模糊自适应PID控制在高炉TRT系统中的仿真研究
2012-03-28 01:52郭敏
电子设计工程 2012年14期
郭敏
(榆林学院能源工程学院,陕西榆林719000)
高炉炉顶煤气余压回收透平发电装置(TRT)作为一种高效的二次能源回收装置,其运行的前提是必须确保高炉顶压的稳定性。传统高炉TRT顶压控制系统主、副回路大多采用经典PID控制,存在PID参数调节不便、抗扰动性不强以及对时变对象的适应能力差等问题,控制效果很难达到期望水平。考虑到TRT顶压控制系统稳定性的影响因素比较复杂,被控过程存在复杂性,高度非线性,时变不确定性等特点,且静叶对高炉的顶压调节存在一定的滞后,本次设计结合传统PID和现代模糊控制的优点,应用模糊推理的方法实现对高炉TRT顶压控制系统中PID参数的自动整定,以期改善控制效果,达到对高炉顶压的稳定控制。并最终通过MATLAB仿真,验证了该优化控制算法的可行性。实验证明,该优化控制算法对高炉顶压控制系统的控制效果明显优于传统PID。
1 模糊自适应PID控制原理及结构
模糊自适应PID控制方法的基本原理是:以误差e和误差变化ec作为输入,通过在运行中不断检测e和ec,并利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整,来满足不同时刻的e和ec对PID参数自整定的要求,利用模糊规则在线对PID参数进行修改,以使被控对象具有良好的静态、动态性能[1-2]。模糊自适应PID控制系统结构如图1所示。

图1 模糊自适应PID控制器结构Fig.1 Structure of the fuzzy adaptive PID controller
较大的ΔKP和较小的ΔKD。同时,为了防止积分饱和,避免系统超调过大,应限制ΔKI的大小或使其为零。
2 模糊自适应PID控制的设计实现
在本次设计中,基于高炉TRT顶压控制系统的模糊自适应PID控制算法的具体设计包括:模糊控制中精确量的模糊化及隶属度函数的确定、模糊控制规则及模糊推理关系的建立、模糊控制查询表的制作和解模糊判决。下面分别介绍各个部分的具体设计:
