
一种移动机器人避障与追踪技术研究
2012-05-10 11:05李海波
制造业自动化 2012年18期
丁 伟,李海波
(南阳理工学院,南阳 473004)
0 引言
科技的进步,推动了机器人的普遍应用。从前这只是用在比如航空航天、深海探测、医疗等高科技和人类无法进入的危险或者恶劣的环境中,如今它开始渗透进我们的日常生活中,性能也在不断增强。在机器人路径规划中避障控制问题长期以来都是一大难点,通常根据机器人对环境信息的感知程度,将其分为两类:全局路径规划对于环境完全知道和局部路径规划指未知或部分未知环境。
对于全局路径规划比较容易,但是在实际环境中经常会遇到不可控的情况,使得机器人程序不能对实际环境做出判断,而导致机器人出错甚至失控。本文采用了一种分布式的结构,设计了一种双层模型的协作实现动态环境中的导航。在底层中充分满足系统对实时性的要求而采用反应式避障算法;增加了在高层中对未知环境的建模分析,并指导底层采取相应的避障策略来实现避开障碍物。这种改进后的双层模型能够很好地解决未知环境下的建模和分析的复杂性和机器人要求避障所具有实时性的矛盾。并且该避障导航策略在移动机器人MORCS21上进行实验验证。
1 避障系统整体设计
整个设计是一个分布式结构如图1所示,由两台工控机组成。环境建模、激光雷达、障碍物检测和动态避障等模块在IPC1上运行,该层包含了大量运算和处理的信息,选择高性能的工控机。在IPC2上负责后面的运动控制和反应式避障模块。工控机之间的通讯选用标准的RS232串口,监控端和机器人之间通过无线网桥通讯。
机器人蔽障的情况通常分为两种:底层的避障过程通过机器人就能完成,另一种,尤其是存在动态障碍物时,要通过高层的指导。本文是一个两层结构:底层是反应式避障模块,在已知的静态环境下只要用反应式避障就能直接对静态障碍物实现避障;当遇到未知的或动态的环境时,就需要先通过高层对障碍物进行建模分析,然后提前指导底层的反应式避障模块来避开动态障碍。

图1 双层模型结构图
2 环境建模
2.1 激光雷达误差分析
本次设计的环境感知传感器选择SICK公司的LMS291型激光雷达。解析度为0.5°,即每一周期将其前方180°以内的返回361个数据,一次线扫描的完成周期为26.67ms。因为测量的距离会严重影响到激光雷达所测数据的误差,所以实验统计出不同距离的标准差值如表1所示。
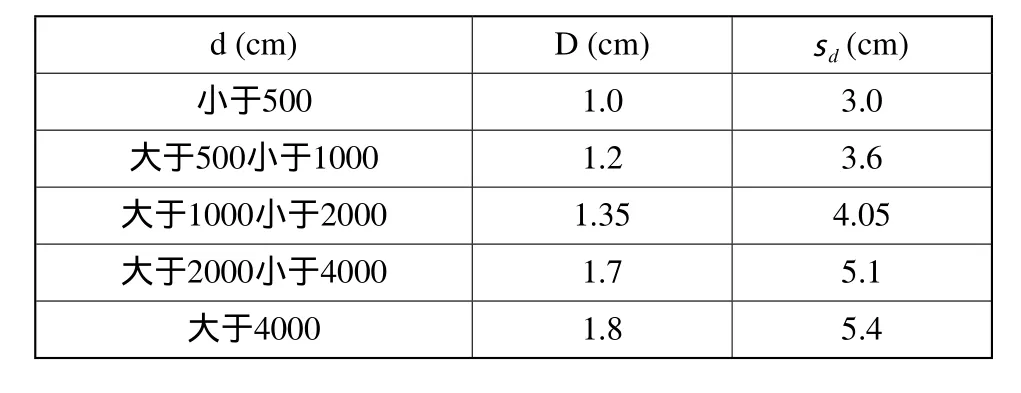
表1 不同距离的标准差值
d为探测的距离范围;D表示一个目标几次测量取平均值的标准差;sd表示异类物体测量距离时的误差估计值,是D值的3倍。在这里可以认为D是静止物体的均值算值,sd看作是动态环境一次测量的估计误差值。
动态环境下障碍物的测量误差so由雷达的测量误差sd和机器人在动态环境下的运动误差sm组成,表示为:

在本文中,机器人的前进速度最大是20cm/s,如果障碍物移动速度小于60cm/s,那么sm=4.0cm为最大值。
2.2 动态环境建模型
雷达探测环境的表示用二维笛卡儿矩形栅格地图。栅格的大小直接影响到控制算法的具体精度,根据机器人的尺寸和激光雷达速度快、精度高的优点,选择10×10cm 为一格。
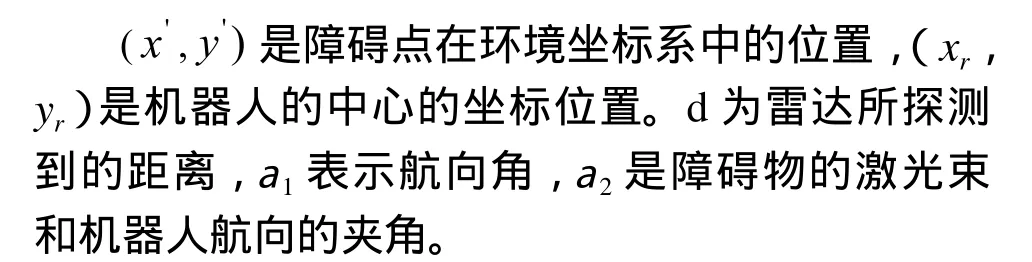
机器人的世界坐标系可以通过激光雷达测量的信息映射出来:
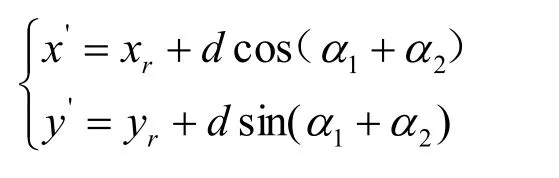
通过公式将障碍点映射到栅格地图上的相应处。
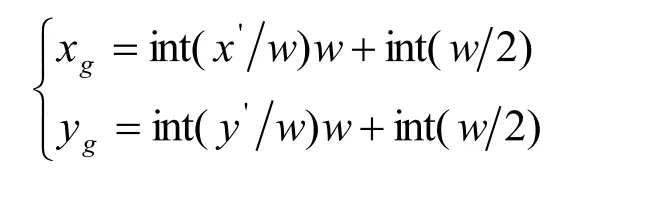
其中,(xg,yg)表示在环境坐标系中栅格的坐标,w表示宽度。
在本文中障碍物扩张距离Wr选择54cm,并且在正前方开一个半圆当做检测窗口,只对进入该区域的障碍物检测其动静态,可以降低系统的数据计算量。
2.3 检测障碍物
这里雷达的解析度为0.5°,在11.5m时扫描间隔达到10cm,在20m时达到17.5cm。在检测窗口中由于最远距离是20m,扫描点的间距小于Wr,障碍物扩张之后,栅格地图中表示障碍块的各栅格间相互连通。通过对栅格块内的搜索确定障碍块的扫描点集合W,如果有n个扫描点,根据下面公式求出该障碍块的中心位置。

公式中X0i,Y0i分别为W中扫描点在环境坐标中的位置;X,Y为障碍物的估计位置。因为每次扫描不到障碍物的全部信息,所以公式只能得到大概位置。
激光雷达每次只能采集到局部周期的环境信息,所以检测动态环境时必须采样多个周期,具体的分析步骤如下:
1)读取探测到窗口的实时信息,建立和保存栅格地图。扩张障碍物,计算出估计外切圆半径和坐标位置,建立T周期的障碍物链表。
2)同第1步读取下一周期检测窗口信息,建立T+1周期链表。
3)搜索T+1周期链表和T周期链表配对,若匹配即被看做是同一个障碍物。
4)将每对障碍物在T和T+1周期栅格地图所在的局部栅格地图匹配,计算出障碍物移动的距离、速度和方向。
5)确定状态,通过移动距离和域值d比较来判断障碍物是静态还是动态。将结果记录并插入链表中。
6)返回第2步。
3 避障策略
3.1 反应式避障策略
通过激光雷达采集到的信息直接进行方向评估,选择最优可行方向避障,适合静态的或者速度相对较低的动态障碍,它在IPC2上运行。该模块只需要做避障处理,可以将IPC1发送给IPC2的激光雷达信息压缩,只取每5°为一个采样周期,这样每个周期的数据压缩到37个,分别用L0,L1,L2, !,L36, 表示37个候选方向。以机器人中心按活动窗口远近可以分成7层,最内层是保护层,障碍物一旦进入该层,机器人立刻后退或者停止。其他为影响层,由机器人的机械结构划分。
移动机器人的可选方向计算公式:
此外,还要通过对可选方向的评估来确定机器人下一时刻的最佳方向。评估的代价函数为:

其中,c为需要评估方向,D (c,kg)为目标方向和c方向之间的夹角,D (c,kr)为机器人和c的夹角。m1越大表示机器人朝着目标方向行进,m2表示机器人方向的变化程度。选取计算g(c)最小值作为机器人下一个时刻移动的方向。
3.2 动态障碍避障策略
本文只分析动态障碍物和机器人的速度差距不大,而且障碍物只进行匀速直线运动。由于扩张了障碍物,所以把机器人看作一个质点,障碍物用其外切圆进行代替。它们的位置关系只有两种情况。
1)机器人和动态障碍物在同一直线上运动
若机器人和障碍物运动方向的夹角设为qRO。若qRO=180°,表示机器人和障碍物相向运动,若qRO=0°且机器人比动态障碍物的速度快也会相撞。
机器人用PR表示、动态障碍物用Oi。机器人和障碍物的Q点的碰撞点用CQ表示,机器人和障碍物外切圆心O的碰撞点用CO表示。vR,vO分别表示机器人的速度和障碍物的移动速度。PA,PB表示移动机器人进行动态避障时的子目标点。
若qROi=180°,PA,PB的坐标公式为:

若qROi=0°并且vR>vO时
若机器人选择了PA或PB以后,把点作为下一个子目标点,达到避开一条直线上的动态障碍物。
2) 机器人与动态障碍物的轨迹相交
当qRO≠0°时,移动机器人和障碍物的运动呈角度相交,通过计算得到其有无可能相碰。我们通过调节速度使机器人避开障碍物。

图2 机器人和障碍角度相交
当机器人的速度ΓR范围[vmin,vmax]时,机器人和移动障碍物可能会碰撞,通过下面的公式求出 ΓR。

如图2所示是机器人和障碍物相交角图, 若机器人在 [vmin,vmax]范围内的速度,表示机器人一定会和障碍物相撞,需要调整机器人的速度。
4 实验
4.1 实验系统
本文的方法是在MORCS21的移动机器人上进行。它有6个驱动轮,有3台通用工控机,激光雷达采用LMS291作为环境传感器,用ADT2850控制卡驱动步进电机进行控制。因为数据量比较庞大,因此将环境建模、激光雷达和策略处理几个模块放在同一台IPC1上。在IPC1和IPC2之间用串口RS2232实现快速通讯。
4.2 实验结果
在试验中,激光雷达检测范围内没有障碍物时机器人就以20cm/s高速运行,遇到避障的情况时,机器人就以5cm/s低速运行状态。
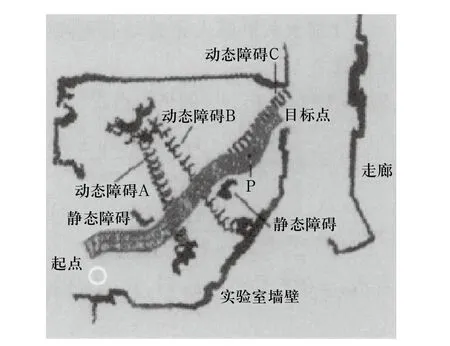
图3 动态环境下机器人避障
如图3 所示,在实验中首先摆放几个静态障碍物。机器人只调用了反应式模块就成功避开这些障碍物;并且探测到了一个动态障碍物A,运动的速度比较慢,机器人改变成较快的速度后实现蔽障;然后又探测到另一个动态障碍B,速度相对比较快,机器人通过减慢速度蔽障;最后是同时探测到了一个静态障碍和一个动态障碍物C。机器人通过选择一个P子目标点,当运行到P点后成功地避开了这两个障碍物,最终到达终点。实验证明该双层模型的有效性。
5 结论
本文设计了一个双层模型的移动机器人避障跟踪技术,底层是个反应式避障模型,通过激光雷达检测、环境检测、动态避障等模块实现,高层通过对障碍物的建模分析指导底层有效避障。文章从系统的整体结构、建模分析、避障策略几方面进行分析,然后通过实验证明了该模型能有效避障。
[1] 王耀南. 机器人智能控制工程[M]. 科学出版社, 2004.
[2] Woonggie H. Seungmin B;Taeyong K Genetic Algorithm Based Path Planning and Dynamic Obstacle Avoidance of Mobile Robots, 1997.
[3] 于金霞, 蔡自兴, 段琢华. 基于激光雷达的移动机器人运动目标检测与跟踪[J]. 电子器件, 2007.
[4] 郑敏捷, 蔡自兴, 于金霞. 一种动态环境下的移动机器人避障策略[J]. 高技术通讯, 2006.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中学生数理化(高中版.高考理化)(2021年10期)2021-12-06
科技创新与应用(2021年31期)2021-11-09
中北大学学报(自然科学版)(2020年4期)2020-07-13
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
制造技术与机床(2017年3期)2017-06-23
弹箭与制导学报(2015年1期)2015-03-11
雷达学报(2014年4期)2014-04-23
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
