基于LiDAR点云数据的电力线自动提取技术研究
2012-04-29 00:44胡茂林
科技创新导报 2012年21期
胡茂林

摘 要:随着智能电网建设的大规模开展,对电网快速、高精度勘测、巡查和可视化管理提出了巨大的应用需求。本文提出了基于输电线路LiDAR点云数据自动提取电力线的思路与方法,对基于LiDAR的电力线提取精度进行了试验评定,表明基于LiDAR可快速高精度建立三维数字电网数据库,满足智能电网应用要求。
关键词:LiDAR数字电网点云滤波电力线提取
中图分类号:TM7 文献标识码:A 文章编号:1674-098X(2012)07(c)-0012-02
智能电网是建立在集成的、高速双向通信网络的基础上,通过先进的传感和测量技术、先进的设备技术、先进的控制方法以及先进的决策支持系统技术的应用,实现电网的可靠、安全、经济、高效、环境友好和使用安全的目标。为实现智能电网的建设,建立详细、三维的数字电网数据库是一项关键的基础性工作。机载激光雷达技术作为新一代遥感技术,以激光脉冲作为测量媒介,高度集成GPS、INS以及激光扫描测距仪等先进设备,可快速获取高精度的目标三维坐标,凭借激光脉冲穿透性好的优势,可快速探测植被下的地表信息,用来建立三维数字电网数据库。进一步获取电力线及其走廊环境内的地表物高精度三维坐标,利用该坐标数据对电力线进行快速准确地矢量化,并计算电力线与地表物的间距,从而实现对电力线安全运行的检测,本文介绍了基于LIDAR点云数据自动提取电力线的算法。
1 基于LiDAR点云的电力线安全要素提取和分析
为了进行电网安全计算和分析,必须要解决电力线安全计算所需要的电力线和植被等安全要素的提取和分析,其中,电力线可通过提取拟合得到,植被则采用滤波分析计算。
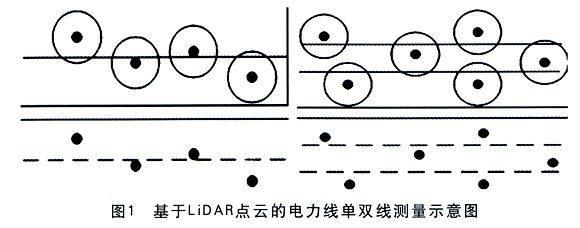
由于机载激光雷达测量技术测量的媒介是激光脉冲,其具有一定的发散性,故测量过程中其测量的地物标志往往与实际位置存有偏差,造成所获取的电力线点云并不是在一条线上,而是呈弯曲点线状(如图1),给电力线提取带来困难。
为了从非规则、非线性的点云束中获得电力线几何参数,需要对电力线进行提取和拟合。基于LiDAR点云数据提取电力线包括以下步骤:
(1)电力线点云数据分类
提取电力线的第一个步骤首先是将电力线点云数据从所有点云中分类出来。由于点云数据除了三位坐标值外(有的附带点云强度信息),没有其他属性值。首先需要将电力线点云、铁塔点云及地表物点云与地面点云分开,通常可采用基于高程投影分割方法对电力线点云数据进行分类。
(2)电力线初步提取(提取大致走向和重要节点)
电力线点云数据提取后,根据其点云数据对电力线路的走向进行粗提取。跟踪相邻点云数据,将同一条线路上的点云数据识别出来。根据其电力线点云走向的斜率变化确定电力线初步节点,将其节点连接成多段线,即为初步电力线,初步电力线的作用就是确立电力线的基本走向和形状。
(3)电力线精提取(精确提取各节点)
根据提取的初步电力线按照实际电力线点云对其节点准确提取。确保电力线与点云的实际位置贴近程度更高、更准确。精确提取电力线节点的原理就是根据电力线点云束状垂直截面上点云坐标确立截面的中心点。
(4)电力线平滑。
电力线提取后,其显示的仍然是一条多段线,因此最后的工作就是要对提取的多段线利用多元函数进行平滑处理,从而得到一条圆滑曲线,即最终电力线矢量化产品。
(5)电力线扩展。
利用电力线点云束提取并拟合出的中间电力线,根据实际电力线相互之间的间隔对其进行扩展拟合,从而最终获取四根或八根电力线束。
2 试验结果分析
为了评价基于机载LiDAR的电力线提取拟合的精度,以TopSysFacon-II获取的南方电网电力巡线LiDAR点云数据进行了试验,试验段为广西来宾段机载LiDAR点云数据中的一段,其中,机载LiDAR点云数据的点密度为每平方米平均20个激光点。采用电力设计软件PLS拟合的电力线与基于点云数据自动化提取的电力线进行比较。由于PLS内附电力线的各种力学方程,属电力线路设计方面的国际知名软件,加以人工干预拟合,因此,其精度近似认为为0,即其拟合的电力线坐标为真实电力线坐标。利用电力线点云提取的电力线与PLS拟合的电力线导入Cass软件里对其三维坐标进行比较。