1)精确量的模糊化及隶属度函数的确定在本系统中,输入量即炉顶压力误差e及误差变化率ec的真实论域分别取为[-10,10],[-5,5],定义两者所对应的模糊集论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},并取相应论域上的语言值为{NB,NM,NS,ZO,PS,PM,PB}。由此可得量化因子ke和kec的值分别为0.6和1.2。
对于本系统中模糊集合隶属函数的选取,考虑到隶属函数对论域的覆盖程度及灵敏度,鲁棒性和稳定性等原则,选择了三角形隶属函数。
2)建立模糊控制规则和构造模糊推理关系
模糊控制规则采用“if e is A and ec is B then KPis C and KIis D and KDis E”的方式,参数的模糊推理过程采取Mamdani直接推理法。根据高炉TRT顶压控制规律的实际经验及PID参数的调整原则,建立了147条推理规则,其中ΔKD的模糊控制规则如表1所示。
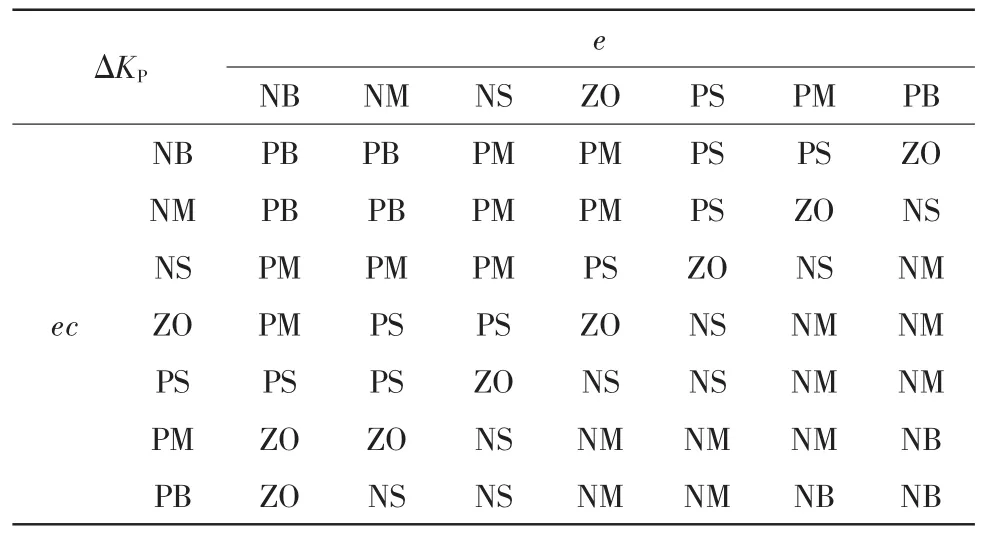
表1 ΔKP的模糊控制规则表Tab.1 Table of the fuzzy control rules of ΔKP
3)模糊控制规则查询表的制作
在高炉TRT顶压控制系统的设计中,为了加快控制器的运算速度,模糊控制规则矢量表的设计采用了离线计算,在线查表的方式,即先通过计算将设计好的模糊控制规则表以表格的方式存入计算机,然后在系统运行的过程中经检测输入量的误差及误差变化量并直接调用查询得到对应控制量增量在其模糊集论域上的相应值。模糊控制规则矢量表的制作步骤如下。
①输入变量隶属度的确定
由模糊控制器输入变量的三角形隶属度函数曲线,可得输入变量e和ec隶属度矢量表。因本次设计中e和ec采用了相同的隶属度函数,因此所得的隶属度矢量表也是相同的,如表2所示。
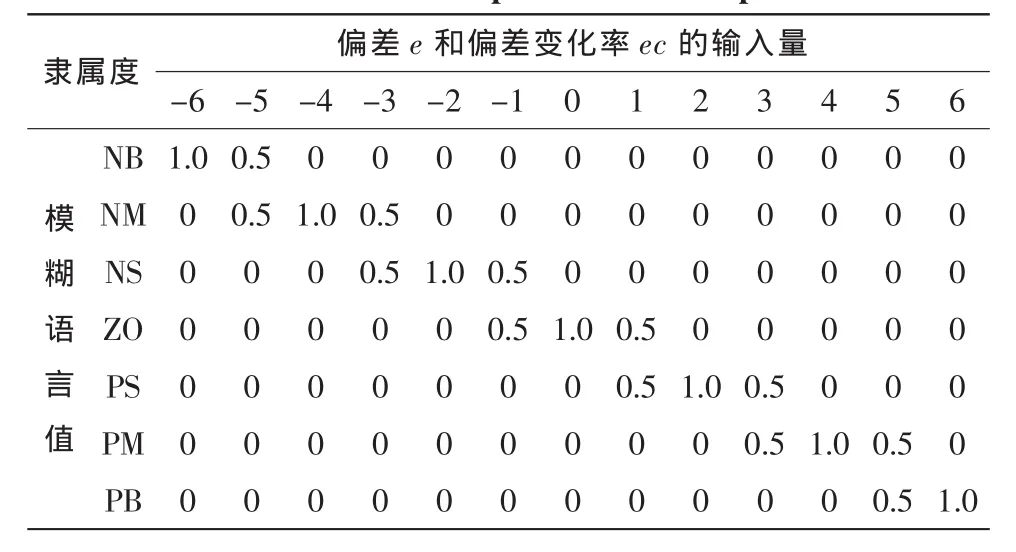
表2 输入变量的隶属度矢量表Tab.2 Table of m em bership vector of the input variables
②控制规则矢量表的确定
本次设计采用二输入三输出的模糊控制器结构,且输入/输出变量的模糊集论域均为[-6,6],因此需制定3个13×13的二维模糊控制矢量表。
