
舰载机综合光电着舰引导信息融合
2012-03-24 13:44谭乐祖刘新科
海军航空大学学报 2012年2期
王 杰,谭乐祖,毕 波,刘新科
(1.海军航空工程学院 a.训练部;b.指挥系,山东 烟台 264001;2.海军大连舰艇学院政治系,辽宁 大连 116018)
舰载机是大型舰船遂行各种作战任务和履行使命的主要手段,舰载机着舰是其作战活动过程的重要环节,技术要求高,风险大。提高舰载机着舰引导信息的精度,向飞行员提供更加精确的着舰数据,可以最大限度降低舰载机着舰风险[1-2]。
目前,大型舰船上的舰载机着舰引导系统主要有电子着舰系统和光学助降系统[3],电子着舰系统主要通过精密雷达和机载设备提供飞机相对大型舰船的位置、速度信息和飞行状态,光学助降系统是通过大型舰船上的灯光信号,给飞行员提供正确的着舰下滑轨迹。
1 着舰系统提供的引导信息
假设oxyz为着舰点坐标系,如图1所示。x轴与甲板中心线平行,z轴垂直于甲板向上,y与x、z 构成右手坐标系。在着舰点坐标系中舰载机的真实方位仰角、方位偏航角和斜距。
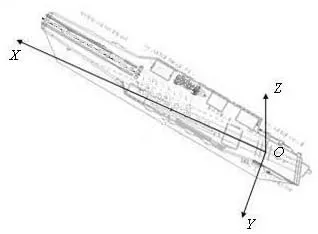
图1 着舰点系坐标
方位仰角信号为:

方位偏航角信号为:

斜距信号为:

电子着舰系统方位仰角信号为:

式(4)中:ϑelec为电子着舰系统方位仰角信号;ϑreal为真实方位偏航角信号;Δwϑ,g为高斯白噪声信号。
电子着舰系统方位偏航角信号为:

式(5)中:ϕelec为电子着舰系统方位偏航角信号;ϕreal为真实方位偏航角信号;Δwϕ,g为高斯白噪声信号。
电子着舰系统斜距信号为:

式(6)中:lelec为电子着舰系统斜距信号;lreal为真实斜距信号;Δwl,g为高斯白噪声信号。
IFLOLS 光学助降系统能够向舰载机提供的着舰信息为下滑航路(光路)。
根据实际情况可知,舰载机大部分时间会处于规定的理想下滑轨迹区域内,偏离理想下滑区域的时间同偏离的角度成反比,即偏离的角度越大,舰载机在相应灯光区域内停留的时间就越短。通过以上分析,建立IFLOLS 光学助降系统纵向灯光量化模型为:

式(7)中:Δϑlight为量化的光学助降系统纵向灯光信号偏差;Δϑreal为模拟的真实轨迹方位仰角偏差;Y为灯光信息量化值;k1为比例系数;tY为舰载机在某种频率颜色灯光中停留的时间;Δϑ0为单位时间方位仰角变化量,为简便起见暂设为一值很小的常量;ωm1为马尔科夫噪声;tY=n1⋅T,n1为周期数,T为采样周期,灯光频率或颜色改变或者为橙色稳定光则tY置零。
IFLOLS 光学助降系统横向灯光量化模型为:

式(8)中:Δϕlight为量化的光学助降系统侧向灯光信号偏差;Δϕreal为模拟的真实轨迹方位偏航角偏差;S为灯光信息量化值;k2为比例系数;tS为舰载机捕获到某一颜色、某一数量灯光信号持续的时间,tS=n2⋅T,n2为周期数,T为采样周期,灯光数量或颜色改变或者灯光为黄色光则tS置零;Δϕ0为单位时间方位偏差角变化量,简便起见暂设为一值很小的常量;ωm2为马尔科夫噪声。
利用上面两个模型,可以将光学助降系统灯光信号进行量化,得出相应的方位仰角和方位偏航角信息,为接下来实现信息融合做好准备。
2 着舰引导信息融合
由于着舰系统直接向舰载机提供的输出信号有舰载机相对大型舰船的方位仰角、方位偏航角以及斜距,因而将着舰系统的这3个量作为观测量[4-5]。估计的状态应该同观测量相关,考虑方位仰角和方位偏航角之间关系的复杂性,由观测量直接估计方位角很难实现,因而采用间接估计的方法。首先,估计出舰载机的坐标和速度信息;再换算成方位角和斜距供着舰使用[6-7]。因此,选取的状态变量为:

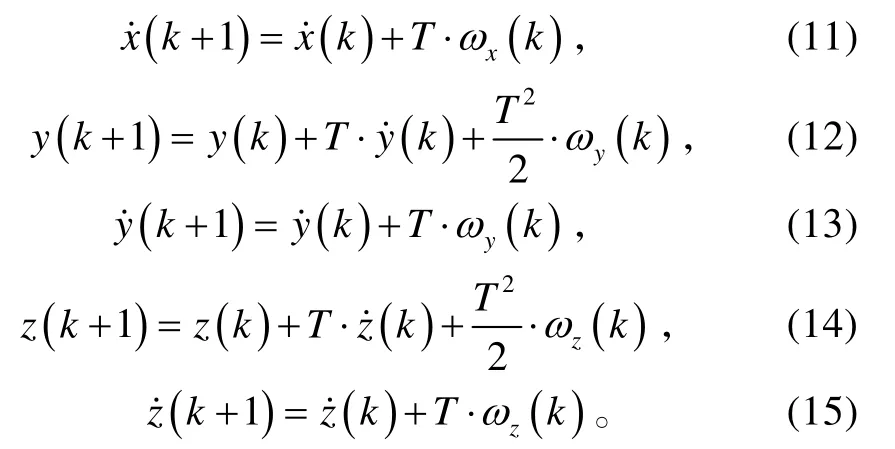
舰载机着舰过程的状态空间模型可以用如下两个方程描述:

在着舰点系,舰载机着舰过程离散状态方程

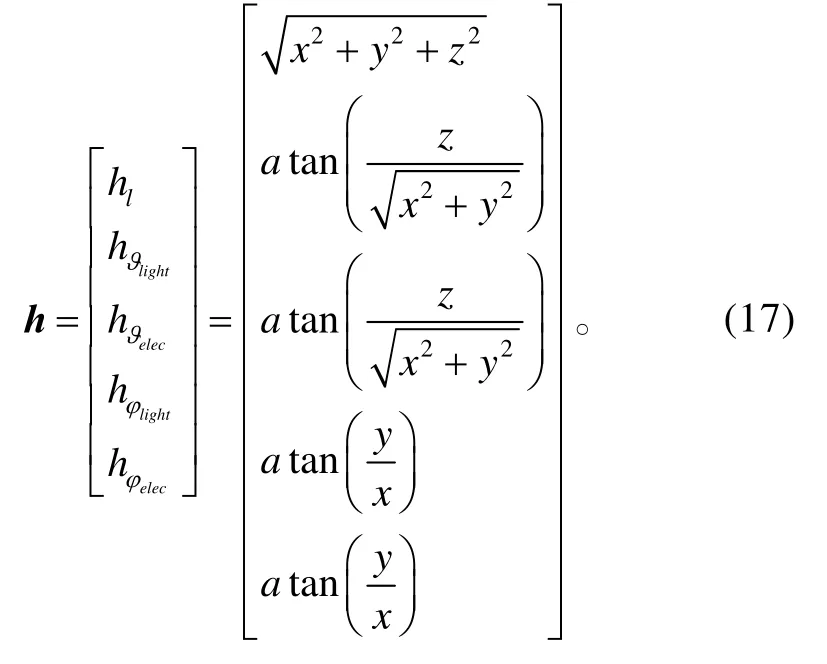
已知的观测量Z为电子着舰系统提供的斜距信息、方位仰角信息和方位偏航角信息以及光学助降系统提供的方位仰角信息和方位偏航角信息。