试验段电力线束截面直径在40cm左右。通过侧面和俯视面分别对两条电力线进行高程和平面位移差进行比较,从而得出两条线的位置差别,差值比较表如表1。
由表1,基于LiDAR点云自动提取拟合的电力线平面和高程偏差基本上都在10cm以内,其偏差值在两端较小,中间较大,呈单峰分布,其主要原因可能由于中间段位电力线由于风力的影像而导致偏位较大,从而导致PLS拟合值与真实值有轻微偏动,最终导致自动提取的电力线与其手工拟合值偏动较大,但最终统计结果显示:其平面位置平均偏差分别为:0.06m、0.04m、0.06m、0.07m,高程平均偏差分别为:0.05m、0.07m、0.06m、0.06m,总偏差分别为:0.08m、0.08m、0.08m、0.09m。因此,我们可以得出结论:利用机载激光雷达获取的点云数据自动提取电力线的平面和高程误差在6cm左右,其总体误差在8cm左右。而对于截面直径只有40cm的线束来说,其半径为20cm,因此,可认为8cm的偏差对于半径20cm的线束来说,其拟合效果足以满足实际工程中的应用。
3 结语
由于激光脉冲的发散性,其获取的电力线等线状物的点云并不是呈现一条线性状,而是以电力线为中心的一条带弧度的线柱状点云集。本文就是从这种思想出发,提出了基于获取的电力线点云数据自动提取电力线的方法。
(1)根据电力线点云求取出垂直于电力线走向的法截面上的点云面中心点位置作为节点。
(2)根据各节点拟合出电力线。
该方法相比现有的基于电力线点云数据进行人工拟合电力线要更加方便快捷、准确,可用作计算电力线与线下植被距离测量的对象,另外还可作为数字电网中的模型等应用,为电力巡检带来一种新思路和新方法。
此外,机载LiDAR技术除了用在数字电网巡线外,还可以用于输电线路选线、排位设计、电力安全巡线以及数字电网运营管理等方面,相比于传统人工测量和摄影测量,机载激光雷达技术不仅大大提高了工作效率,而且在测量产品的应用方面也具有独特优势,需要进一步利用LiDAR系统获取的可见光影像、近红外影像对输电线路下的地表物点云数据进行自动或半自动分类,单独对兴趣点云数据(一般指植被、树木等)与电力线间的距离进行量测,根据树木生长的特性预估出其生长的高度极限,从而对其进行有计划的砍伐,避免其树木生长过高导致与输电线路的碰触危险。
参考文献
[1] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[2] 张小红.机载激光扫描数据滤波及地物提取[D].武汉:武汉大学,2002.
[3] 蔡喜平,赵远,黄建民等.成像激光雷达系统性能的研究.光学技术,2001,27(1):60-62.
[4] 黄朝华,鲍艳,黄斌.基于LIDAR技术的电力机载巡线测量系统[C].北京:测绘科技信息交流论文集,2007,4-5.
[5] 王平.输电线路应用直升飞机巡线维护试验研究[J].四川电力技术,2002,25(1):4-6.
[6] 陈功,程正逢,石克勤等.激光雷达在电力线路工程勘测设计中的应用[J].电力勘测设计,2006(5):53-57.
[7] 殷金华等,孙朝阳,郑彦春.机载激光测量技术在特高压输电线路工程中的应用研究[J].电力建设,2007,28(7):9-13.
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
中国电业与能源(2021年4期)2021-05-22
广西电业(2020年11期)2020-03-23
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
无人机(2018年1期)2018-07-05
电子制作(2017年14期)2017-12-18
电信科学(2016年11期)2016-11-23
电测与仪表(2015年3期)2015-04-09