
基于移动对象数据库的航行信息更新机制
2012-05-09 10:13李方亮杨智应
上海海事大学学报 2012年3期
李方亮,杨智应
(上海海事大学信息工程学院,上海 201306)
0 引言
移动对象数据库是近年来备受关注的一个相对较新的研究领域,其总目标就是允许用户在数据库中表示移动实体[1](汽车、船舶、飞机、手机用户等),并执行有关移动的查询[2].运动的空间对象需要将其状态信息(位置、速度等)传送给数据库,为数据库中的检索和查询提供最新的信息.
针对移动对象的位置更新问题,在现实应用中已提出很多解决方法.其中,固定时间和固定距离更新移动对象信息是两种常见方法.这两种方法实现简单,但是都较难选择一个合适的时间值平衡更新的频率,以便平衡更新中的通信复杂度和精确度.除此之外,基于向量的更新方法受到很大关注,文献[3]和[4]提出根据移动对象所在网络的拓扑结构和路线的几何形状实现状态更新,文献[5]和[6]在此基础上提出 IDTLU(ID-Triggered Location Update),DTTLU(Distance-Threshold-Triggered Location Update)和 STTLU(Speed-Threshold-Triggered Location Update)方法.
船舶在航行过程中通过船载的黑匣子实时记录船舶的各项航行信息,目前的通信能力已经能够实现船舶与地面中心通信,以便地面中心能够实时监控船舶的状态.[7-8]利用移动对象数据库存储移动对象(船舶)的状态信息,能更方便地实现对船舶航行的历史、现在和未来的管理.基于这样的理念,本文利用基于运动矢量的位置更新机制(Motion-Vector-Based Location Update Mechanisms,MVBLUM)结合船舶航行中的多项信息,给出航行信息更新频率方案,并将船舶的实际航迹与通过更新数据形成的航迹进行比较来证实更新方案的有效性.
1 船舶航线的数据模型
船舶在港口间航行受多方面因素的影响[9],一般会制定多条航线,航行过程中按照既定航线航行,但其实际航迹与预定航线是有差距的.
下面主要讨论如何以移动对象数据库的方式记录船舶航行信息.在航行中,船舶、港口、航线均以绝对的位置(经度、纬度)表示,同时对预定航线和实际历史航迹也以实际的绝对记录方式进行.[10-11]
定义1 定义航线

式中:ir为航线(或历史航迹)的标志;g为航线地理集合形状;l为航线长度;SAR为航线中的原子航段集合.
定义2 移动点是航线中的基本单位,原子航段其实由一个移动点构成,示意图见图1.

式中:im为移动点标志;(θlong,θlati)是移动点的起始位置,一对经纬度坐标;c为移动点在起始位置的航向;d是距离下一个移动点的距离.这样,一条预定航线可以由一个移动点集合表示(实际的历史航迹还包括很多其他信息).

图1 航线R以及其中的移动点、原子航段
图1中圆点表示航线中的移动点,以圆点为起始的线段表示航段.
定义3 定义移动对象(船舶)在t时刻的运动矢量

式中:t为采集该运动矢量的时间;(θlong,θlati)指采集信息时移动对象所在位置;vt为t时刻船舶航行的速度;ct为t时刻船舶的航向;e是指其他的额外信息(包括航首向、航行状态、吃水深度、目的地、预计达到时间等).
定义4 移动对象的时空轨迹是移动对象在行驶过程中通过位置更新操作提交的运动矢量序列,定义为

式中:vm,n是移动对象所提交的最后一个运动矢量,称为活动运动矢量,包含计算移动对象现在和将来位置的关键信息.多个移动对象的时空轨迹见图2。

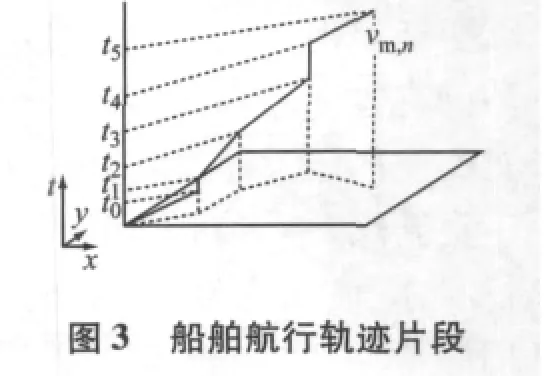
图2中整个长方体的下表面是最初时刻移动对象记录,上表面为最后时刻移动对象记录.
