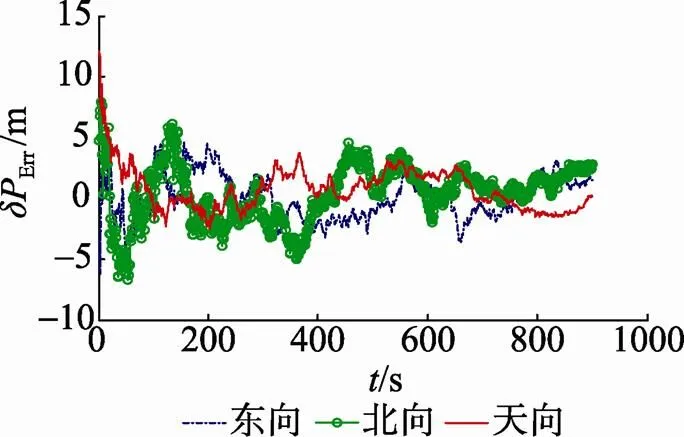
图4 UKF位置估计误差
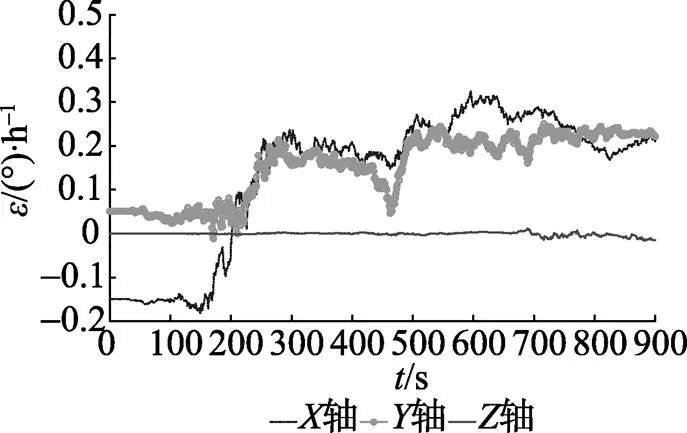
图5 UKF陀螺常值漂移估计
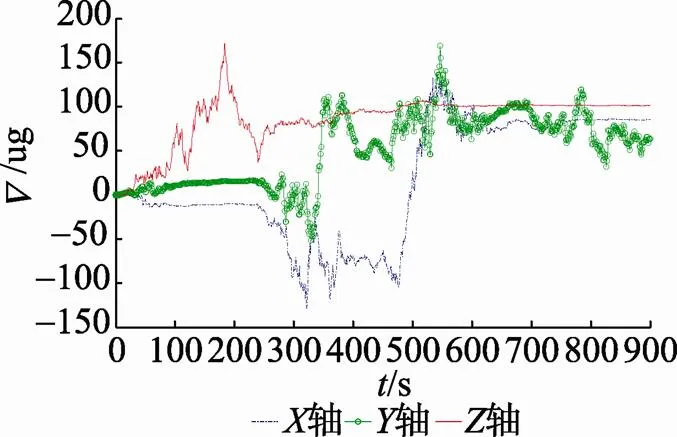
图6 UKF加速度计零偏估计
4 结束语
针对大姿态误差角下传统线性估计方法的局限性, 研究了基于扩展状态UKF滤波的捷联系统误差估计方法。通过建立系统非线性误差模型, 设计了扩展状态UKF滤波器, 仿真研究了其标定效果。结果表明, 在大姿态误差角情形下, 本文所提出的方法具有较好的标定效果, 研究结论为匹配区中在线估计捷联系统误差提供参考。
[1] 万德均, 房建成. 惯性导航初始对准[M]. 南京: 东南大学出版社, 1998.
[2] Saab S S, Gunnasson K T. Automatic Alignment and Calibration of an Inertial Navigation System[C]//IEEE Plans′94, 1994: 845-852.