在已知输入误差e和误差变化率ec的情况下,查表2得到e和ec的模糊集论域元素所对应的模糊语言值以及对应的隶属度,并对得到的e和ec的模糊语言值分别进行组合,形成不同的控制规则,这些控制规则会相应地激活表1中与之相同的控制规则并获得相应的控制量值。其中,各条控制规则中控制量的模糊语言值是通过查询控制规则表得到的,而控制量的隶属度值则是根据规则蕴含的“最小”操作运算得到的,即取的是2个模糊输入量对应的隶属度的最小值。其中以模糊控制输出量ΔKP为例的控制规则矢量表如表3所示。
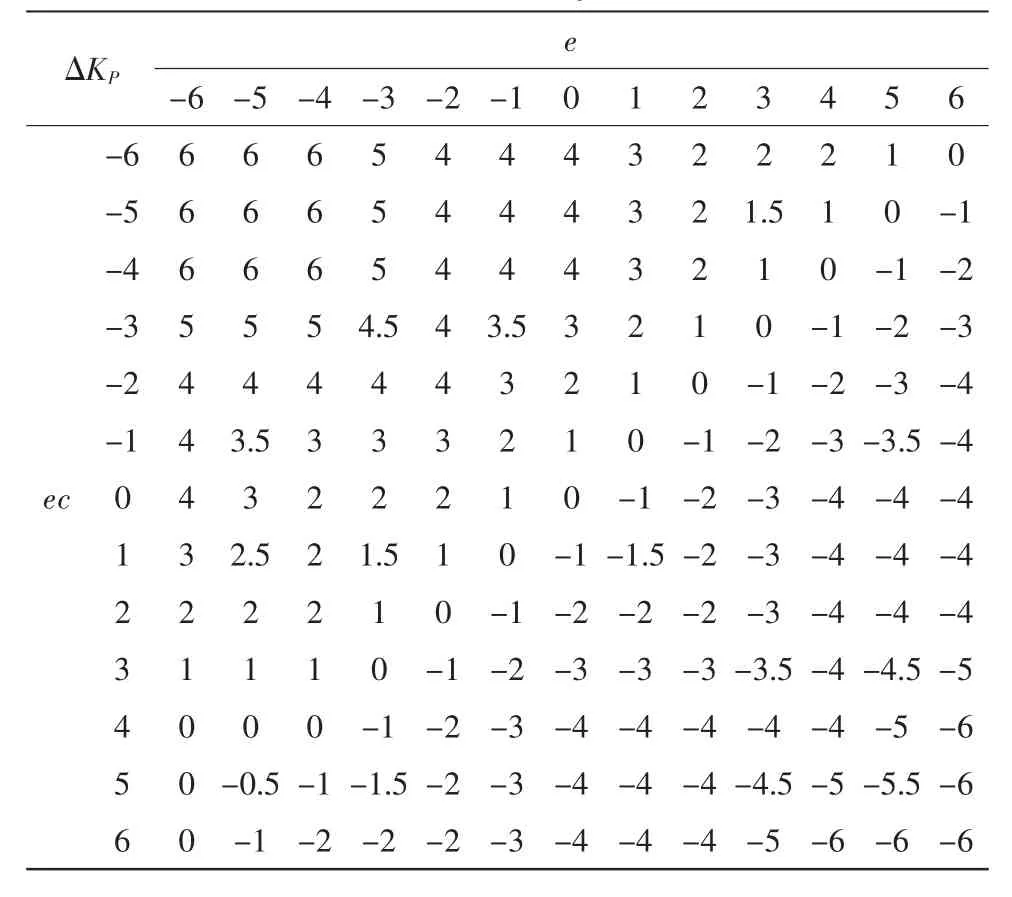
表3 ΔKP的模糊控制规则矢量表Tab.3 Vector table of the fuzzy control rules of ΔKP
4)精确输出量的解模糊判决
本系统精确输出量的解模糊判决采用重心法,其输出的控制量是PID控制中3个参数KP、KI、KD的调整量或者说是修正值。利用该调整量对PID中的3个参数进行动态整定,其整定公式如下:


其中,ΔKP、ΔKI、ΔKD为参数的修正值,KP′、KI′、KD′为常规PID的预整定参数值。
3 高炉TRT动态模型的确立
高炉TRT正常运行工况下的顶压控制过程的研究是分析TRT装置运行过程中顶压稳定性的基础。本次设计以正常运行工况下的TRT系统为研究对象,在查阅大量参考文献的基础上,结合TRT装置的特点,并考虑影响高炉顶压稳定性的主要因素,对高炉TRT系统进行合理的简化处理,将正常工况下高炉顶压的主要扰动(高炉间歇上料操作)引入模型,最终所确立的正常工况下高炉顶压的动态模型如下:

上式中,P为炉顶压力,U为透平机可调静叶开度,D为上料扰动。
其中,高炉顶压数学模型,即其传函为:

4 模糊自适应PID在高炉TRT顶压控制系统中的MATLAB仿真

利用MATLAB的Simulink和Fuzzy logic toolbox工具箱对所设计的模糊自适应PID高炉顶压控制系统进行仿真验证,确保控制效果的有效性。
在Simulink环境中建立的仿真模型如图2所示。
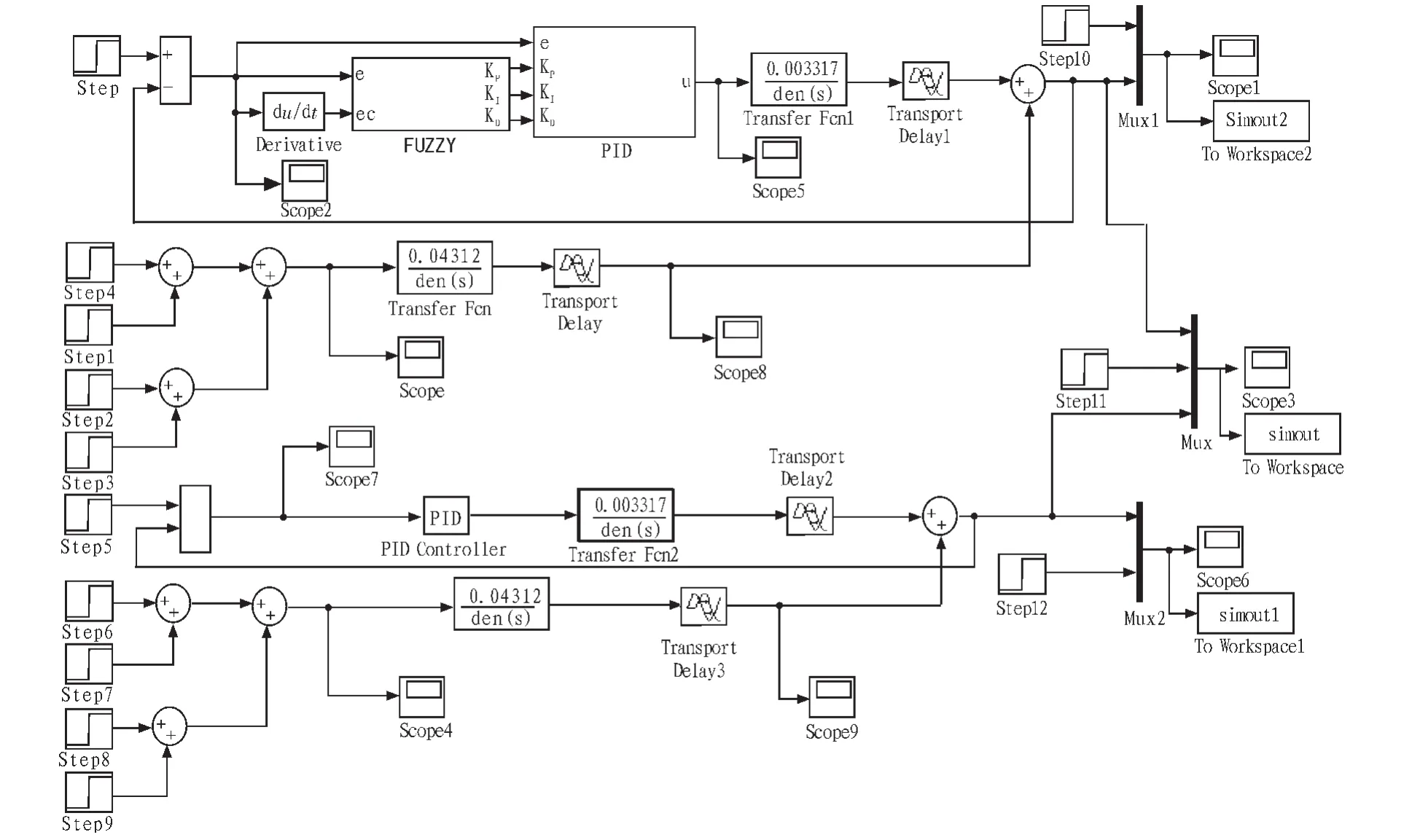
图2 高炉TRT顶压控制系统模糊自适应PID仿真模型Fig.2 Simulation model of fuzzy adaptive PID control of blast furnace TRT top pressure system
其中,FUZZY子模块和PID子模块的模型分别如图3和图4所示。
