基于模糊神经网络算法的交流伺服系统DSP控制*
2012-04-16 02:38:18乔维德
电气传动自动化 2012年4期
乔维德
(无锡市广播电视大学,江苏 无锡 214021)
1 引言
随着科技的进步和工业生产的需要,传统的直流伺服系统由于其结构复杂、不易维护的缺陷,正在被结构简单、容易维护的交流伺服系统所代替。交流伺服系统是由交流电动机组成,交流电机的数学模型具有较强的时变性、强耦合性和非线性等特点,所以应用传统的基于对象模型的控制方法难以进行有效的控制。
模糊控制和神经网络控制均属于智能控制的范畴,它们都不依赖于被控对象的数学模型,能够很好地克服系统中模型参数变化和非线性等不确定因素,具有较强的鲁棒性。但将它们分别应用到交流调速系统这种对系统精度和快速性要求很高的系统来说,两者都存在一定的缺陷。模糊控制的最大弱点是稳态精度低,如果要提高精度,必须增加模糊级数,这又会造成控制查询表过大和模糊关系的维数增大,从而影响系统控制的平稳性和实时性。神经网络控制由于需要在线学习、调整权值,其过渡过程较慢。为此,将模糊控制和神经网络结合起来形成的模糊神经网络应用于交流调速系统中的转速调节器,并针对模糊神经网络控制器运算量大、收敛慢的特点,硬件采用TMS320VC33高速数字信号处理器(DSP)芯片作为控制器运算单元,成功地完成了模糊神经网络控制器的DSP实现,提高了交流调速系统的控制性能。
2 控制系统结构
交流调速控制系统采用主从式结构,主要由上位机、下位机组成。上位机为PC机或者工控机,主要用于调速系统速度指令的给定和实时监控;下位机主要由DSP模块和交流异步电动机等组成,其中TMS320VC33 DSP芯片将DSP内核、A/D转换电路、时钟电路、看门狗电路、PWM电路、采样保持电路、串行接口电路等集中在一个芯片上,其性能好,运算速度快,精度高,价格便宜,是适用于电机调速系统实时控制的首选芯片。PC上位机和DSP下位机采用串行通讯传输数据,下位机根据命令对交流电机进行控制,整个控制系统结构简单,具有高可靠性和可扩展性。
调速系统控制框图如图1所示。为保持电流控制器的强干扰能力和快速性,电流控制器采用传统的PI调节器。电流控制器调节时,由当前电流的测量值与转速控制器输出的误差值按PI算法调节PWM发生器输出参数,并对电机最大电流进行限幅控制。速度控制器是系统的主要控制环节,为增强系统抗负载扰动能力,抑制速度波动,提高系统的动静态性能,速度控制器采用模糊神经网络控制器。

图1 控制系统框图
3 模糊神经网络控制器结构
本文设计的模糊神经网络控制器由一个在模糊集上理论基础上的五层神经网络构成。
第一层为控制器的输入语言变量E和EC,其中E和EC分别是速度给定与实际测量值的速度误差与误差变化率。E和EC的语言值均选取为{PB,PM,PS,ZE,NS,NM,NB},即{正大,正中,正小,零,负小,负中,负大},论域在[-6,6]上连续取值。该层的作用是将输入变量直接转换到下一层,输入信号权值取1。