近年来燃气轮机组、热电联产、电转气及电转热等元件推广应用,为多能互补、间歇性可再生能源的消纳提供了新的解决方案,同时逐步加深了多能源系统(电力系统、天然气系统、热力系统等)之间耦合。在此背景下,有必要打破传统多能源系统之间独立规划与运行的壁垒,构建协同统一的综合能源系统投资规划、运行调度及市场交易机制,以推动我国能源系统的改革与转型,为我国低碳可持续能源系统的构建及能源互联网战略提供技术参考。
图3为整个航线中的一个片段,根据该片段最后一次更新 vm,n可预测未来一段时间内船舶的航行.
2 船舶航线的位置更新机制
结合船舶的航行特点,采用运动矢量实现船舶在航行过程中的状态信息更新.根据更新规则,移动对象向服务器传输必要的信息,服务器记录船舶航行的整个历史轨迹以及当前状态.更新规则保证服务器记录的信息能够真实反映航行轨迹并且尽可能减少通信代价.
2.1 位置更新机制
移动对象(船舶)在海平面上航行时会不断将船舶当前的各项参数与最后一次更新的运动矢量进行比较.如果满足更新条件,那么当前运动矢量的信息会被传送到服务器.
考虑船舶航行信息的特点[4],对那些不常变化并对船舶位置没有影响的信息采用相等对比的方式.对向量分量中与船舶航行轨迹关联较为紧密的位置坐标、速度、航向,定义以下更新规则作为更新触发条件:
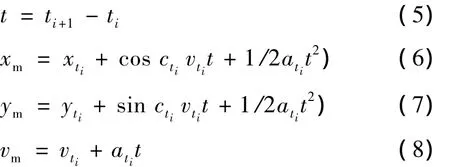
移动对象在时刻 ti的运动矢量 vm,vi= (ti,(xti,yti),vti,cti,hti,nti,dti,sti,Tti),其中:位置(xti,yti)是经过坐标转换的位置;vti为速度;cti为运动方向;hti为航首向;nti为航行状态;dti为航行中的吃水深度;sti为航行目的地;Tti为航行到达时间.
ti时刻的加速度为ati,对于下一个时刻ti+1,通过上次的更新记录预测在时刻ti+1的位置(xm,ym)和速度vm.
更新规则1 xti+1根据ti+1时刻的(xti+1,yti+1)位置,知道预测位置和船舶实际所在位置距离s为两点(xm,ym)与(xti+1,yti+1)的欧几里德距离.定义距离超过一定阈值则触发更新.
更新规则3 对于船舶方向在规则1和规则2中虽已有体现,但是精确记录船舶转弯,同样对船舶航行的航向角设置差值的阈值,以控制航向的陡变.
更新规则4 对船舶的其他动态信息(航首向、航行状态、吃水深度、目的地、预计到达时间)直接利用等量对比方式触发更新.
更新规则中的阈值可以根据船舶的航行特点和所需监测数据的精度确定,因为与常见交通路网中的汽车相比,船舶的航行状态更稳定.