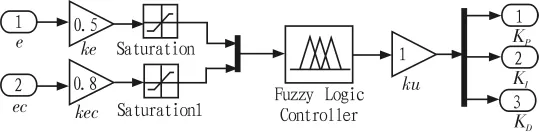
图3 FUZZY子模块仿真模型Fig.3 Simulation model of fuzzy sub-module
在模糊子模块的仿真模型中,量化因子ke和kec的取值分别为0.5和0.8,比例因子ku的值为1,均是在初值的基础上通过多次试调确定的。
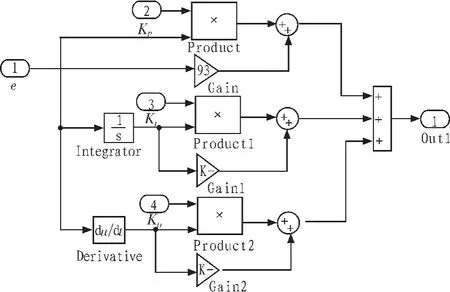
图4 PID子模块仿真模型Fig.4 Simulation model of PID sub-module
PID子模块中的KP、KI、KD参数值则是通过稳定边界法确定初值,然后经反复试调确定的,其值分别为93,3.001 8和100。
高炉TRT顶压一般为100~300 kPa,在此设定为100 kPa;顶压控制系统中的主要干扰变量——高炉间歇上料操作一般300 s左右一次,在此,选择了2个上料周期内的炉定压力变化值进行仿真。在每个周期内上料时间大约持续40 s,上料操作对炉顶压力影响的滞后时间大约为6 s;静叶通道的滞后时间大约为2 s。因此,在仿真模型中,分别在100~140 s和400~440 s之间加入了+1的干扰源,并通过干扰传函加到了顶压控制系统中。仿真结果如图5所示。

图5 高炉TRT顶压模糊自适应PID控制系统仿真结果Fig.5 Simulation results of fuzzy adaptive PID control of blast furnace TRT top pressure system
为了进一步验证模糊自适应PID控制算法的控制效果,在此,对该算法与传统PID控制算法进行了仿真比较,结果如图6所示。
通过对模糊自适应PID控制效果与传统PID控制效果的比较分析,可以看出模糊自适应PID控制算法较之传统PID控制算法具有过渡过程时间短,响应速度快,超调量小,抗干扰性强等优点,对高炉TRT顶压控制系统具有较好的控制效果[6]。
5 结论
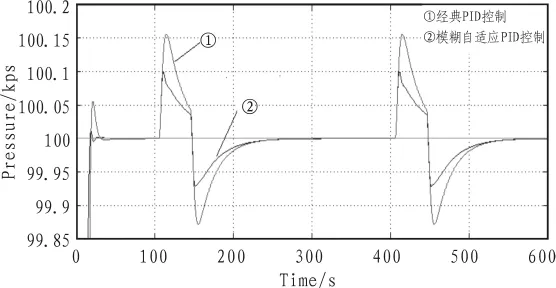
图6 模糊自适应PID与传统PID控制系统仿真比较Fig.6 Simulation results Comparison of fuzzy adaptive PID with traditional PID control