第二层为控制器的输入语言变量的隶属函数层,隶属函数μ(x)采用正态分布形式,即

式中mij和hij分别表示第i个输入变量中的第j个元素的隶属度函数的均值和方差,Ii(2)表示第2层神经元的第i个输入。
第三层为模糊控制规则推理层。根据交流调速系统运行特性,确定如下形式模糊控制规则:

其中if中的“X is A and Y is B”称为前件部分,而then部分的“Z is C”为后件部分。
本层中每个神经元的输入用来实现每个模糊控制规则的前件部分,神经元的输入函数采用“与”逻辑运算关系,分别计算每条规则的前件部分中相应的模糊语言变量隶属度。
第四层为输出语言变量U的隶属函数。本层每个神经元输入用来完成每个模糊控制规则的结果,即后件部分。各输入神经元之间取“或”逻辑关系,总结得出的模糊控制规则如表1所示。
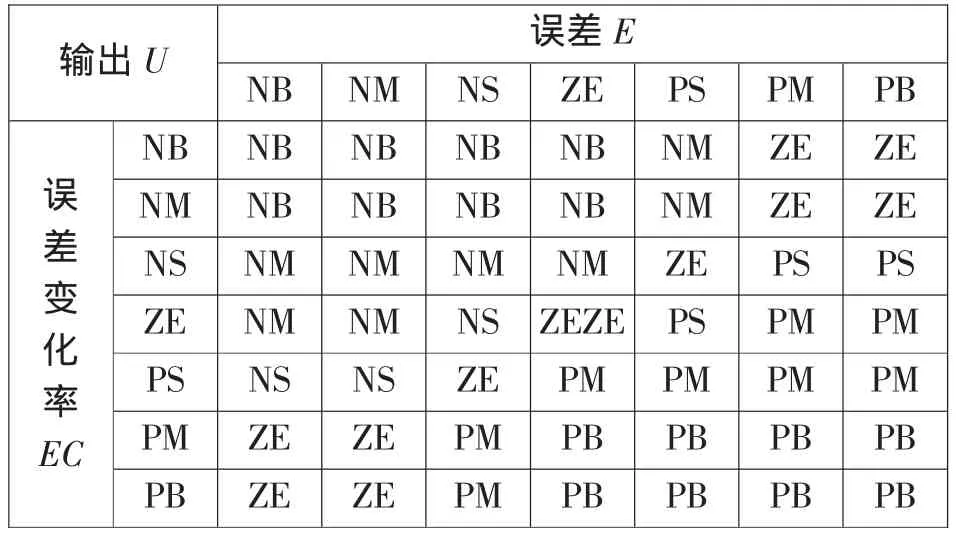
表1 模糊控制规则表
第五层为控制器的输出变量,采用加权平均法完成模糊判决功能。
4 模糊神经网络算法的学习
本系统中需要学习的参数主要是网络的连接权ωij(j=1,2,…7,i=1,2,…7,k=1,2,…49)和隶属函数的均值mij和方差hij(i=1,2,…7,j=1,2,…7)。定义误差评价函数为:
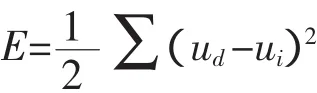
式中:ud和ui分别表示网络的期望输出和实际输出,参数ωij、mij、hij的学习算法采用神经网络反向传播算法,即
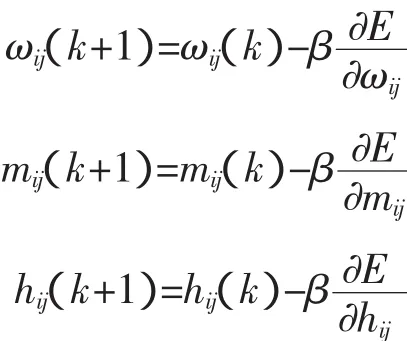
式中:β为学习效率,k为所加的学习样本号。
5 模糊神经网络控制算法的DSP实现
5.1 硬件设计
模糊神经网络控制器的硬件实现选用TMS320VC33芯片。使用CC3x开发工具,把汇编语言或C语言编写的控制算法经编译联接转变为DSP能接受的COFF代码文件,送到DSP芯片上执行控制。该目标代码写入到DSP系统的FLASH中,当DSP系统上电后通过BOOT程序引导到高速RAM执行。
通过A/D转换将采集的速度反馈信号转换化数字信号,DSP经过模糊神经运算得到控制信号,由D/A转换输出对交流伺服系统加以调速控制。PC机通过TDS-TMS320仿真器的JTEG接口来捕获系统控制中的状态变量与数据,实时监控控制系统的性能。
5.2 软件设计
软件采用功能模块设计方法,由系统主程序和中断服务程序组成。为规定学习算法精度和收敛条件,将连续两次采样周期的最大跟踪误差emax与最小跟踪误差emin相比较,当满足|emax-emin|<0.01 时,学习停止。程序流程如图 2、3所示。

图2 主程序框图
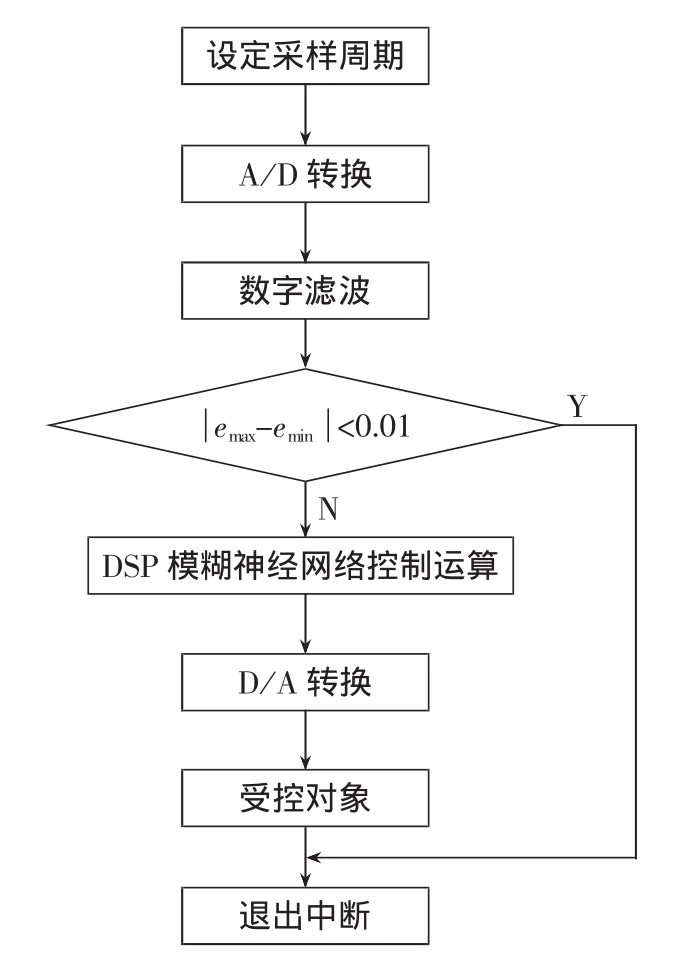
图3 用中断实现的控制算法流程图
5.3 系统抗干扰措施