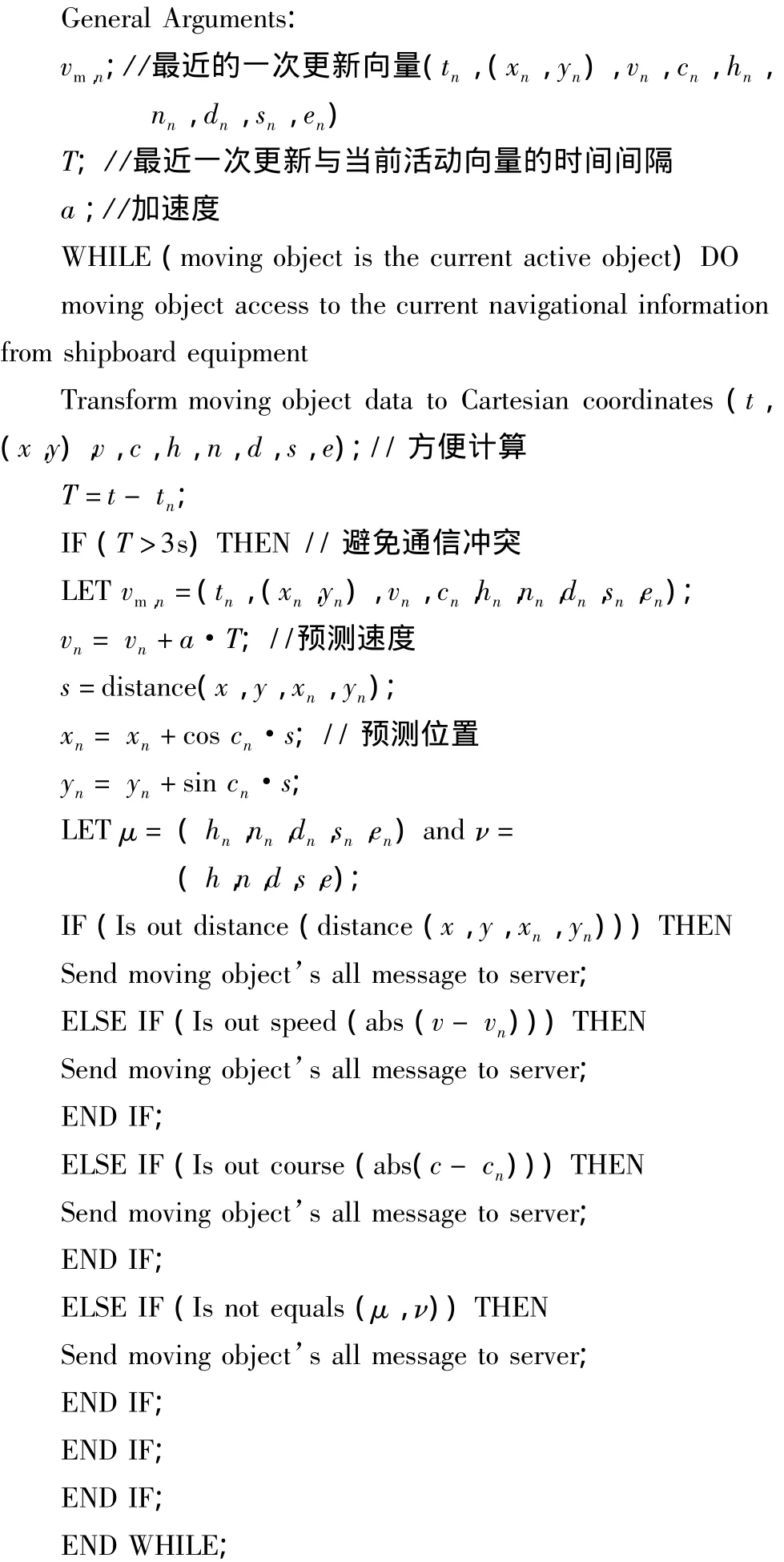
除了上述更新规则之外,为避免出现数据通信过程中的碰撞,两次更新的时间差应大于3 s.在移动对象更新过程中,确定更新规则1,2和3之后,另外的操作就是进行字符对比.通过这些规则形成完整的船舶航行的整个信息更新机制如下:
算法1.航行信息更新算法
3 实验结果和分析
3.1 实验结果
为了验证整个更新机制可节省的通信量和能够达到的精确度,做一系列实验并对其结果数据进行分析.为真实反映船舶航行的实际状况,从以往船舶实际航行的历史数据中选取4条船的状态记录作为当前活动的移动对象每次获得航行信息的基础数据,利用上述更新策略进行处理得到结果数据,见表1。表中:MMSI_Number为船舶的标号;原始数据是移动对象(船舶)通过所载设备获取的航行信息次数;更新后数据是更新到移动对象数据库中的数据,即数据库中记录的船舶航行轨迹;节省通信量为与船舶当前通信频率相比可减少的通信量.这4条船中:110603267为正常航行;123456778基本静止,受风力等非人为影响的晃动;200804300时而静止时而航行;209075000为正常航行情况下往返于两个目的地.