[3] Carlson C R, Gerdes J C, Powell J D. Error Sources When Land Vehicle Dead Reckoning with Differential Wheelspeeds[J]. Navigation, Journal of the Institude of Navigation, 2004, 15(1): 13-27.
[4] 李涛, 武元新, 薛祖瑞, 等. 捷联惯性导航系统误差模型综述[J]. 中国惯性技术学报, 2003,11(4): 66-72.Li Tao, Wu Yuan-xin, Xue Zu-rui, et al. Survey on Error Models of Strapdown Inertial Navigation System[J]. Journal of Chinese Inertial Technology, 2003, 11(4): 66-72.
[5] 张小跃, 张春熹, 宋凝芳. 基于组合导航技术的光纤捷联系统在线标定[J]. 航空学报, 2008, 29(6): 1656-1659. Zhang Xiao-yue, Zhang Chun-xi, Song Ning-fang. Online Calibration of FOG Strapdown System Based on Integrated Navigation Technology[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(6): 1656-1659.
[6] 卫育新, 白俊卿. 车载SINS/DR组合导航系统的在线标定方法[J]. 中国惯性技术学报, 2009, 17(6): 651- 653.Wei Yu-xin, Bai Jun-qing. Method of Vehicular SINS/DR Integrated Navigation System′s On-line Calibration[J]. Journal of Chinese Inertial Technology, 2009, 17(6): 651- 653.
[7] 陆志东, 王磊. 捷联惯导系统的空中标定方法[J]. 中国惯性技术学报, 2007, 15(2): 136-138. Lu Zhi-dong, Wang Lei. In-flight Calibration Method for SINS[J]. Journal of Chinese Inertial Technology, 2007, 15(2): 136-138.
[8] Bar-Itzhack I Y, Harman R R. In-space Calibration of a Gyro Quadruplet[R]. AIAA-2001-4152, 2001.
[9] Rogers R M. Applied Mathematics in Integrated Navigation Systems[M]. Reston: American Institude of Aeronautics and Astronautics Inc, 2003.
[10] 严恭敏,严卫生,徐德民. 基于欧拉平台误差角的SINS非线性误差模型研究[J]. 西北工业大学学报, 2009, 27(4): 511-517. Yan Gong-min, Yan Wei-sheng, Xu De-min. A SINS Nonlinear Error Model Reflecting Better Characteristics of SINS Errors[J]. Journal of Northwestern Polytechnical University, 2009, 27(4): 511-517.
[11] 李恒, 张静远. 基于水下地形匹配的捷联系统误差估计方法研究[J]. 海军工程大学学报, 2012,24(1): 39-44.
Li Heng, Zhang Jing-yuan. Study on SINS Error Estimation Based on Underwater Terrain Matching[J]. Journal of Naval University of Engineering, 2012, 24(1): 39-44.
[12] Julier S, JUhlmann J K. The Scaled Unscented Transformation[C]//Proceedings America Control Conference, 2002: 4555-4559.
Error Estimation Method of SINS with Large Attitude Error Angle Based on Underwater Terrain Matching
LI Heng, SHEN Jian, LUO Xuan, ZHANG Jing-yuan
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
underwater terrain matching; strapdown inertial navigation system(SINS); error estimation; error model; unscented Kalman filter (UKF)
TJ630.33; TJ765.3
A
1673-1948(2012)03-0201-05
2011-07-12;
2011-09-22.
部级国防科技预研基金项目(1010602010502).
李 恒(1982-), 男, 在读博士, 从事惯性导航及组合导航研究.
(责任编辑: 杨力军)
猜你喜欢
中学数学(2022年17期)2023-01-11 01:39:12
中学数学杂志(2022年17期)2022-09-20 07:25:10
北京航空航天大学学报(2017年5期)2017-11-23 05:53:29
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
北京航空航天大学学报(2017年4期)2017-11-23 05:48:25
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
导航与控制(2016年1期)2016-10-14 05:27:14
系统工程与电子技术(2016年7期)2016-08-21 13:58:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