本次设计在高炉TRT顶压控制系统特点的基础上,设计了模糊自适应PID优化控制算法,并利用MATLAB的Simulink和Fuzzy logic toolbox工具箱对该优化控制算法进行了仿真验证。结果表明,与传统的PID控制算法相比,模糊自适应PID控制算法更适合于高炉TRT这种复杂的控制系统,具有动、静态性能好,参数时变适应力强,实时计算量小,调校方便等特点,市场应用前景较为广阔。
在控制器的设计过程中仍存在一些问题,如模糊规则和隶属函数的优化、系统抗干扰性能的增强等。因此,仍需进一步对该模糊自适应PID控制算法进行修改和完善。
[1] 诸静.模糊控制原理与应用[M].北京:机械工业出版社,1995.
[2] 陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[3] 张国良,曾静,柯熙政,等.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002.
[4] 印建安.高炉煤气余压发电装置中炉顶压力稳定性分析与控制试验研究[D].杭州:浙江大学,2003.
[5] 李婷婷.正常工况下TRT系统高炉顶压建模与控制[D].杭州:浙江大学,2007.
[6] 李战明,张春亮.阳极焙烧排烟架的模糊PID复合控制[J].工业仪表与自动化装置,2012(1):72-75.LI Zhan-min,ZHANG Chun-liang.Study on the hybrid fuzzy PID control in exhaust ramp[J].Industrial Instrumentation&Automation,2012(1):72-75.
猜你喜欢
山东冶金(2022年3期)2022-07-19
新疆钢铁(2021年1期)2021-10-14
成都信息工程大学学报(2021年6期)2021-02-12
山东冶金(2019年3期)2019-07-10
测控技术(2018年10期)2018-11-25
制造技术与机床(2017年6期)2018-01-19
广东石油化工学院学报(2016年3期)2016-05-17
新疆钢铁(2016年3期)2016-02-28
电源技术(2015年9期)2015-06-05
体育科学研究(2015年5期)2015-02-28