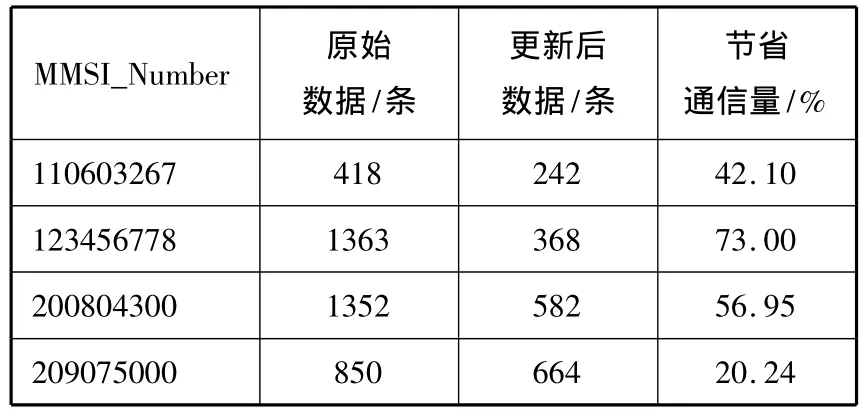
表1 更新前后船舶通信代价对比
为展示更新后所记录船舶航行轨迹的精确性,对比船舶的航行轨迹和数据库记录轨迹.图4为船110603267的轨迹.从图4中可以看出,更新过程中只是过滤掉不必要的数据,更新后的数据可真实反映船舶的实际航行轨迹.结合算法1可以得出结论:查询精度取决于其中的距离阈值、速度阈值和航向阈值,实验中的这些值根据船舶实际航行的特点不难适当确定.根据算法1的更新条件可以断定,在对历史轨迹进行查询的过程中,其位置误差不会超过距离阈值.
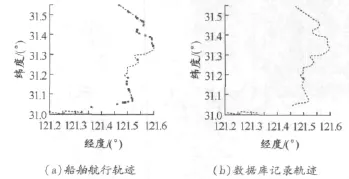
图4 移动对象更新前后轨迹对比
4 结束语
国内外移动对象数据库方面的研究已经趋于成熟,但对移动对象数据库在航海领域的应用缺乏探索.船舶的航行更具有规律性特点,针对这一移动对象的特性,更深一步地利用其航行的历史数据,可能会达到更好的效果.进一步的研究将针对船舶的航行特点,在移动对象的数据更新、存储和查询优化方面让移动对象数据库对航海领域的移动对象数据管理发挥更大作用.
[1]GÜTING R H,SCHNEIDER M.Moving objects databases[M].Morgan Kaufmann,2005:48-52.
[2]DING Zhiming,GÜTING R H.Managing moving objects on dynamic transportation networks[C]//Proc 16th Int Conf on Sci& Stat Database Manage,SSDBM 2004.
[3]WOLFSON O,YIN Huabei.Accuracy and resource consumption in tracking and location prediction[C]//HADZILACOS T.Advances in Spatial and Temporal Databases:Refereed Proc 8th Int Symposium on Spatial and Temporal Databases SSTD 2003,Santorini Island,Greece,2003(8):325-343.
[4]DING Zhiming,GUO Limin,MENG Xiaofeng.Adaptive location update mechanism for network-constrained moving objects in changeful traffic conditions[C]//2009 10th Int Conf on Mobile Data Management:Systems,Services and Middleware,2009:417-423.
[5]DÜNTGEN C,BEHR T,GÜTING R H.Berlin MOD:a benchmark for moving object database[J]VLDB J,2009,18(6):1335-1368.
[6]TRAJCEVSKI G,WOLFSON O,ZHANG Fengli,et al.The geometry of uncertainty in moving objects databases[C]//Proc 8th Int Conf on Extending Database Technol:Advances in Datebase Technology(EDBT 2002),Prague,Czech Republic:233-250.
[7]申慧超,胡勤友,杨春.基于AIS数据的预抵船舶联系信息查询系统[J].上海海事大学学报,2010,31(4):13-16.
[8]王艳军,王晓峰.AIS和北斗终端组合在船舶动态监控中的应用[J].上海海事大学学报,2011,32(4):17-21.
[9]张浩,俞斌,肖英杰,等.船舶定线制设计方案评价[J].上海海事大学学报,2010,31(3):5-9.
[10]丁治明,李肖南,余波.网络受限移动对象过去、现在及将来位置的索引[J].软件学报,2009,20(12):3193-3204.
[11]丁治明,韩京宇,李曼,等.基于网络受限移动对象数据库的交通流统计分析模型[J].计算机研究与发展,2008,45(4):646-655.
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
疯狂英语·新读写(2021年6期)2021-08-05
小哥白尼(神奇星球)(2021年12期)2021-03-08
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
出版与印刷(2013年3期)2013-01-31