交流调速系统往往长期工作于环境恶劣的工业现场,有的还易受电磁辐射的干扰和影响,所以抗干扰措施必不可少。主电路中,三相电路后端设置滤波电路,用来消除或削弱噪声干扰及电路本身因素的干扰。在控制电路中,在输入、输出端口全部采用高速光电耦合器件隔离外围电路与DSP数字电路之间的电联系,所以传输导线使用双绞线;电源输入端增设电源滤波器,在DSP芯片内利用监时定时器实现软件抗干扰。
6 实验研究
用于实验的交流电机参数为:额定功率Pn=2.2kW,额定电压 Un=220V,额定电流 In=5A,额定转速 nn=1500r/min,定子电阻 Rs=2.84Ω,转子电阻Rr=2.96Ω,定子电感 Ls=0.45694H,转子电感 Lr=0.45694H,定转子互感 Lm=0.42415H,额定电磁力矩 Ten=14N·m,转子极对数 np=2,电磁惯量 J=0.002276kg·m2,额定磁通 ψn=0.96wb。数字控制采样频率为10kHz。图4为系统在给定转速nr=1500r/min、负载转矩 TL=2N·m 时起动,并在 t=0.7s时给电机加一个10N·m负载时,分别以模糊神经网络控制器和PI控制器作为速度调节器情况下的电机速度响应曲线,曲线①、②分别表示PI控制器和模糊神经网络控制器作用下的转速响应曲线。从图中可以看出,无论是响应速度,还是超调量,②曲线均优于①曲线,说明本文采取的控制策略能对被控对象实现较好的控制效果。
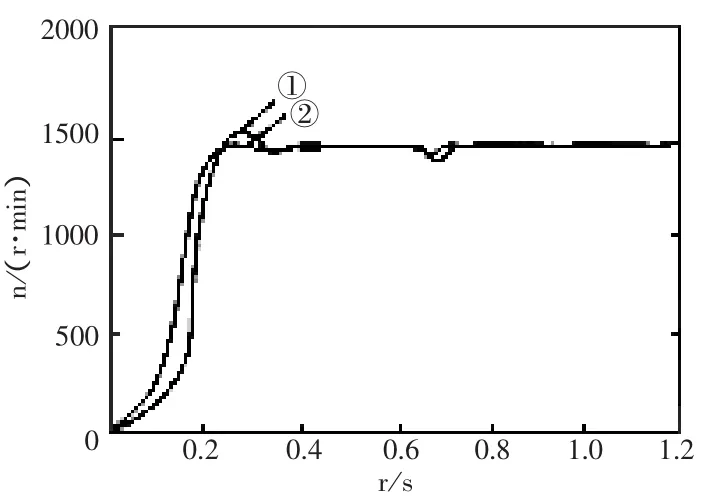
图4 nr=1500r/min时PI和RFNN控制器的速度响应曲线
7 结束语
本文提出基于高性能高精度的DSP芯片的模糊神经网络控制方法,并引入到交流伺服系统的调速控制中,能够很好地克服伺服电机中非线性、时变、耦合等因素的影响,提高了系统的控制性能。实验结果表明,采用模糊神经网络控制器作为转速控制器的交流调速系统的具有较好的动静态特性,而且在负载发生变化的情况下,该控制器仍然保持较强的适应性和鲁棒性,取得了较为理想的控制效果。
[1]薛 薇,李 力.基于DSP的PH过程FNNC-PI控制器实现[J].化工自动化及仪表,2005,32(1):58-61.
[2]冯冬青,李小雄.基于DSP的轧机调速系统模糊神经控制[J].郑州大学学报(工学版),2003,24(3):17-20.
[3]乔维德.基于模糊神经网络的交流伺服系统[J].电气传动自动化,2007,29(5):29-31.
[4]毛六平,王耀南,孙 炜,等.一种递归模糊神经网络自适应控制方法[J].电子学报,2006,34(12):2285-2287.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
测控技术(2018年12期)2018-11-25 09:37:44
发明与创新(2016年23期)2016-10-13 02:16:14
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
电源技术(2015年11期)2015-08-22 08:50:38
弹箭与制导学报(2015年1期)2015-03-11 15:32:18