由于舰载机坐标偏差同方位角之间不是线性关系,因而只能列写它们的转换关系:
3 仿真验证
根据文献[5],电子着舰系统的采样周期10 ms,舰载机摄像头的采样周期可以为20 ms,而本文考虑的是着舰阶段最后的0~3 km,飞机进场时的速度为220~280 km/h,整个过程大约持续1 min,所以选定采样周期为10 ms,共进行6 000次采样。
选取状态初值为x0=[3 000,82,0,1,200,2]T。
关于3个方向的位置偏离情况,见图2~4,可以看出,滤波位置能够精确跟踪真实位置。
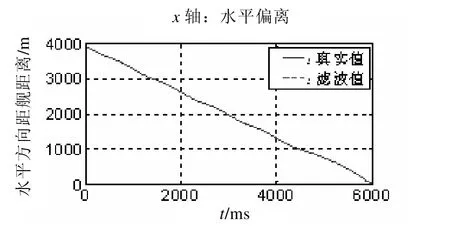
图2 x轴滤波值
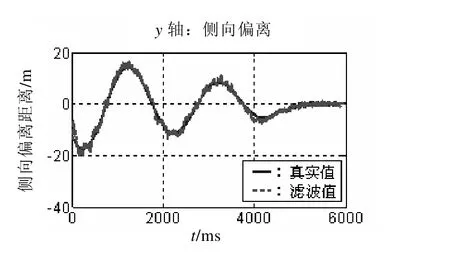
图3 y轴滤波值
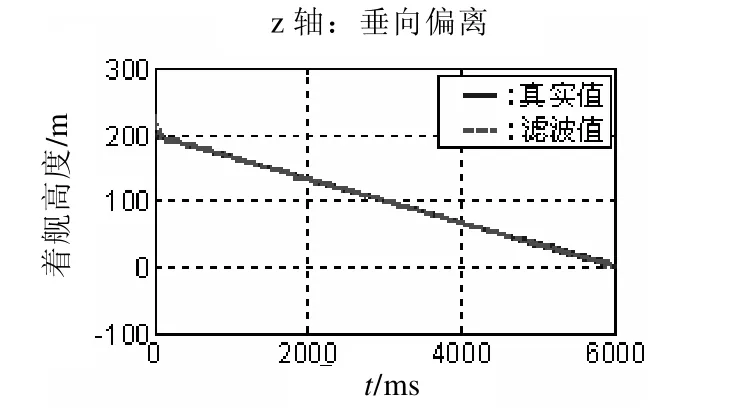
图4 z轴滤波值
4 结论
本文将电子着舰系统和光学助降系统输出的引导信息进行融合,提供了精确的着舰引导信息,并通过仿真验证了算法的高精确性,为以后舰载机着舰研究提供了有益的参考。
[1]张小苗,尚洋,雷志辉,等.一种基于单幅跑道图像的无人机降落位姿测量新方法[J].国防科技大学学报,2008,30(1):19-24.
[2]王晓剑,潘顺良,宋子善,等.无人直升机自主着舰的计算机视觉技术[J].北京航空航天大学学报,2007,33(6):686-689.
[3]彭秀艳,赵希人.舰载机起降指导技术研究现状及发展趋势[J].机电设备,2006,23(2):12-15.
[4]高青.多传感器数据融合算法研究[D].西安:西安电子科技大学,2008.
[5]骆光明,等.数据链——信息系统连接武器系统的捷径[M].北京:国防工业出版社,2008:42-46.
[6]余勇.精确着舰引导及复飞技术研究[D].南京:南京航空航天大学,2003.
[7]朱晓娟.飞行控制系统多传感器信息融合技术研究[D].南京:南京航空航天大学,2008.
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
幼儿园(2021年12期)2021-11-06
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
初中生世界·九年级(2020年2期)2020-04-10
中学生数理化·中考版(2016年2期)2016-09-10
科技视界(2016年15期)2016-06-30
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
航天返回与遥感(2014年1期)2014-07-31
红领巾·成长(2009年8期)2009-01-12
