
基于模糊PID的静变电源控制技术研究
2012-03-21 05:12樊波牛江川程培源吴家梁
电子技术应用 2012年6期
樊波,牛江川,程培源,吴家梁
(空军工程大学导弹学院,陕西三原713800)
近年来,随着电力电子技术的发展,静变电源越来越广泛地应用于工业、军事、医疗、航空航天等领域。在某型地空导弹武器系统中,静变电源是主要的设备之一,是整个武器系统电能的来源,能否可靠不间断地供电直接影响武器系统性能的发挥。设计高性能变频电源是当前的趋势之一,静变电源的高性能主要表现在稳压性能好、输出电压波形质量高、负载适应性强、动态特性好等方面。为了获得高质量的正弦输出电压波形,人们将现代控制理论应用到静变电源系统的控制中,提出了很多基于调制策略的控制方法。
PID控制器结构简单,鲁棒性强,目前在很多方面都有着广泛的应用。但是随着科学技术的进步,被控对象变得越来越复杂,利用传统的PID控制器往往得不到较好的控制效果。为了改善常规PID的控制效果,增强系统的适应性,本文设计出一种调整系统控制量的模糊PID控制器,模糊控制对于克服系统的非线性、时变性具有一定的优势。本文结合静变电源控制系统的特点,采用模糊PID控制算法,提高了静变电源输出电压波形的质量,使系统兼具良好的动、静态性能。
1 模糊PID控制器的设计
1.1 传统PID控制原理与出现的问题
经典增量式PID 的控制算式为:

其中:Kp、Ti、Td分别为比例系数、积分时间常数、微分时间常数。也可将式(1)描述为:

式中KP、KI、KD分别为比例、微分、积分系数;f[·]是与KP、KI、KD、u(k-1)、y(k)等有关的非线性函数。
离散化后的PID控制算式为:


式中Δe(k)=e(k)-e(k-1),采用增量式PID控制算法时,计算机输出的控制增量Δu(k)对应的是本次执行机构位置的增量。当计算机出现故障时,执行机构仍保持在前一步的位置上,使得系统的安全性与可靠性更高。对应实际的控制量,目前较多利用式(3)来完成。
增量式PID控制器参数一经确定后就不再改变,参数没有自适应环境变化的能力。然而,在实际工业生产过程中,静变电源的输出电压具有非线性、时变性和不确定性,而且所带负载常常发生变化,使得控制对象和模型失配,传统PID控制器参数往往优化不良,控制效果欠佳。为了克服传统PID控制系统的缺陷,引入了模糊控制与PID控制相结合的方法,以改善系统的跟踪效果,获得期望输出。
1.2 模糊PID控制策略
根据以往经验,静变电源输出电压波形质量与调制波信号密切相关,当输出电压波动很大时,如采用常规的PID控制器,其控制性能可能会变差甚至不稳定。因此,为了实现控制器的自适应能力,提出了基于模糊PID算法的静变电源的直接电压控制方法。
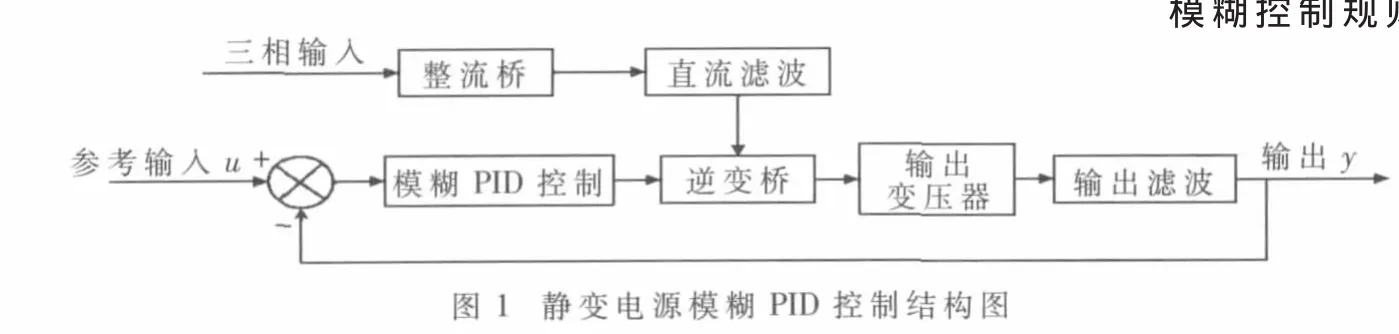
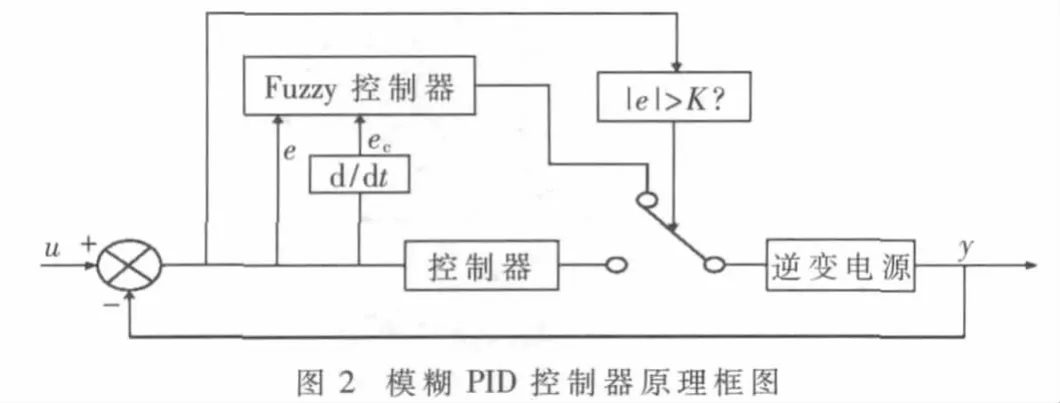
静变电源的模糊PID控制原理如图1所示,将期望值与实际输出值的误差信号经过模糊PID调节后,分析误差信号产生调制波,再经三角载波调制后生成PWM信号控制逆变桥,使系统输出信号逼近期望值,模糊PID控制原理如图2所示。
模糊控制器的实现首先应定义输入输出变量的模糊集,确定各变量论域,建立模糊变量赋值表,即模糊化;然后根据实践和学习积累的经验,归纳出若干条控制规则,根据控制规则进行模糊推理,采用最大隶属度法,对输出加以清晰化处理。
1.2.1 模糊化
单相逆变电源采用二维模糊控制,需要考虑的论域有三个:输出电压偏差、偏差变化率以及控制量,选取电压偏差、偏差变化率作为输入。其中:

式中,y为输出值,urin为给定值,T为采样周期。
首先应对这些论域进行模糊化,采用Mamdani提出的标准化设计方法,在电压误差控制中,将此三种论域离散为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6]13个等级,e和ec会在正、反两个方向变化,可将[-6,6]分为负大NB、负中NM、负小NS、零ZE、正小PS、正中PM、正大PB这7个语言变量值。
根据实际经验,把测量偏差e的基本论域[-Xe,Xe]、偏差变化率ec的基本论域[-Xc,Xc]以及控制量u的基本论域[-Xu,Xu]量化到区间[-6,6],这样就可以得到量化因子Ke、Kc和比例因子Ku。

然后根据离散化公式,将基本论域量化到量化论域中,具体的做法是:当基本论域是[a,b],量化论域是[-n,n]时,n取6,利用式(8)实现量化:

1.2.2 模糊控制的隶属函数和控制规则的确定
模糊控制规则应根据系统期望的动、静态特性来确定,即当偏差较大时,控制系统的主要任务是消除偏差。此时,偏差的权系数应较大;而当偏差较小时,为了减小超调,并使系统尽快稳定,主要应根据偏差变化率来改变控制量,此时,要求加大偏差变化率的权重。下面说明模糊控制规则表的制定。
(1)根据以往在控制过程中的实践经验加以总结,可得到数条模糊条件语句的集合。将偏差和偏差变化率的语言变量值各分为7个等级,可以总结出7×7=49条模糊条件语句,具体描述如下:

(2)根据以往的经验知识和反复的实验,采用三角形隶属函数形式,可以得到如图3所示的偏差e、偏差变化率ec以及控制量U的隶属度函数。据此确定对应论域中起作用的控制规则,并制定如表1所示的模糊控制状态表。
1.2.3 解模糊与模糊PID控制器的实现
在本设计中,利用CRI法则推理时控制过程是用查询控制规则表来产生控制量的,对误差信号e和误差变化率ec论域中全部元素的所有组合进行计算,便可计算出模糊控制量的输出U,并采用最大隶属度的规则进行模糊决策,将U经过清晰化转换成相应的确定量。通过查表得到的输出控制量,还需乘上比例因子Ku,即得到调制波。

图3 隶属函数

表1 e、ec、U的模糊控制规则表

设计该模糊PID控制器的特点是根据输入在最大偏差范围内,利用模糊推理的方法调整系统的控制量,而在最小偏差范围内转换成PID控制,两者的转换根据事先给定的偏差范围自动实现,以实现系统控制量的自动调整。
2 系统仿真结果分析

图4 系统仿真结果
根据以上分析在Matlab/Simulink7.1环境下,建立控制模型。其中,采样周期T取0.001;经验证误差基本论域取[-35,35],误差变化率基本论域取[-5,5],控制输出量基本论域取[-40,40],经推理模糊化因子0.02,kU=6.5;PID的参数Kp=1.2、Ki=10、Kd=0.000 5;开关频率为3 kHz,输入交流电压为380 V;交流负载电压220 V/50 Hz,120 000 kVA,输出滤波电容、电感分别为3 mH、5 000 μF;输出变压器参数380 V/120 V,250 000 kVA。
在电路仿真过程中,分别用普通PID和模糊PID控制对静变电源实施控制,开关阈值选为5 V,3个电压表分别测量与之对应的单相输出电压,仿真时间为0.5 s,仿真结果如图4所示。
根据仿真结果,静变电源从启动到电压稳定时,模糊PID控制效果明显比PID控制效果要好,而且在0.2 s突加负载、0.3 s断开负载时的电压能很快地恢复稳定;PID控制在突加和断开负载时电压波动大,恢复稳定所需时间长。由此可见,模糊PID控制静变电源的策略,兼具了模糊控制的动态特性和PID控制的稳态性能,使系统的稳态性、超调量得到了较大改善,提高了系统的响应速度和控制精度。
本文将模糊推理算法引入PID控制器中,解决了PID控制器在非线性系统中的收敛速度慢和误差精度低的难题。通过仿真实验,模糊PID控制器在线控制静变电源,其鲁棒性和自适应能力较强,对于干扰也有较好的抑制调节能力,满足了对静变电源输出的要求。整个系统的仿真结果验证了模糊PID控制算法应用于静变电源的正确性和可行性。
[1]李士勇.模糊控制·神经网络控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1996.
[2]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2000.
[3]张国良,曾静,柯熙政,等.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002.
[4]Yang Hongjun.Researching on an automatically leveling control system based on Fuzzy-PID[C].The eighth nations experiment with measure colloquium.2009:2619-2622.
[5]郝少杰,方康玲.基于模糊PID参数子整定的温度控制系统的研究[J].现代电子技术,2011(4):196-204.
猜你喜欢
湖南电力(2021年4期)2021-11-05
成都信息工程大学学报(2021年6期)2021-02-12
初中生世界·九年级(2020年9期)2020-09-21
测控技术(2018年10期)2018-11-25
西南交通大学学报(2016年3期)2016-06-15
广东石油化工学院学报(2016年3期)2016-05-17
电子制作(2016年21期)2016-05-17
电测与仪表(2016年14期)2016-04-11
通信电源技术(2016年5期)2016-03-22
地震地质(2015年3期)2015-12-25
