一种失速保护系统推杆响应延迟问题的解决方案
2012-04-19 01:20傅璟裔
科技传播 2012年16期
傅璟裔
上海飞机设计研究院综合航电系统设计研究部,上海 200436
1 失速保护系统介绍
当飞机迎角超过一个临界迎角后,机翼上表面边界层将发生严重的分离,升力急剧下降而不能保持正常飞行的现象,叫失速。
失速保护系统的作用就是当飞机接近失速状态时,为机组提供警告,并防止飞机进入真正的失速状态。
对于高平尾民用飞机,失速保护系统提供失速振杆和推杆功能,通常由以下构成:
1)一个失速保护计算机;2)两个迎角传感器;3)两个振杆器;4)一个推杆器。
迎角传感器安装在机头两侧,伸出机体外部蒙皮,通过感受气流方向测量飞机的迎角;振杆器用于实现失速振杆功能,安装于正副驾驶员驾驶杆的根部;推杆器功能由自动驾驶仪的俯仰伺服执行功能。失速保护计算机对迎角传感器传输过来的原始信号进行处理和逻辑计算,通过数据总线将触发信号分别传输到航电系统、振杆器、推杆器等,从而实现失速振杆、失速推杆等功能。
在飞机接近失速时,任意一侧迎角增大并超过了失速振杆迎角阈值,失速保护系统接通相应侧的振杆器振动驾驶杆,向机组提供触觉的失速警告指示。同时还有图标、音响和灯光的指示。
如果两侧迎角均超过了失速推杆迎角阈值,推杆器(即俯仰伺服)就会工作,推动驾驶杆向前,飞机低头,防止飞机进入失速。
2 推杆延迟问题的发现及影响
在某机型的失速保护系统研究中,发现存在不同程度的推杆响应延迟问题,延迟出现无规律。
在实际航线飞行时,某些恶劣气候气象条件下,飞机往往抬头较快。若存在较大的推杆响应延迟,就可能发生失速保护系统未推杆,但飞机的迎角已超出了失速迎角,飞机进入失速状态,严重影响飞行安全。
若因为推杆响应延迟问题,减小系统内设置的推杆迎角阈值,从而保证飞机安全,则将大大影响飞机的性能。
另外,在SAE AEROSPACE STANDARD AS 403A中,对响应延迟也有明确的要求:失速感应装置发出激励与相应响应出现的时间延迟不能大于0.5s。
因此,无论从飞机安全、性能还是相关条款规定考虑,必须解决推杆响应延迟问题。
3 导致问题的原因分析
经过研究发现,输入给俯仰伺服的信号状态与伺服工作逻辑不相匹配,导致了该问题的出现。
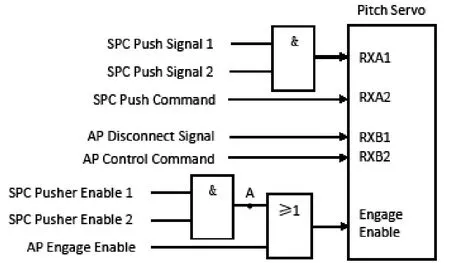
图1 俯仰伺服输入信号图
图1是俯仰伺服部分输入信号。图中可以看出,俯仰伺服有两个控制指令输入通道RXA和RXB。当RXA1输入为0时,RXA2无输入,当RXA1输入为1时,RXA2同步接收到控制指令,RXB通道的情况相同。伺服在同一时刻只能按照其中一路输入通道的控制指令工作。两个输入通道间的选择和转换关系如下:
1)当Engage Enable输入为0,伺服监控RXA通道的数据;2)当Engage Enable输入为1,伺服将在RXA和RXB通道之间转换,伺服每一秒钟转换一次监控的通道。直到监控到RXA1或RXB1为1的通道,转换停止并使用该通道的控制指令。
研究中发现,当航电系统上电后,AP Engage Enable始终为1,即Engage Enable输入始终为1。当任意一侧迎角达到失速振杆阈值,自动驾驶仪断开,AP Disconnect Signal置0,即RXB1输入置0。由于迎角的变化是一个连续的过程,所以在迎角数值由失速振杆阈值增加到失速推杆阈值的时间内,RXA1仍保持为0。这段时间内,伺服以一秒的周期在RXA和RXB通道间轮流转换,这就造成了伺服没有及时执行RXA通道的推杆命令,从而导致推杆响应延迟。
4 解决问题的方案
方案一:增加一个伺服,不再与自动驾驶仪共用伺服的方案。此方案中增加一个伺服用于实现失速推杆功能,伺服不需要在两个输入通道间转换,推杆响应延迟问题可解决。但增加一个伺服必然会增加飞机成本、重量,对电磁兼容环境、电气接口等造成很大影响。
方案二:在现有系统架构下解决该问题。依照俯仰伺服两个输入通道的选择和转换逻辑,将AP Engage Enable的输出逻辑修改为当自动驾驶仪接通时为1,自动驾驶仪断开时为0。这样在失速振杆触发但失速推杆未触发的情况下,Engage Enable输入为0,伺服直接监控RXA通道的控制指令,而不会在两个输入通道间轮流转换。
若使用方案二解决延迟问题,还应该在图1中A点处增加一个约20毫秒的迟滞时间。因为当两侧迎角均达到失速推杆迎角阈值时,SPC Pusher Enable 1与 SPC Pusher Enable 2和SPC Push Signal 1与SPC Push Signal 2应同时为1。但由于输出和总线传输的不同步性,A点处的信号(即SPC Pusher Enable 1与 SPC Pusher Enable 2)存在比RXA1的输入信号(即SPC Push Signal 1与SPC Push Signal 2)更先置1的可能性。若不增加迟滞时间,Engage Enable的输入可能早于RXA1置1,这样伺服又可能在两个输入通道间转换,造成推杆响应延迟。因此,在图1中A点处增加一个约20ms的迟滞时间,使得Engage Enable的输入晚于RXA1置1,伺服保持对RXA通道的监控,而不会在通道间转换监控。
5 实施后的效果
按第四节中方案二实施更改后,推杆延迟时间控制在条款要求的0.5s以内。推杆响应延迟问题得到有效解决。
[1]SAE AEROSPACE STANDARD AS 403A, STALL WARNING INSTRUMENT, 2008,2.
猜你喜欢
军民两用技术与产品(2021年8期)2021-11-24
装备维修技术(2021年37期)2021-11-03
北京航空航天大学学报(2021年6期)2021-07-20
现代电子技术(2019年15期)2019-08-12
中国惯性技术学报(2018年4期)2018-11-08
电子设计工程(2015年6期)2015-02-27
汽车科技(2014年6期)2014-03-11