
基于面阵相机的接触轨几何参数检测系统
2012-03-13 01:22:42唐崇伟陈唐龙
电气化铁道 2012年3期
唐崇伟,陈唐龙
0 引言
检测接触轨几何参数即是测量接触轨中心位置距轨道中心位置的水平距离和接触轨受流面与相邻走行轨顶面的垂直距离。
目前国内大多是采用传统的接触式检测方法,即采用人工持轨道尺的检测方法。该检测方法效率低,工作量大。因此,开发一种新型在线、非接触式接触轨检测装置技术势在必行,但该技术在国内几乎是一片空白,更没有制定相关的检测标准。
激光三角法是光电检测技术的一种,因其具有非接触、高精度、易于控制等优点,在长距离及三维形貌等检测中有着广泛的应用。
1 接触轨在线检测系统检测原理
接触轨中心到轨道中心的标准距离为1 510 mm;接触轨距离基本轨顶面标准垂直高度为200 mm;正常线路接触轨水平距离和垂直高度标准偏差需要控制在±3 mm 的范围以内。
接触轨检测系统采用面阵相机对接触轨中心位置距离相机中心的水平距离和垂直距离进行准确测量,同时采用激光测距传感器对车体振动进行计算,减小车体振动和车体偏移对接触轨检测精度的影响。
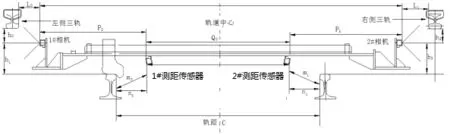
图1 接触轨在线检测系统原理图
参见图1,设p0、p1分别为左右激光测距传感器到左右相机背面的水平距离,m0、m1分别为左右激光测距传感器实时的检测数据;n0、n1分别为左右激光测距传感器在水平方向的投影;Q0为左右激光测距传感器的水平间距离;h1、h3分别为左右相机中心位置到对应侧走行轨轨面的垂直高度;h0、h2分别为左右相机中心位置到接触轨受流面的垂直距离;L0、L1分别为左右相机中心位置到接触轨外侧的水平距离;接触轨外侧到接触轨中心的水平距离为46 mm;轨距为C;左右两边接触轨的水平距离分别为x0、x1,故

左右接触轨的垂直距离分别为y0,y1,故

由图1 和上式可知,接触轨检测系统主要是测量L0、L1和h0、h2。本文是用激光三角测距法和面阵相机的标定方法测量L0、L1,h0、h2。
2 激光三角法检测原理
在激光三角法中,由光源发出的一束激光照射在待测物体平面上,通过反射最后在检测器上成像。当物体表面的位置发生改变时,其真实的物体位移可以由对像移的检测和计算得到。
激光三角法按入射光线与被测工件表面法线的关系分为直射式和斜射式。本文采用的方法为直射式激光三角法。与斜射式方法相比,直射式的分辨率虽然比斜射式的分辨率低,但测量范围较大,体积较小,光斑较小,光强集中,而且可以直接得到被测物体某点的位移情况。
三角法原理如图2 所示:激光器和成像系统组成系统的基本结构。激光光源照射到物体表面形成一个亮光点,成像系统把该光点汇聚到CCD 上形成像点,当所测距离Y 不同时像点会在CCD 上移动,反映在CCD 上的光点像位置X 也随之不同,在基线长度已知,光源和CCD 及透镜的相对位置确定的前提下,通过测量CCD 上像点的位置就能准确确定被测物体与相机之间的距离。
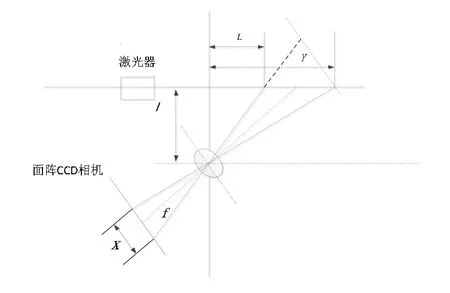
图2 直射式激光三角法原理图
根据图2 所示直射式三角形的相似关系有:

得Y 和X 两者之间的关系为

式中,Y 为被测距离,f 为成像系统焦距,l 为发光点中心到透镜中心的水平距离,即基线长度,L 为某一已知距离。在该距离处所成像正好位于CCD的中心。为使测量范围内各点成像很好,应使过镜头中心的垂线恰好是测量范围起始点与镜头中心连线所构成角的平分线。X 为像点在CCD 上移动的距离。因此只要测出X,就能测出Y。
3 面阵相机的标定
摄像机标定和标定过程的精度取决于场景的二维图像化的精度和可信度。只有使用选定精确标定过的摄像机,才能从图像投影坐标中获取真实世界物体的距离测量信息。该检测系统的面阵相机标定包括面阵相机的水平标定和垂直标定,所用标定方法是利用相机成像面的x、y 轴分别表示接触轨的水平和垂直距离。利用三角检测原理,计算接触轨的水平距离和垂直距离与面阵相机成像面x 和y轴的对应关系。
3.1 面阵相机水平方向的标定
面阵相机水平标定如图3 所示,面阵相机的分辨率为1 280×1 204,在1 280 个像素位置中选择300 个像素位置,以这300 个像素位置来标定接触轨中轴线到轨道中心的水平距离 。以这300 个像素位置的中心位置为接触轨中轴线到轨道中心的标准水平距离,即1 510 mm 时,接触轨在CCD 成像的位置。以两边150 个像素位置为其检测范围。
根据三角成像原理,当水平移动接触轨时,利用精密仪器测量接触轨的移动距离,可计算出接触轨在CCD 上成像的像点移动位置,从而得出接触轨中轴线到轨道中心此时的水平距离与接触轨在CCD 上位置的对应关系。

图3 面阵相机水平标定示意图
3.2 面阵相机垂直方向的标定
面阵相机垂直标定如图4 所示,由于接触轨的断口区域有一部分微微向上倾斜,也是接近角和离去角,为了测量接近角和离去角,相机垂直方向选取1024 个像素位置来标定接触轨受流面到相邻走行轨轨顶面的距离,以这1024 个像素位置的中心位置为轨受流面到相邻走行轨轨顶面的距离为200 mm 时,接触轨在CCD 成像的像点位置,以2边512 个像素位置为其检测范围。
根据三角成像原理,当上下移动接触轨时,利用精密仪器测量接触轨的移动距离,可计算出接触轨在CCD 上成像的像点移动位置,从而得出相机的图像坐标系与物理空间坐标系的对应关系。

图4 面阵相机垂直标定示意图
3.3 实验数据
表1 和表2 分别表示采用面阵相机的标定方法,接触轨的水平和垂直距离与图像坐标中x、y轴像素位置对应关系。

表1 接触轨垂直距离与图像坐标中垂直像素位置对应关系表

表2 接触轨水平距离与图像坐标中水平像素位置对应关系表
4 结语
针对接触轨在当前地铁供电中的广泛应用,接触轨几何参数会直接影响地铁牵引机车动力源的稳定性和可靠性,地铁接触轨几何参数检测系统能够为接触轨几何参数的评价提供重要指标,实现对接触轨几何参数进行精确测量与评估,为接触轨的维护及安全运营提供依据。本文设计了基于面阵的接触轨几何参数动态检测系统,运用面阵相机标定方法,通过激光三角法测量接触轨几何参数,作为接触轨是否出现故障的判断依据。该系统结构合理,简便易行,便于实际操作。
[1] 范志刚.光电测试技术[M].北京:电子工业出版社,2003.
[2] 迟桂纯.激光三角法微位移测量技术[J].工具技术,2007,(12):76-78.
[3] 顾世平,樊戈平,熊斌.北京地铁第三轨高低、水平距离检测系统[J].铁道建筑,1997,(5):9-12.
[4] 董霖,陈光熊,朱昊.地铁钢轨复合式第三轨/受电靴载流摩擦磨损特性研究[J].摩擦学学报,2007,27(3):274-277.
[5] 刘明,曾理江.透射型激光三角测量蜻蜓翅膀形状[J].仪器仪表学报,2003,24(1):95-97.
[6] 尤政,等.基于激光三角法的三维扫描光探测系统[J].宇航计测技术,1998,18(5):27-31.
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09 05:42:16
电子测试(2018年15期)2018-09-26 06:01:20
科学与财富(2018年20期)2018-08-22 19:35:16
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
测绘科学与工程(2017年1期)2017-05-04 03:40:45
光学精密工程(2016年3期)2016-11-07 09:03:34
中国继续医学教育(2016年26期)2016-10-25 10:54:00
中国医疗美容(2016年8期)2016-06-15 17:13:29
系统工程与电子技术(2016年2期)2016-04-16 05:16:51
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38
